
 商标分类
商标分类  商标转让
商标转让 
一种海上无人机回收装置的制作方法
 2021-02-13 15:02:30|
2021-02-13 15:02:30| 228|
228| 起点商标网
起点商标网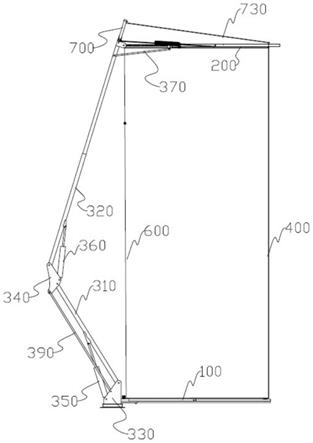
[0001]
本公开涉及无人机回收技术领域,具体涉及一种海上无人机回收装置。
背景技术:
[0002]
现有无人机的回收方式主要有:伞降回收、起落架滑跑着陆、拦阻网回收、气垫着陆回收、空中回收,这些回收方式基本都是适用于陆地无人机回收任务,因此受场地影响不能很好地运用在海域上进行无人机回收。
[0003]
现有的海域无人机回收方式回收风险较大,回收成本较高,例如伞降回收在顺风开伞时有很大的安全隐患,使其在回收时受到诸多环境因素的影响;起落架滑跑着落经济性虽好,安全系数较高,但是受场地因素影响需要有特定的跑道场地以供飞机滑行,显然这在海上作业是不易实现的。因此需要发明一种适用与海域进行无人机回收的装置系统,既保证回收的安全性又简单低成本。
技术实现要素:
[0004]
本申请的目的是针对以上问题,提供一种海上无人机回收装置。
[0005]
第一方面,本申请提供一种海上无人机回收装置,包括下横杆、上横杆以及连接在所述下横杆与上横杆之间的支撑臂机构及回收绳,所述上横杆与下横杆平行设置;所述支撑臂机构包括第一支臂及第二支臂,所述下横杆的一端固定连接有底座,所述第一支臂的一端连接在所述底座上,所述第一支臂的另一端连接有转接板,所述第二支臂的一端连接在所述转接板上,所述第二支臂的另一端与上横杆的一端连接;所述回收绳竖直连接在上横杆及下横杆远离支撑臂机构的端部;所述下横杆远离底座的端部设有gps示位器;所述底座上设有第一液压缸,所述第一液压缸的活动端连接在所述第一支臂上;所述转接板上设有第二液压缸,所述第二液压缸的活动端连接在所述第二支臂上。
[0006]
根据本申请实施例提供的技术方案,所述上横杆与下横杆远离所述回收绳的端部之间连接有橡筋阻尼绳,所述橡筋阻尼绳包括橡筋绳与连接绳,所述橡筋绳的一端连接在上横杆的端部,橡筋绳的另一端与连接绳的一端连接,连接绳的另一端连接在下横杆的端部。
[0007]
根据本申请实施例提供的技术方案,所述第二支臂包括定长臂与伸缩臂,所述定长臂的一端连接在转接板上,定长臂的另一端向内凹陷有容纳腔,所述容纳腔内壁设有螺纹,所述伸缩臂的外表面设有螺纹,所述伸缩臂的一端螺纹连接在所述容纳腔内;所述第二液压缸的活动端连接在所述定长臂上。
[0008]
根据本申请实施例提供的技术方案,所述上横杆包括依次连接的第一段体及第二段体,所述第一段体通过销轴连接在伸缩臂的端部,第二段体通过销轴连接在第一段体的端部,所述回收绳的一端连接在第二段体远离第一段体的端部。
[0009]
根据本申请实施例提供的技术方案,所述第一段体上均匀开设若干减重孔。
[0010]
根据本申请实施例提供的技术方案,所述伸缩臂的端部对应上横杆设有加强连接
件,所述加强连接件包括水平杆以及固定在水平杆中心垂直设置并向远离伸缩臂方向延伸的垂直杆,所述水平杆的两端以及垂直杆的端部与上横杆之间分别连接有加强绳。
[0011]
根据本申请实施例提供的技术方案,所述水平杆的两端连接的加强绳分别包括第一绳部及第二绳部,所述第一绳部与第二绳部之间连接有缓冲吸能弹簧,所述第一绳部远离缓冲吸能弹簧的一端连接在水平杆的端部,第二绳部远离缓冲吸能弹簧的端部连接在上横杆上。
[0012]
根据本申请实施例提供的技术方案,所述伸缩臂与上横杆之间连接有倾斜设置的第一加强杆,所述第一加强杆的一端连接在伸缩臂上,另一端连接在第一段体与第二段体的衔接处。
[0013]
根据本申请实施例提供的技术方案,所述底座的底部设有底盘,所述底盘的顶端设有可旋转的旋转盘,所述底座安装在所述旋转盘的表面。
[0014]
根据本申请实施例提供的技术方案,所述底座与转接板之间连接有第二加强杆,所述第二加强杆的一端连接在底座上,另一端连接在转接板上。
[0015]
本发明的有益效果:本申请提供一种海上无人机回收装置,在海域回收无人机时,通过控制无人机飞向回收绳,利用无人机翼挂钩钩住回收绳实现无人机回收;利用第一液压缸及第二液压缸调整第一支臂及第二支臂的角度从而调整支撑臂机构的高度,从而适应不同长度的回收绳,灵活满足使用需求,上横杆与下横杆平行设置,回收绳竖直连接在上横杆与下横杆之间,操作实现简单、成本低、回收安全性高。
附图说明
[0016]
图1及图2为本申请第一种实施例的结构示意图;
[0017]
图3为图2中a部分的放大图;
[0018]
图4为图2中b部分的放大图;
[0019]
图5为本申请第一种实施例的装置安装在船舶上的结构示意图;
[0020]
图中所述文字标注表示为:100、下横杆;200、上横杆;210、第一段体;220、第二段体;310、第一支臂;320、第二支臂;321、定长臂;322、伸缩臂;330、底座;340、转接板;350、第一液压缸;360、第二液压缸;370、第一加强杆;380、底盘;381、旋转盘;390、第二加强杆;400、回收绳;500、gps示位器;600、橡筋阻尼绳;700、加强连接件;710、水平杆;720、垂直杆;730、加强绳;731、第一绳部;732、第二绳部;733、缓冲吸能弹簧。
具体实施方式
[0021]
为了使本领域技术人员更好地理解本发明的技术方案,下面结合附图对本申请进行详细描述,本部分的描述仅是示范性和解释性,不应对本申请的保护范围有任何的限制作用。
[0022]
如图1至图4所示为本申请的第一种实施例的示意图,包括下横杆100、上横杆200以及连接在所述下横杆100与上横杆200之间的支撑臂机构及回收绳400,所述上横杆200与下横杆100平行设置;
[0023]
所述支撑臂机构包括第一支臂310及第二支臂320,所述下横杆100的一端固定连接有底座330,所述第一支臂310的一端通过销柱可转动地连接在所述底座330上,所述第一
支臂310的另一端通过销柱可转动地连接有转接板340,所述第二支臂320的一端通过销柱可转动地连接在转接板340上,所述第二支臂320的另一端与上横杆200的一端连接;所述回收绳400竖直连接在上横杆200及下横杆100远离支撑臂机构的端部;
[0024]
所述底座330上设有第一液压缸350,所述第一液压缸350的活动端即活塞端连接在所述第一支臂310上,第一液压缸350的活动端对第一支臂310起到支撑作用,同时通过第一液压缸350活动端的伸缩可带动第一支臂310相对底座330转动;所述转接板340上设有第二液压缸360,所述第二液压缸360的活动端连接在所述第二支臂320上,第二液压缸360的活动端对第二支臂320起到支撑作用,同时通过第二液压缸360的活动端的伸缩带动第二支臂320相对转接板340转动。
[0025]
本实施例中,回收绳400采用耐磨耐高温的材质,本实施例中,回收绳400竖直设置,优选地,回收绳400的长度为14米,上横杆200长度为6米。
[0026]
本实施例中,底座330上对应下横杆100设置第一固定座,第一固定座与下横杆100采用方管套插形式,与下横杆100通过方管外形尺寸配合进行插接固定,下横杆100插入第一固定座内部,并用销钉锁止,防止下横杆100脱出。
[0027]
本实施例中,将回收装置设置在船舶上,如图5所示,为本申请装置安装在船舶上的结构示意图,通过第一液压缸350及第二液压缸360的活塞端的收缩调整第一支臂310及第二支臂320的相对角度,进而达到调整支撑机构整体高度的目的。
[0028]
在一优选实施方式中,所述上横杆200与下横杆100远离所述回收绳400的端部之间连接有橡筋阻尼绳600,所述橡筋阻尼绳600包括橡筋绳610与连接绳620,所述橡筋绳610的一端连接在上横杆200的端部,橡筋绳610的另一端与连接绳620的一端连接,连接绳620的另一端连接在下横杆100的端部。本优选实施方式中,在上横杆200与下横杆100对应回收绳400的对侧设置橡筋阻尼绳600,一方面可提高装置的结构稳定性,另一方面通过设置一段3米长的橡筋绳610,可对无人机与回收绳400撞击过程中的吸收震动降低缓冲的作用,提高装置稳定性,降低冲击强度。本优选实施方式中,连接绳620的材质设为与回收绳400材质一致。
[0029]
在一优选实施方式中,所述第二支臂320包括定长臂321与伸缩臂322,所述定长臂321的一端可转动地连接在转接板340上,定长臂321的另一端向内凹陷有容纳腔,所述容纳腔内壁设有螺纹,所述伸缩臂322的外表面设有螺纹,所述伸缩臂322的一端螺纹连接在所述容纳腔内;所述第二液压缸360的活动端连接在所述定长臂321上。本优选实施方式中,将第二支臂320设置为长度可调节的结构,可满足不同长度回收绳400的使用需求。本优选实施方式中,通过螺纹调整伸缩臂322伸出定长臂321的长度。
[0030]
在一优选实施方式中,所述上横杆200包括依次连接的第一段体210及第二段体220,所述第一段体210通过销轴连接在伸缩臂322的端部,第二段体220通过销轴连接在第一段体210上,所述回收绳400的一端连接在第二段体220的端部。
[0031]
本优选实施方式中,伸缩臂322的端部对应第一段体210设有第二固定座,第二固定座与第一段体210端部采用开口方管对接形式,并通过销轴与第一段体210固定,销轴竖直安装,上横杆200可以销轴为圆心进行沿飞行方向的回摆动作。
[0032]
优选地,所述第一段体210上均匀开设若干减重孔。设置减重孔的目的是为降低上横杆200的整体质量,从而提高上横杆200与第二支臂320连接的稳定性,提高整体装置的工
作稳定性。
[0033]
在一优选实施方式中,所述伸缩臂322的端部对应上横杆200设有加强连接件700,所述加强连接件700包括水平杆710以及固定在水平杆710中心垂直设置并向远离伸缩臂322方向延伸的垂直杆720,所述水平杆710的两端以及垂直杆720的端部与上横杆200之间分别连接有加强绳730。本优选实施方式中,在上横杆200的端部设置加强连接件700,在加强连接件700与上横杆200之间设置加强绳730,可进一步增加上横杆200的连接强度,保证无人机与回收绳400撞击接触时上横杆200的连接强度。
[0034]
优选地,所述水平杆710的两端连接的加强绳730分别包括第一绳部731及第二绳部732,所述第一绳部731与第二绳部732之间连接有缓冲吸能弹簧733,所述第一绳部731远离缓冲吸能弹簧733的一端连接在水平杆710的端部,第二绳部732远离缓冲吸能弹簧733的端部连接在上横杆200上。
[0035]
本优选实施方式中,在加强绳730上连接缓冲吸能弹簧733可起到对无人机与回收绳400撞击过程中产生的动能进行有效吸收,提高装置稳定性,降低冲击强度。本优选实施方式中,第一绳部731与第二绳部732均设置为钢丝绳。
[0036]
本优选实施方式中,由于上横杆200长度较长,由于自重会引起杆头下垂,采用t型结构的加强连接件700和斜拉索结构(加强绳730)对上横杆200进行加强,以保证上横杆200在回收飞机时不会因弯曲变形过大引起折断等问题,加强连接件700采用方钢梁制造。
[0037]
在一优选实施方式中,所述伸缩臂322与上横杆200之间连接有倾斜设置的第一加强杆370,所述第一加强杆370的一端固定连接在伸缩臂322上,另一端连接在第一段体210与第二段体220的衔接处。设置第一加强杆370进一步增加上横杆200的连接强度,同时对上横杆200起到减震缓冲作用,提高装置稳定性,降低冲击强度。
[0038]
在一优选实施方式中,所述底座330的底部设有底盘380,所述底盘380的顶端设有可旋转的旋转盘381,所述底座330安装在所述旋转盘381的表面。本优选实施方式中,底座330可相对于底盘380旋转,底盘380的底部固定在船舶上,因此可调整底座330的角度,也即调整下横杆100的角度,而且上横杆200与下横杆100通过支撑臂机构及回收绳400同步旋转相应的角度,通过底座330的旋转调整回收绳400的位置,方便无人机回收。
[0039]
在一优选实施方式中,所述底座330与转接板340之间连接有第二加强杆390,所述第二加强杆390与第一支臂310平行设置,所述第二加强杆390的一端铰接在所述底座330上,另一端连接在转接板340上。本优选实施方式中,对应第一支臂310设置与之平行的第二加强杆390可增加第一支臂310对第二支臂320的支撑强度。
[0040]
本实施例中,底座330采用16mm厚q235钢板,切割成三角形状,并焊接成半盒状结构,底座330固定于底盘380的旋转盘381表面,通过销轴分别连接第一支臂310、第二加强杆390及第一液压缸350的端部。
[0041]
在一优选实施方式中,所述下横杆100远离底座330的端部设有gps示位器500。本优选实施方式中,gps示位器500方便无人机定位回收装置,用于飞机撞绳点经纬位置坐标的定位显示,进而使得无人机精准飞向回收装置进行回收。gps示位器500安装在安装座上,安装座固定于下横杆100末端。安装座采用铝合金金属圆盘,用螺栓直接固定在下横杆100上,gps示位器500可直接放置于圆盘座上。
[0042]
本实施例中,回收装置根据需求安装在船上,接通电源后使用遥控器控制第二支
臂320升起一定角度,安装上横杆200、下横杆100并挂好回收绳400,控制遥控升高第二液压缸360达到工作位置,升高第一液压缸350达到工作位置。回收装置总体为门字形结构,回收绳400与橡筋阻尼绳600呈封闭环形布置,上下横杆100之间为回收绳400,回收绳400为竖直状态。飞机回收时,与回收绳400的撞击点选定在回收绳400中点及以上的范围内,确保飞机固定在回收绳400上停稳后,未锁定的翼尖不触及下横杆100。为保证回收的安全性,飞机的回收过程,保障飞行航线在回收绳400与橡筋阻尼绳600的环形框外侧撞击,避免从环形内部回收。飞机撞击回收绳400后,翼尖钩锁定回收绳400,飞机以翼尖钩为回转中心,翼展长为半径做振幅衰减的圆周运动。第一支臂310与第二支臂320中的定长臂321构成等腰钝角三角形,保证回收装置重心处于回转中心处。
[0043]
无人机海上回收可分为三个阶段:对准撞绳、滑行锁定及回旋摆动。
[0044]
对准撞绳:无人机在gps示位器500导引下,实现精确对准回收装置并由机翼根部前缘撞上回收绳400,此阶段若未实现精确对准,无人机可复飞后再次导引撞绳;
[0045]
滑行锁定:无人机机翼前缘撞上回收绳400后继续滑行至翼尖,翼尖挂钩钩住并锁定回收绳400,无人机以回收绳400为圆心做圆周运动,并沿飞行方向不断拉伸回收绳400,消耗回收能量,此时无人机发动机在飞控指令下关闭发动机;
[0046]
回旋摆动:在回收动能作用下无人机悬挂在回收绳400上作幅度逐步衰减的回旋摆动,当无人机摆动幅度小到一定程度时,即认为无人机回收过程结束。
[0047]
回收装置要可靠回收飞机,飞机以飞行速度撞击回收绳400,回收总动能主要依靠橡筋阻尼绳600及缓冲吸能弹簧733吸收,剩余部分靠零件间的摩擦、撞击、弹性变形等吸收。
[0048]
本文中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实例的说明只是用于帮助理解本申请的方法及其核心思想。以上所述仅是本申请的优选实施方式,应当指出,由于文字表达的有限性,而客观上存在无限的具体结构,对于本技术领域的普通技术人员来说,在不脱离本申请原理的前提下,还可以做出若干改进、润饰或变化,也可以将上述技术特征以适当的方式进行组合;这些改进润饰、变化或组合,或未经改进将申请的构思和技术方案直接应用于其它场合的,均应视为本申请的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 无人机

 热门咨询
热门咨询




tips