
 商标分类
商标分类  商标转让
商标转让 
一种无人机永磁抓放装置翻转机构的制作方法
 2021-02-13 15:02:32|
2021-02-13 15:02:32| 415|
415| 起点商标网
起点商标网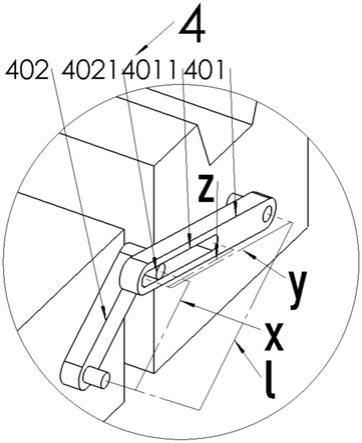
[0001]
本实用新型涉及光机械装置技术领域,尤其涉及一种无人机永磁抓放装置翻转机构。
背景技术:
[0002]
光伏发电是一种清洁能源发电技术,它是利用半导体界面的光生伏特效应而将光能直接转变为电能的一种技术。主要由太阳电池板(组件)、控制器和逆变器三大部分组成,主要部件由电子元器件构成。太阳能电池经过串联后进行封装保护可形成大面积的太阳电池组件,再配合上功率控制器等部件就形成了光伏发电装置。其中光伏板接收日照的强度是影响光伏发电效率的主要因素之一,如果光伏板表面沾满灰尘或者被杂物掩盖,将使得光伏板接收日照的强度相对下降,从而使得发电效率降低,因此为了保证发电效率,对光伏板表面进行定期清理是必不可少的。
[0003]
现有技术中,对光伏板的清扫主要采用以下方式:
[0004]
1)人工清扫,人工清扫存在的问题是劳动效率较低,面对大规模的光伏电站清理成本高,并且对于高处安装的光伏板,使用人清理也较危险;
[0005]
2)在光伏板上增加如雨刮类的装置,定期打开雨刮装置对光伏板进行清扫,这种方式存在的问题是需要在光伏板上另外增加一套装置,附加的装置使光伏板改造成本非常高;
[0006]
3)使用带清扫刷的车子,移动车子的过程中清扫刷在光伏板上表面扫过,从而对光伏板进行清扫,这种方式存在的问题是适用范围较窄,只能用于场地较平坦的地区,对于安装在山区、凹凸不平地面或高处的光伏板,这种方式并不适用。
[0007]
为了解决上述问题,申请人研究了一种光伏板无人机清扫系统,但是申请人在使用中发现,使用步进电机直连磁力座永磁体转轴,通过步进电机控制磁力座永磁体转动的角度,常年累月使用会导致累计误差,使得磁力座永磁体转动的角度初始位置发生变化,导致磁力底座开关失灵,使得系统稳定性较差。
技术实现要素:
[0008]
为了解决以上现有技术的缺点和不足之处,本实用新型的目的是提供一种无人机永磁抓放装置翻转机构。
[0009]
本实用新型的技术方案是:一种无人机永磁抓放装置翻转机构,其特征在于,包括:
[0010]
摇杆,所述摇杆上开有沿摇杆长度方向的导向槽,摇杆一端固定连接在磁力座永磁体的转轴上;
[0011]
曲柄,所述曲柄一端固定连接在步进电机的转轴上,曲柄另一端固定连接圆销,圆销与导向槽相匹配,圆销滑动安装在导向槽内。
[0012]
进一步地,所述翻转机构满足下列公式:
[0013][0014]
其中,y为导向槽到磁力座永磁体的转轴的最远距离,x为圆销到步进电机转轴的距离,l为步进电机转轴到磁力座转轴的距离,z为导向槽的长度。
[0015]
本实用新型的有益效果是:与现有技术相比,
[0016]
1)本实用新型的步进电机通过翻转机构连接磁力座永磁体,使得控制步进电机转动,就能使曲柄带动摇杆摆动一定角度,从而使磁力座永磁体翻转一定角度,使磁力座的开关状态切换,翻转机构的使用相比直接使用步进电机直连磁力座永磁体转轴,由于有导向槽的限位作用,摇杆摆动角度始终固定,不会产生累计误差,系统稳定性高;
[0017]
2)本实用新型通过对x、y、z和l的关系进行限定,使得翻转机构翻转角度始终为90度,确保磁力座永磁体翻转后如果使关闭则吸力最小,而翻转后如果是打开则吸力最大,保证抓取时能够稳定抓取,而释放时能够及时释放。
附图说明
[0018]
图1为本实用新型实施实例1的立体结构示意图;
[0019]
图2为图1b处的局部视图;
[0020]
图3为本实用新型实施实例1的前视图;
[0021]
图4为图3a-a剖面线的剖视图;
[0022]
图5为本实用新型实施实例1的电路连接框图。
具体实施方式
[0023]
下面结合附图及具体的实施例对实用新型进行进一步介绍:
[0024]
实施例1:本实施例一种无人机永磁抓放装置翻转机构,其特征在于,包括:
[0025]
摇杆401,所述摇杆401上开有沿摇杆401长度方向的导向槽4011,摇杆401 一端焊接连接在磁力座302永磁体的转轴上;
[0026]
曲柄402,所述曲柄402一端焊接连接在步进电机303的转轴上,曲柄402 另一端焊接连接圆销4021,圆销4021与导向槽4011相匹配,圆销4021滑动安装在导向槽4011内。
[0027]
进一步地,所述翻转机构4满足下列公式:
[0028][0029]
其中,y为导向槽4011到磁力座302永磁体的转轴的最远距离,x为圆销4021 到步进电机303转轴的距离,l为步进电机303转轴到磁力座302转轴的距离,z 为导向槽4011的长度。
[0030]
实施例2:本实施例一种光伏板无人机清扫系统,包括:无人机1;扫地机器人2,所述扫地机器人2通过抓放装置3与无人机1连接,所述抓放装置3与无人机1无线连接。抓放装置3可以使电磁铁和铁板,铁板螺栓连接在无人机1 下部,电磁铁螺栓连接在扫地机器2人上部。这里的无人机可以是paparazzi uav 开源无人机,也可以使用大疆公司生产的经纬
m600 pro无人机。这里的扫地机器人可采用小米等公司生产的家用扫地机器人,也可以使用玻妞擦窗机器人。
[0031]
进一步地,所述抓放装置3包括:铁磁板301,所述铁磁板301为铁磁材料,铁磁板301连接在无人机1下部;磁力座302,所述磁力座302螺栓连接在扫地机器人2上部,磁力座302的磁吸面朝正上方;步进电机303,所述步进电机303 螺栓连接在扫地机器人2上部,所述步进电机303与磁力座302的永磁体连接,步进电机303转动带动步进电机303的永磁体转动使磁力座302的开关状态切换,步进电机303与控制器5电连接;控制器5,所述控制器5设置在扫地机器人2 上,控制器5与无线通信模块6电连接;无线通信模块6,所述无线通信模块6 与无人机1电连接。这里的控制器5可采用arduino等带外围电路的控制器,这里的无线通信模块6可采用wifi模块、蓝牙模块或4g模块。
[0032]
进一步地,所述铁磁板301通过连接杆304连接在无人机1下方。
[0033]
进一步地,所述连杆304包括:主筒3041,所述主筒3041上端螺栓连接无人机1,主筒3041方向竖直;压簧3043,所述压簧3043设置在主筒3041内,压簧3043上端连接在主筒3041上;拉杆3044,所述拉杆3044上端螺栓连接或焊接连接在压簧3043下端,拉杆3044外径小于主筒3041内径,拉杆3044上端到压簧3043上端的距离小于主筒3041下端到压簧3043上端的距离;其中,铁磁板301螺栓连接或焊接连接在拉杆3044下端。
[0034]
进一步地,所述连杆304还包括:拉力传感器3042,所述压簧3043上端通过拉力传感器3042连接在主筒3041上,拉力传感器3042与无人机1电连接。这里的拉力传感器3042可采用jlbs-md金诺s型称重传感器。
[0035]
进一步地,所述步进电机303通过翻转机构4与磁力座302永磁体连接,所述翻转机构4包括:摇杆401,所述摇杆401上开有沿摇杆401长度方向的导向槽4011,摇杆401一端焊接连接在磁力座302永磁体的转轴上;曲柄402,所述曲柄402一端焊接连接在步进电机303的转轴上,曲柄402另一端焊接连接圆销4021,圆销4021与导向槽4011相匹配,圆销4021滑动安装在导向槽4011 内。圆销4021直径远小于导向槽4011长度。
[0036]
进一步地,所述翻转机构4满足下列公式:
[0037][0038]
其中,y为导向槽4011到磁力座302永磁体的转轴的最远距离,x为圆销 4021到步进电机303转轴的距离,l为步进电机303转轴到磁力座302转轴的距离,z为导向槽4011的长度。
[0039]
一种光伏板无人机清扫系统的释放控制方法,所述方法包括以下步骤:
[0040]
s11、控制无人机1将扫地机器人2运送到光伏板上方;
[0041]
s12、控制无人机1下降直到拉力传感器3042检测到的拉力值小于无人机 1中存储的预设释放值m1,其中m1小于扫地机器人2与抓放装置3的重量之和;
[0042]
s13、无人机1向无线通信模块6发送磁力座302关闭指令,控制器5接收到无线通信模块6发送过来的磁力座302关闭指令后控制步进电机303顺时针或逆时针转动90度,使磁力座302关闭。
[0043]
一种光伏板无人机清扫系统的抓取控制方法,所述方法包括以下步骤:
[0044]
s21、控制无人机1运动到扫地机器人2正上方;
[0045]
s22、控制无人机1下降直到拉力传感器3042检测到的拉力值小于无人机 1中存储的第一预设抓取值m2,m2小于铁磁板301、拉杆3044和弹簧的重量之和;
[0046]
s23、控制无人机1竖直上升直到拉力传感器3042检测到的拉力值大于或等于无人机1中存储的第二预设抓取值m3,其中m3小于扫地机器人2与抓放装置3的重量之和;
[0047]
s24、无人机1向无线通信模块6发送磁力座302打开指令,控制器5接收到无线通信模块6发送过来的磁力座302打开指令后控制步进电机303顺时针或逆时针转动90度,使磁力座302打开。
[0048]
以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips