
 商标分类
商标分类  商标转让
商标转让 
一种无人机用图像采集装置的制作方法
 2021-02-13 15:02:52|
2021-02-13 15:02:52| 198|
198| 起点商标网
起点商标网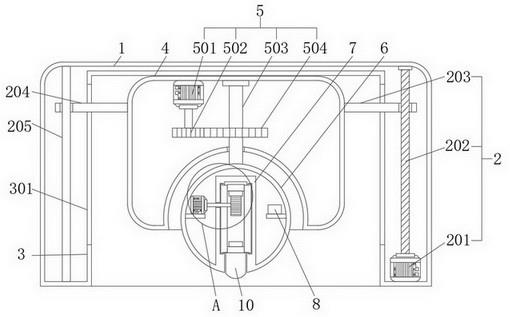
[0001]
本实用新型涉及无人机图像采集领域,更具体地说,涉及一种无人机用图像采集装置。
背景技术:
[0002]
无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务,无人机按应用领域,可分为军用与民用,军用方面,无人机分为侦察机和靶机,民用方面,无人机行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
[0003]
但是现有的无人机在需要对周围环境进行多方位图像采集时,需要使用者通过控制器对无人机本身的位置进行操控调整,不仅因图像采集繁琐浪费了大量时间,也提高了使用者的操控难度,因此,本领域技术人员提供了一种无人机用图像采集装置,以解决上述背景技术中提出的问题。
技术实现要素:
[0004]
1.要解决的技术问题
[0005]
针对现有技术中存在的问题,本实用新型的目的在于提供一种无人机用图像采集装置,其优点在于使无人机图像采集装置可以对多方位进行图像采集,提高采集效率,降低操控难度。
[0006]
2.技术方案
[0007]
为解决上述问题,本实用新型采用如下的技术方案。
[0008]
一种无人机用图像采集装置,包括外壳,所述外壳的内壁固定连接有限位座,所述外壳的内壁设置有升降机构,所述升降机构贯穿限位座并延伸至限位座的内部,所述升降机构的内壁固定连接有升降箱,所述升降箱的内顶壁设置有转动机构,所述转动机构贯穿升降箱并延伸至升降箱的下方,所述转动机构的底部固定连接有转动球,所述转动球的内壁固定连接有固定座,所述转动球的内壁设置有调节机构,所述调节机构依次贯穿转动球和固定座并延伸至固定座的内部,所述调节机构的底部设置有摄像头,所述转动球的内壁右侧固定连接有配重块。
[0009]
进一步的,所述升降机构包括第一电机,所述第一电机的底部与外壳的内底壁固定连接,所述第一电机的输出轴固定连接有与外壳的内顶壁转动连接的丝杆,所述丝杆的表面螺纹连接有第一连接杆,所述外壳的内壁固定连接有限位杆,所述限位杆的表面活动连接有第二连接杆。
[0010]
进一步的,所述限位座的内壁两侧均开设有条形口,所述第一连接杆和所述第二
连接杆均依次贯穿外壳和条形口并延伸至条形口的外部。
[0011]
进一步的,所述转动机构包括第二电机,所述第二电机的顶部与升降箱的内顶壁固定连接,所述第二电机的输出轴固定连接有第一齿轮,所述升降箱的内顶壁转动连接有转动杆,所述转动杆贯穿升降箱并延伸至升降箱的下方,所述转动杆的表面固定连接有与第一齿轮啮合连接的第二齿轮。
[0012]
进一步的,所述调节机构包括第三电机,所述第三电机与转动球的内壁左侧固定连接,所述第三电机的输出轴固定连接有传动杆,所述传动杆依次贯穿转动球和固定座并延伸至固定座的内部,所述固定座的右侧固定连接有第三齿轮,所述第三齿轮的顶部啮合连接有齿圈,所述齿圈的两侧均固定连接有滑动环。
[0013]
进一步的,所述固定座的内壁两侧均开设有环形滑槽,所述滑动环位于环形滑槽的内壁。
[0014]
3.有益效果
[0015]
相比于现有技术,本实用新型的优点在于:
[0016]
(1)本方案通过设置升降机构,在不需要进行图像采集时可以将升降箱以及转动球收入外壳内部,防止无人机下降时对图像采集装置造成破坏,通过设置转动机构,可以对转动球进行水平方向的调节,从而提高摄像头的采集范围,提高图像采集速度,降低无人机操控难度,通过设置调节机构,可以便于对摄像头进行半圆调节,从而提高摄像头的图像采集范围,提高图像采集速度,降低无人机的操控难度;
[0017]
(2)通过设置配重块,在转动球的内部增加配重块可以维持转动球的平衡性,防止转动球在转动过程中对无人机造成平衡性的影响,通过设置条形口,便于对第一连接杆和第二连接杆进行限位,防止升降箱在进行上下移动时出现位置偏移,通过设置环形滑槽,可以对滑动环进行限位,从而防止齿圈在转动时出现位置偏移的情况。
附图说明
[0018]
图1为本实用新型的结构示意图;
[0019]
图2为本实用新型图1中a处的放大图;
[0020]
图3为本实用新型调节机构的侧视图;
[0021]
图4为本实用新型升降箱、转动球、调节机构和摄像头的立体图。
[0022]
图中标号说明:
[0023]
1、外壳;2、升降机构;201、第一电机;202、丝杆;203、第一连接杆;204、第二连接杆;205、限位杆;3、限位座;301、条形口;4、升降箱;5、转动机构;501、第二电机;502、第一齿轮;503、转动杆;504、第二齿轮;6、转动球;7、调节机构;701、第三电机;702、传动杆;703、第三齿轮;704、齿圈;705、滑动环;8、配重块;9、固定座;901、环形滑槽;10、摄像头。
具体实施方式
[0024]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0025]
请参阅图1-4,本实用新型实施例中,一种无人机用图像采集装置,包括外壳1,外壳1的内壁固定连接有限位座3,外壳1的内壁设置有升降机构2,升降机构2贯穿限位座3并延伸至限位座3的内部,升降机构2的内壁固定连接有升降箱4,升降箱4的内顶壁设置有转动机构5,转动机构5贯穿升降箱4并延伸至升降箱4的下方,转动机构5的底部固定连接有转动球6,转动球6的内壁固定连接有固定座9,转动球6的内壁设置有调节机构7,调节机构7依次贯穿转动球6和固定座9并延伸至固定座9的内部,调节机构7的底部设置有摄像头10,转动球6的内壁右侧固定连接有配重块8,通过设置配重块8,在转动球6的内部增加配重块8可以维持转动球6的平衡性,防止转动球6在转动过程中对无人机造成平衡性的影响。
[0026]
升降机构2包括第一电机201,第一电机201的底部与外壳1的内底壁固定连接,第一电机201的输出轴固定连接有与外壳1的内顶壁转动连接的丝杆202,丝杆202的表面螺纹连接有第一连接杆203,外壳1的内壁固定连接有限位杆205,限位杆205的表面活动连接有第二连接杆204,通过设置升降机构2,在不需要进行图像采集时可以将升降箱4以及转动球6收入外壳1内部,防止无人机下降时对图像采集装置造成破坏。
[0027]
限位座3的内壁两侧均开设有条形口301,第一连接杆203和第二连接杆204均依次贯穿外壳1和条形口301并延伸至条形口301的外部,通过设置条形口301,便于对第一连接杆203和第二连接杆204进行限位,防止升降箱4在进行上下移动时出现位置偏移。
[0028]
转动机构5包括第二电机501,第二电机501的顶部与升降箱4的内顶壁固定连接,第二电机501的输出轴固定连接有第一齿轮502,升降箱4的内顶壁转动连接有转动杆503,转动杆503贯穿升降箱4并延伸至升降箱4的下方,转动杆503的表面固定连接有与第一齿轮502啮合连接的第二齿轮504,通过设置转动机构5,可以对转动球6进行水平方向的调节,从而提高摄像头10的采集范围,提高图像采集速度,降低无人机操控难度。
[0029]
调节机构7包括第三电机701,第三电机701与转动球6的内壁左侧固定连接,第三电机701的输出轴固定连接有传动杆702,传动杆702依次贯穿转动球6和固定座9并延伸至固定座9的内部,固定座9的右侧固定连接有第三齿轮703,第三齿轮703的顶部啮合连接有齿圈704,齿圈704的两侧均固定连接有滑动环705,通过设置调节机构7,可以便于对摄像头10进行半圆调节,从而提高摄像头10的图像采集范围,提高图像采集速度,降低无人机的操控难度。
[0030]
固定座9的内壁两侧均开设有环形滑槽901,滑动环705位于环形滑槽901的内壁,通过设置环形滑槽901,可以对滑动环705进行限位,从而防止齿圈704在转动时出现位置偏移的情况。
[0031]
本实用新型的工作原理是:在需要使用时,首先将无人机用图像采集装置嵌入安装在无人机的底部,在无人机飞行到制定位置后,第一电机201启动,第一电机201的输出轴带动丝杆202转动,丝杆202带动第一连接杆203在条形口301的内壁进行上下移动,通过设置条形口301,便于对第一连接杆203和第二连接杆204进行限位,防止升降箱4在进行上下移动时出现位置偏移,第一连接杆203带动升降箱4进行上下移动,通过设置升降机构2,在不需要进行图像采集时可以将升降箱4以及转动球6收入外壳1内部,防止无人机下降时对图像采集装置造成破坏,升降箱4带动第二连接杆204在限位杆205的表面进行上下滑动,随后升降箱4带动转动球6下降到外壳1的外部,随后摄像头10对目标进行图像采集,当需要对同一空间内不同方位的目标进行图像采集时,第二电机501启动,第二电机501的输出轴带
动第一齿轮502转动,第一齿轮502啮合带动第二齿轮504转动,第二齿轮504带动转动杆503转动,随后转动杆503带动转动球6进行水平方向转动,从而转动球6带动调节机构7和摄像头10进行水平方向转动,通过设置转动机构5,可以对转动球6进行水平方向的调节,从而提高摄像头10的采集范围,提高图像采集速度,降低无人机操控难度,与此同时第三电机701启动,第三电机701的输出轴带动传动杆702进行转动,传动杆702带动第三齿轮703进行转动,第三齿轮703啮合带动齿圈704转动,齿圈704带动滑动环705在环形滑槽901内进行滑动,通过设置环形滑槽901,可以对滑动环705进行限位,从而防止齿圈704在转动时出现位置偏移的情况,从而齿圈704稳定的带动摄像头10进行弧形调节即可,通过设置调节机构7,可以便于对摄像头10进行半圆调节,从而提高摄像头10的图像采集范围,提高图像采集速度,降低无人机的操控难度。
[0032]
需要说明的是,以上说明中第一电机201、第二电机501、第三电机701和摄像头10等均为现有技术应用较为成熟的器件,具体型号可根据实际的需要选择,同时第一电机201、第二电机501、第三电机701和摄像头10的供电可为内置电源供电,也可为市电供电,具体的供电方式视情况选择,在此不做赘述。
[0033]
以上所述,仅为本实用新型较佳的具体实施方式;但本实用新型的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其改进构思加以等同替换或改变,都应涵盖在本实用新型的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 无人机

 热门咨询
热门咨询




tips