
 商标分类
商标分类  商标转让
商标转让 
一种螺旋桨相同步控制中的相角处理逻辑的制作方法
 2021-02-13 14:02:32|
2021-02-13 14:02:32| 274|
274| 起点商标网
起点商标网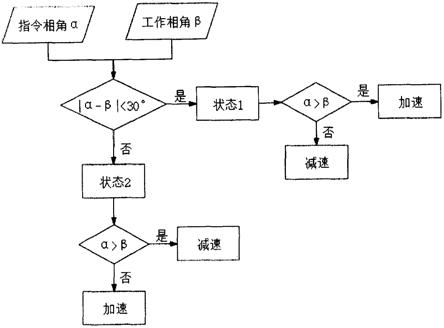
[0001]
本发明用于螺旋桨相同步控制中的相角处理,涉及一种螺旋桨相同步控制中的相角处理逻辑,属于螺旋桨相同步控制领域,可用于螺旋桨的噪声控制。
背景技术:
[0002]
航空涡桨发动机具有耗油率低、单台功率大、速度特性和机动能力好等优点。与涡喷涡扇等发动机相比,其缺点在于螺旋桨直接在空气中高速旋转,产生的较大的噪声,而多螺旋桨飞机由于多螺旋桨旋转对机舱产生很大的噪声和振动。螺旋桨飞机的内部噪声水平为85~105db,而若要达到涡扇发动机飞机相同的内部噪声水平,其噪声需要下降25db。螺旋桨相同步控制降噪利用已有的声源相互抵消,通过控制多螺旋桨飞机的几个螺旋桨保持设定的相角差,使原本独立的螺旋桨产生的噪声振动部分抵消,达到降低舱内振动和噪声的效果。
技术实现要素:
[0003]
本发明的目的在于优化传统的螺旋桨相同步控制中相角处理过程,提出一种螺旋桨相同步控制中的相角处理逻辑,通过比较系统输入的相角指令与螺旋桨实际的工作相角值,判断当前螺旋桨相角的状态,对指令信息进行处理并输出螺旋桨相角的调整方式。这种相角处理逻辑能够提高相角调整的速度,减小控制螺旋桨达到指令相角的代价。
[0004]
设螺旋桨的叶片数目为n,则相角的范围是-(180/n)
°
~(180/n)
°
,定义相角范围的一半的角度即(180/n)
°
为半相角γ,无论叶片数目多少,相角的处理逻辑是相同的。将输入的指令相角记为α,工作相角记为β。
[0005]
判断当前螺旋桨相角的状态的具体过程如下:对工作相角和指令相角进行数值计算,将|α-β|≤γ时,螺旋桨的相角状态定义为状态1;|α-β|>γ时,螺旋桨的相角状态定义为状态2。
[0006]
对指令信息进行处理并输出螺旋桨相角的调整方式的具体过程如下:依据相角状态采用对应的指令处理方式。螺旋桨的相角为状态1时,按照默认的控制策略调整螺旋桨的相角,使从机的相角达到指令值,其相对角位移绝对值为|α-β|;而螺旋桨的相角为状态2时,其相对角位移绝对值为2γ-|α-β|,根据指令相角与工作相角的大小,分成两种情况:若α>β,采用减速方式使螺旋桨的相角持续减小直至越过相角范围的下限,跳变至范围上限,继续减速直至达到指令值。反之α≤β,则采用加速方式,使工作相角先越过相角范围的上限,跳变到相角范围的下限,继续加速直至使螺旋桨的相角达到指令值。
[0007]
本发明具有的明显优势:
[0008]
(1)指令逻辑优化了相角的控制路径,具有更小的相角控制的代价。
[0009]
(2)减小了在指令相角与工作相角相差较大时相角调整的相对角位移,被控螺旋桨的相角能更快达到指令相角。
附图说明
[0010]
图1角位移和相角的关系图。
[0011]
图2 6叶片螺旋桨的指令信号逻辑修正图,横轴表示指令相角,纵轴表示螺旋桨的工作相角。
[0012]
图3受控螺旋桨的相角状态判断及相角处理方式的示意框图。
具体实施方式
[0013]
下面结合图1-图3具体说明本发明的相角处理逻辑。
[0014]
螺旋桨相同步控制其重点在于对多个螺旋桨的相角的同步控制,选定一台发动机作为参考主机,保持转速恒定,其他几台发动机均为从机,追随主机的相角实现相同步控制。从机都需要从机接收相角控制指令,通过其转速调节使螺旋桨相角达到预定值。
[0015]
角位移为转速的积分,相角是描述多台螺旋桨之间关系的一种非线性的角度,与角位移的关系如图1所示。多叶片螺旋桨的相角范围与其叶片的数目有关,n个叶片的螺旋桨的相角范围是-(180/n)
°
~(180/n)
°
。已有的相角处理逻辑是在相角范围的上下限之间进行调节,即实际工作相角大于指令相角,进行减速使工作相角达到指令值;反之,加速调节相角达指令值。而结合图1,可知在相角的上限附近持续增大相角,则相角会跳变至下限,而后从下限继续增大;而在相角的下限附近持续减小相角,则相角会先跳变至上限,而后继续减小。现有的相角处理逻辑没有应用这一特性,当工作相角与指令相角差较大时,从机的螺旋桨到达预定相角的相对角位移也就会很大。那么对传统的相角处理逻辑依据相角特性进行优化,以减小螺旋桨相角调节的控制代价,是极为必要的。
[0016]
本发明的相角处理逻辑可应用于多叶片螺旋桨的相角处理。无论叶片数目多少,其方法相同,下面以6叶片螺旋桨为例来进行说明。
[0017]
(1)判断当前当前螺旋桨相角的状态。装配有6个叶片的螺旋桨,其相角范围为-30
°
~+30
°
。当指令相角与工作相角之差小于等于30
°
,即|α-β|≤30
°
,此时螺旋桨的相角状态为状态1,即图2中空白部分所表示的区域。当指令相角与工作相角之差小于等于30
°
,即|α-β|>30
°
,此时螺旋桨的相角状态为状态2,即图2中阴影部分所表示的区域。
[0018]
(2)如图3所示,当螺旋桨的相角状态为状态1时,按照传统的控制逻辑进行相角的调整,在控制过程中没有相角跳变,相对角位移为|α-β|,通过螺旋桨转速的增减来改变工作相角。若α>β,则通过加速使螺旋桨的相角持续增大直至达到指令值;反之,若α≤β,则通过减速使螺旋桨的相角持续减小直至达到指令值。
[0019]
(3)如图3所示,当螺旋桨的相角为状态2时,在控制过程中存在相角跳变,其相对角位移绝对值为60
°-
|α-β|,根据指令相角与工作相角的大小,分成两种:若α>β,采用减速使从机的相角持续减小直至越过相角范围的下限,跳变至范围上限,继续减速直至达到指令值;反之若α≤β,采用加速方式使螺旋桨的相角先越过相角范围的上限,跳变到范围的下限,继续加速直至达到指令值。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 关系逻辑
 热门咨询
热门咨询




tips