
 商标分类
商标分类  商标转让
商标转让 
一种双垂尾无人机方向舵操纵机构的制作方法
 2021-02-13 14:02:12|
2021-02-13 14:02:12| 255|
255| 起点商标网
起点商标网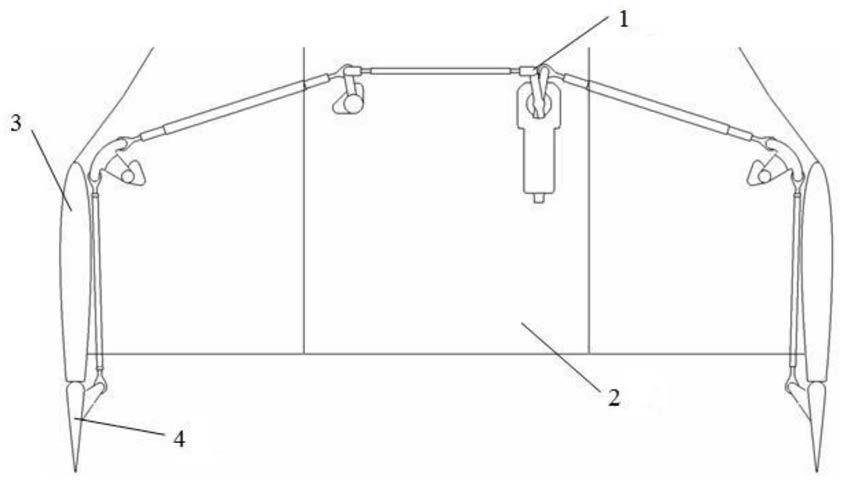
[0001]
本发明属于无人机领域,具体涉及一种双垂尾无人机方向舵操纵机构。
背景技术:
[0002]
方向舵操纵机构主要用于无人机航向控制,由舵机和传动机构等组成。
[0003]
中小型双垂尾布局无人机一般通过两套方向舵操纵机构实现无人机航向控制,即通过两个舵机和两套传动机构相应控制两个垂尾的方向舵,两个方向舵运动独立。传动机构主要由铝管材制造,重量及经济成本相对较小,而舵机由于要满足环境适应性及电磁兼容等要求,重量及经济成本相对较高。第一,此种方式采用两个舵机,使得方向舵操纵机构重量代价大,经济性差,可靠性低;第二,对于翼身融合体双垂尾布局中小型无人机来说,机翼空间有限,舵机布置存在一定的挑战;第三,两套方向舵操纵机构使得两个方向舵运动的同步性,一致性相对较低,难以满足高机动性和高航迹精度无人机的使用要求。
技术实现要素:
[0004]
要解决的技术问题:
[0005]
为了避免现有技术的不足之处,本发明提出的一种双垂尾无人机方向舵操纵机构,是一种简单可靠、同步性高的非对称布置单舵机方向舵操纵机构,实现无人机方向舵的操纵控制,提高无人机机身空间利用率。
[0006]
本发明的技术方案是:一种双垂尾无人机方向舵操纵机构,其特征在于:包括舵机、舵机摇臂、中央曲型拉杆、左双层摇臂、拉杆、转向摇臂、末端拉杆和销轴;所述中央曲型拉杆位于整个机构的中间位置,其两端分别与左双层摇臂的一端、舵机摇臂的一端铰接,所述左双层摇臂和舵机摇臂的另一端均依次连接有拉杆、转向摇臂、末端拉杆;
[0007]
所述左双层摇臂的一端为圆柱结构,固定于无人机机身上,另一端为横置的u型结构,u型端的两个支臂垂直于圆柱结构的轴向,其上端支臂与所述中央曲型拉杆一端通过销轴铰接,下端支臂通过销轴与第一拉杆铰接;
[0008]
所述舵机摇臂包括舵机摇臂左耳片、舵机摇臂右耳片和转轴,所述转轴与舵机连接;所述舵机摇臂左耳片和舵机摇臂右耳片的一端均固定于转轴上,并垂直于转轴的轴向;位于上方的舵机摇臂左耳片的另一端与中央曲型拉杆的另一端通过销轴铰接,位于下方的舵机摇臂右耳片通过销轴与第二拉杆铰接;
[0009]
所述舵机摇臂左耳片、中央曲型拉杆、左双层摇臂构成平行四连杆机构,使得左双层摇臂与舵机摇臂同步运动;所述舵机摇臂右耳片、第二拉杆、第二转向摇臂构成平行四连杆机构;所述左双层摇臂、第一拉杆、第一转向摇臂构成平行四连杆机构;位于两端的转向摇臂、末端拉杆分别与位于两侧的无人机方向舵构成四连杆机构。
[0010]
本发明的进一步技术方案是:安装于所述中央曲型拉杆两端的两个拉杆、两个转向摇臂和两个末端拉杆均以无人机机身的对称平面对称布置。
[0011]
本发明的进一步技术方案是:所述左双层摇臂和舵机摇臂相对于无人机机身对称
面对称。
[0012]
本发明的进一步技术方案是:所述转向摇臂为t型结构,t型结构的横向部分为圆弧结构,其两端分别设置有两个凸耳,通过销轴与拉杆、末端拉杆铰接;t型结构的竖向部分固定于无人机机身上。
[0013]
本发明的进一步技术方案是:所述中央曲型拉杆形状与机身型面一致,用于避开机身轴线空间的设备。
[0014]
本发明的进一步技术方案是:所述拉杆两端的铰接处分别设置有关节轴承。
[0015]
本发明的进一步技术方案是:所述拉杆为伸缩结构,其轴向长度能够调节。
[0016]
有益效果
[0017]
本发明的有益效果在于:
[0018]
1、重量轻,经济性好。方向舵操纵机构中舵机经济成本占总成本的90%以上,重量占总重量的70%以上。减少一个舵机节约经济成本约40%,减小重量约30%,单舵机有效减小了重量,节约了成本。
[0019]
2、空间利用率高,单舵机偏置布置,结合与机身型面一致的中央曲型拉杆形状,避开了机身对称轴线的空间,有效地提高了无人机空间利用率,有利于无人机设备的布置。
[0020]
3、两个方向舵运动同步性高。若采用两个舵机,由于舵机本身存在差异,即使控制信号一样,舵机输出也不一样,两个方向舵运动肯定不完全同步。单舵机控制使得两个方向舵驱动一样,仅有中央曲型拉杆连接间隙导致的差异,通过采用高精度配合,可使两个方向舵运动差异控制在1%以内,有利于提高无人机的机动性和航迹精度。
附图说明
[0021]
图1是本发明位置安装示意图;
[0022]
图2是本发明机构的正视图;
[0023]
图3是本发明机构中部等轴视图;
[0024]
图4是本发明机构转向摇臂等轴视图;
[0025]
图5是本发明机构舵机等轴视图;
[0026]
附图标记说明:1—一种双垂尾无人机方向舵操纵机构,2—翼身融合体,3—垂直安定面,4—方向舵,11—舵机,12—中央曲型拉杆,13—左双层摇臂,14—拉杆,15—转向摇臂、16—末端拉杆,17—销轴,21—舵机摇臂右耳片,22—舵机摇臂左耳片。
具体实施方式
[0027]
下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0028]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0029]
本发明涉及一种翼身融合体双垂尾布局中小型无人机方向舵操纵机构,尤其是一
种非对称布置单舵机双垂尾方向舵操纵机构,如图1所示。一种非对称布置单舵机双垂尾方向舵操纵机构1,包括舵机11、中央曲型拉杆12、左双层摇臂13、拉杆14、转向摇臂15、末端拉杆16、销轴17。
[0030]
参照图3所示,舵机11由舵机本体和舵机摇臂组成,摇臂为v形双层结构,包括舵机摇臂右耳片21和舵机摇臂左耳片22,左、右耳片位置相对固定,运动同步。左双层摇臂13包括上下两个耳片,上下两个耳片竖直方向处于同一平面(竖直方向即垂直于机身水平面方向),上耳片与舵机摇臂左耳片22处于同一高度,下耳片与舵机摇臂右耳片21处于同一高度。左双层摇臂13转动轴线与舵机11摇臂转动轴线相对机身对称平面对称。舵机11、左双层摇臂13固定于翼身融合体2内部。中央曲型拉杆12外形与翼身融合体2外形相似,处于翼身融合体2上部,通过销轴17与舵机11、左双层摇臂13连接。
[0031]
参照图4所示,转向摇臂15数量为两个,对称固定于翼身融合体2两端。拉杆14两端采用关节轴承结构,第二拉杆14一端与舵机摇臂右耳片21通过销轴17连接,另一端与转向摇臂15通过销轴17连接;第一拉杆14一端与左双层摇臂13下耳片通过销轴17连接,另一端与转向摇臂15通过销轴17连接。末端拉杆16数量为两个,末端拉杆16两端亦采用关节轴承结构,一端与转向摇臂15通过销轴17连接,另一端与方向舵4连接。方向舵4固定于垂直安定面3。
[0032]
无人机通过机载计算机控制方向舵舵机,方向舵舵机驱动方向舵操纵机构实现方向舵的偏转,左右方向舵运动同步,偏转角度一致。
[0033]
本发明的上述实施方式不能认为是对本发明权利要求所作的限制,如果本领域的技术人员通过本发明的启发不需要创造性的劳动做出相应的变化,都应该落入本发明权利要求的保护范围内。
[0034]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips