
 商标分类
商标分类  商标转让
商标转让 
用于低噪音交付物品的无人机的制作方法
 2021-02-13 14:02:50|
2021-02-13 14:02:50| 292|
292| 起点商标网
起点商标网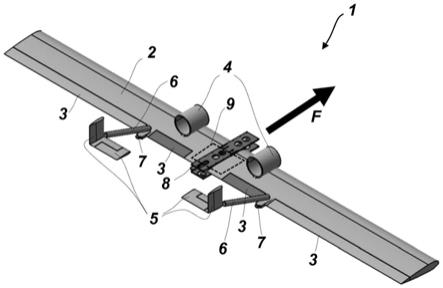
[0001]
本发明涉及用于交付物品的无人机、用于固定翼式无人机的起飞着陆装置、由无人机和起飞着陆装置组成的系统以及用于所述系统的进场方法。
背景技术:
[0002]
从现有技术中已知用于包裹交付的无人机。借助无人机的包裹交付的巨大优点是显而易见的。首先,它们是极其快速的。无人机能飞笔直路线,不必长期减速和加速,不会拥堵并且是能效很高的。所有的无人机概念相比于自动交付是很环保的,因为它们是电动飞行的,不会排出二氧化碳、炭黑颗粒或有毒气体,不具有橡胶磨损并且尤其是未占用不利环境的道路,或甚至减轻其负担。无人机不仅显著缩短了交付时间,也还尽量降低了交货企业方的成本,因为需要更少的人。
[0003]
多轴直升机式无人机可以几乎无限制地按照规定空间就位。但是,它们产生巨大的飞行噪声,这尤其在起飞、着陆和悬浮时产生。夜间供货由此在一开始就被排除。包裹交付多轴直升机是已知的,它在接收者处在其处于接收位置上方时用绳索吊下包裹。该解决方案带来安全危险,因为有些狗可能袭击放下的包裹或咬住绳索并且使无人机坠落。
[0004]
除了多轴直升机式无人机外,也存在所谓的固定翼,即平面型或无尾飞机。经典飞机形状的优点是作用范围,因为飞机为了升力几乎不耗能,这不同于须永久通过转子产生升力的多轴直升机。缺点是固定翼不像多轴直升机那样可以机动,即它无法任意慢飞,在空中悬停或甚至倒飞。存在用于包裹交付的固定翼无人机,其中,包裹能以小的降落伞在着陆区高度被卸下。
[0005]
在所述示例中,只有开放区域、花园或平屋顶适合作为接收地点,其中,只有很少的人员具备这种接收地点。城市里生活的人们只能在能到达屋顶的情况下才被供货。此外,第三方能够相对容易地拿到所卸下或用绳索吊下的包裹。
[0006]
而且已知的解决方案还需要大量的空间来日常存放无人机,以便例如为其电池充电或执行维护工作。由于无人机空中业务越来越多,所发出的嘈杂声音对于社会健康也是麻烦因素。
技术实现要素:
[0007]
本发明涉及一种用于交付物品的固定翼无人机,其包括:机翼,其具有翼面和机翼控制面;至少两个驱动单元;至少一个机尾组件,其具有机尾控制面,其中该机尾组件通过与机翼相连的支承件布置在所述机翼上方和后方;至少一个向后突出的且能从后方接近的结构件;物品保持装置,其布置在机翼上方并且被设计成容放物品;控制单元,其被设计成基于控制信号控制该固定翼无人机、尤其是所述机翼控制面、机尾控制面和驱动单元;以及接收单元,其被设计成接收控制信号。
[0008]
所述驱动单元可以具有环绕的螺旋桨、尤其是叶轮。
[0009]
各接合件可以被设计为滑动件或可转动安装的盘。
[0010]
物品保持装置可以具有输送系统,其被设计成向前或向后输送由物品保持装置容放的物品,以便尤其是将物品送至机翼前方或后方并且在机翼前方或后方弹出物品,或者以便在飞行中改变重心。
[0011]
固定翼无人机还可以具有摄像头系统,其被设计用于物品识别,其中,控制单元还被设计成基于该物品识别来控制该固定翼无人机。
[0012]
本发明还涉及一种起飞着陆装置,其具有以下部分:(a)安放装置,其被设计成将起飞着陆装置安放在一个结构、尤其是结构的竖向侧面上,(b)导向件,其连接至该安放装置并且被布置成,使得它从安放装置起相对于竖直方向向下并以在1
°
至89
°
之间、尤其是12
°
的角度延伸离开该结构,(c)保持件,其横向于尤其是水平地安装在导向件上并且具有至少一个可从上方接近的对接结构件。
[0013]
起飞着陆装置还可以具有至少一个起飞导向件,其连接至安放装置并且从安放装置起相对于竖直方向以在1
°
至89
°
之间的角度向上远离结构延伸。
[0014]
起飞着陆装置还可以具有物品抓持装置,尤其是在这里,安放装置包括该物品抓持装置。
[0015]
起飞着陆装置还可以具有固定装置,其尤其具有被设计成提供吸力以吸持固定翼无人机的电磁体,或者具有机械紧固机构。
[0016]
本发明还涉及一种系统,其具有固定翼无人机和根据在此说明的起飞着陆装置。
[0017]
固定翼无人机的结构件和对接结构件此时优选被设计成可相互联锁,并且固定翼无人机优选借助相互联锁的结构件和对接结构件可沿着保持件移动。
[0018]
起飞导向件可以被设计为夹紧装置,其可以在打开状态和闭合状态之间转动,其中该夹紧装置在打开状态下从安放装置起相对于竖直方向以在1
°
至89
°
之间的角度向上延伸远离该结构,并且在闭合状态下直到顶靠所述保持件或导向件,其中该夹紧装置是电动的或者在预紧作用下可被置于打开状态并且在着陆的固定翼无人机触发下提供夹紧机制,其中该夹紧装置被设计成尤其在机翼处夹紧已着陆的固定翼无人机。
[0019]
起飞着陆装置可以包括光导系统,其具有至少一个发光件或反光器,其中,摄像头系统被设计成识别该发光件或反光器,其中,控制单元被设计成依据所识别出的发光件或反光器确定起飞着陆装置的姿态并且依据所确定的姿态来生成控制信号。
[0020]
固定翼无人机还可以具有接口,该接口被设计成接收电能和/或数据,其中,起飞着陆装置具有相应的对接接口,该对接接口被设计成向固定翼无人机供应电能和/或数据。
[0021]
本发明还涉及一种用于根据在此说明的系统的进场方法。该进场方法至少包括以下步骤:
[0022]-给固定翼无人机装载物品,
[0023]-基于接收到的控制信号朝向交货地点控制该固定翼无人机,直至剩下距交货地点的规定剩余距离,
[0024]-在到达剩余距离之后停用驱动单元,
[0025]-启动安装在一结构上的起飞着陆装置的光导系统,
[0026]-利用摄像头系统识别发光件或反光器,
[0027]-依据所识别出的发光件或反光器,利用控制单元确定起飞着陆装置的姿态,
[0028]-依据所确定的姿态,利用控制单元生成控制信号,
[0029]-基于所生成的控制信号仅控制处于滑翔飞行中的固定翼无人机的机翼控制面和机尾控制面,
[0030]-执行着陆进场,此时该固定翼无人机暂时降低到起飞着陆装置下方并接着以抛物线形式又升高到起飞着陆装置,
[0031]-该固定翼无人机在该起飞着陆装置处相对于竖向方向进入停止状态,
[0032]-由于重力导致该固定翼无人机降落至起飞着陆装置上的静止位置,其中,该固定翼无人机的结构件和该起飞着陆装置的保持件的对接结构件相互联锁。
[0033]
在一个实施方式中,物品保持装置布置在驱动单元之间。
[0034]
在一个实施方式中,夹紧装置是电动的,并且在另一实施方式中,它(例如手动)在预紧力作用下可被置于打开状态并且在着陆的无人机的触发下提供夹紧机制。夹紧装置可以被设计成夹紧已着陆的无人机,尤其是其中,该夹紧装置具有至少一个夹紧件,其在闭合状态下利用保持件夹紧无人机的机翼。
[0035]
该保持件尤其被成形为,使得无人机借助可移动的接合件自稳定、尤其是自对中其在保持件上的位置。
[0036]
起飞着陆装置也可以包括光导系统,其具有至少一个发光件或反光器。
[0037]
该发光件和/或反光器优选设置在导向件、可能是起飞导向件以及保持件上。
[0038]
输送系统可以被设计成在无人机静立在起飞着陆装置上时将由物品保持装置容放的物品送入物品抓持装置。
[0039]
所述机械紧固机构例如可以包括钩,其插入可选地无人机所包含的环圈中。
[0040]
在一个实施方式中,起飞着陆装置具有弹出装置,其为了无人机起飞而被设计成利用弹射冲量使无人机偏离竖向结构,尤其是其中,该弹出装置包括极性可逆的电磁体,其被设计成可与无人机所包含的铁磁性对应构件相互作用,和/或其中该弹出装置提供机械弹出机构。
[0041]
当提到“上方”时,这涉及常规飞行时的无人机取向。当提到“下方”、“前方”或“前”时,则这还涉及常规飞行时的无人机飞行方向。在常规飞行时机翼如此取向,即,使其轮廓产生升力。
附图说明
[0042]
可从详细说明和附图中清楚知晓本发明的其它优点。
[0043]
图1示出根据本发明的无人机的一个实施方式;
[0044]
图2从前方示出根据本发明的起飞着陆装置的一个实施方式;
[0045]
图3从后方示出根据图2的起飞着陆装置;
[0046]
图4从前方示出根据图2的起飞着陆装置连同静立在其上的根据图1的无人机;
[0047]
图5以侧视图示出图4的布置以及利用无人机运输的物品的卸出;
[0048]
图6示出根据图1的无人机着陆到根据图2的起飞着陆装置上。
具体实施方式
[0049]
根据本发明,无人机在起飞着陆装置上的着陆进场几乎可以无声地进行。这也允许在安静时间如在夜晚供货。可选的光导系统5可以支持夜晚着陆。另外,通过提供起落站,
增加了用于无人机包裹供货的目标组。因此,与需要开放区域或平屋顶的其它构想相比,例如阳台、窗户和/或房屋正面能接近的通道就足够了。另外,第三方也无法接近包裹或无人机,因此可以保证可靠的交付。
[0050]
根据本发明的无人机可以飞行很长的距离,因为它也像其它平面型一样容许很高效的巡航。无人机可以被固定在客户处的墙壁上并进行充电,因此不一定需要用于无人机常规存放的昂贵的后勤中心。在客户处的“停放位置”也可以被视为分散网络。因此,无人机也可以根据召唤直接飞到例如需要取包裹的另一位客户那里。
[0051]
图1示出了根据本发明的固定翼无人机1(以下称为无人机)的一个实施方式,其具有机翼2、机翼控制面3、驱动单元4和两个机尾组件5,这两个机尾组件5分别通过支承件6连接至机翼。支承件6在机翼2的后方和上方定位机尾组件5,其中,“后方”涉及飞行方向f,“上方”涉及飞行期间的取向(即,图1从上方的鸟瞰图示出无人机)。如图所示,机翼控制面3包括横向舵和盖板。机尾组件5也包括升降舵和方向舵。
[0052]
驱动单元4在此具有叶轮或环绕的螺旋桨并且借助电池被电力驱动。虽然示出在机翼2上,但驱动单元4也可以被集成在机翼中。叶轮在此是相比于螺旋桨减小噪声的改善方案。
[0053]
无人机在机翼2的后边沿处具有两个结构件7,其可从后方接近。示出了呈可转动安装的轮子或盘的形式的结构件7。另外,无人机1具备物品保持装置8,包裹或其它寄送物能被固定在其上以便运输。
[0054]
在其它实施方式中,所述至少一个结构件能一方面可以不同地形成为例如凸耳、叉、钩、环圈、滑块或槽,另一方面能安置在其它地方,例如安装在机翼的上方或下方或者安装在物品保持装置8上。在此,控制单元例如安装在机翼2中或机翼2上的无人机机载电脑9中。通过控制单元,无人机可以被人工遥控和/或自主运行。也被包含在机载电脑9中的接收单元可以例如通过无线电技术如无线lan或移动网络接收控制信号。机载电脑9还具有电池用于向接收单元、控制单元和驱动单元4供应电流或用于驱动机翼控制面3和机尾组件5。
[0055]
物品保持装置8可以可选地具有输送系统,借此可以将包裹输送到机翼前方或后方,接着在那里被弹出或掉落。
[0056]
无人机1还可以具有摄像头系统,其至少能与控制单元相互作用。摄像头系统的至少一个摄像头拍摄无人机的周围环境,并且摄像头系统被配置成对所拍摄的周围环境进行分析,其中尤其采用物品识别算法。摄像头系统可以至少基于这些算法来控制无人机1。所述至少一个摄像头优选安装在机翼的前边沿或底面上。
[0057]
无人机1也优选尤其在机载电脑9中具有导航单元。该导航单元在此包括全球导航卫星系统(gnss)接收器、惯性测量单元(imu)和/或用于确定无人机1的空间位置和取向的其它仪器。
[0058]
图2示出了根据本发明的起飞着陆装置10的一个实施方式。该起飞着陆装置10被设计成使得它可以被安装在窗户前、房屋正面前或阳台的栏杆外侧g1上。该起飞着陆装置也可以安装在附加支架上,该附加支架被安装在屋顶或栅栏上。简言之,起飞着陆装置10具有安放装置11,起飞着陆装置10可借此被安装在一个结构上。
[0059]
起飞着陆装置10还具有两个导向件12,它们在此分别具有两个杆,但也可以具有不同的设计,例如设计成板或宽杆状。导向件12可以自由接近(即它们背对结构g1)并且被
布置成,使得它们从安放装置11相对于竖向结构以至少1
°
、尤其是12
°
或6
°
但直至89
°
的角度向下延伸。保持件13横向安装在导向件12上并且因此水平延伸。保持件13具有对接结构件,其可从上方接近。对接结构件尤其与无人机的结构件7相匹配。因此,对接结构件在此是沿保持件13的槽形缺口25,图1的无人机的两个轮子7能钩卡或卡锁在该缺口中并且尤其是也能在其中滚动。
[0060]
在此所示的起飞着陆装置10附加地还具有起飞导向件14。在另一个实施方式中,起飞导向件14在所示位置中被固定不动地安装在安放装置11和/或导向件12上。但作为可选的附加功能,起飞导向件14同时起到夹紧装置的作用,其可转动地被固定在安放装置11和/或导向件12上。夹紧装置(=起飞导向件)14尤其具备快速卡锁机构或者电动装置用于在关闭状态下固定无人机(在此示出打开状态)。另选地,该夹紧装置也可以被手动置于打开状态和闭合状态并在那里被相应锁定。
[0061]
作为可选的附加功能,起飞着陆装置还具有插接站19。该插接站提供充电电流和/或单向或双向数据通信。插接站的接口适配于对应的(也是可选的)无人机1接口,即该接口可以是基于插头的或者可以是有线或无线的(感应充电、nfc、蓝牙、wifi等)。
[0062]
图3示出了示例性安放装置11的背面,其在此也具有可选的物品抓持装置15,该物品抓持装置15可以与无人机1的可选的输送系统合作,即,该物品抓持装置15被设计成使得它能抓住被输送系统弹出的包裹。在此情况下,物品抓持装置15是捕获篮;但它也可以被设计成捕获网或捕获槽。在所示例子中,物品抓持装置15位于也在图2中被示出的栏杆的栏杆内侧g2上。但在其它实施方式中,物品抓持装置也可以设置在其它地点,比如在安放装置11上方或导向件12下方。
[0063]
图4示出了图1的无人机1如何静立在起飞着陆装置10上。因为导向件相对于竖直方向以在1
°
与89
°
之间、尤其是12
°
或6
°
的角度倾斜,静立于起飞着陆装置10上的无人机1不会向后倾翻。为此,无人机1的重心也相应地被配置成尽量在下方,在这里,“下方”在此再次涉及正常飞行时的取向。
[0064]
但在其它实施方式中,重心位置不一定必须被配置成仅通过该构造来防止处于停放位置的无人机1的倾翻,因为起飞着陆装置10可以附加地如上所述具有夹紧装置14(如在图4的闭合状态下示出的)和/或吸持单元,其例如具有一个电磁体或一个永磁体并且被设计成提供磁吸力来吸持无人机1。为此,无人机1于是在相对于吸持单元的规定位置具有相应的铁磁性对应构件(尤其是也是(电)磁体)。作为起飞导向件14的补充或替代或者作为夹紧装置14的补充或替代,可以设置这样的吸持单元。
[0065]
无人机1以其结构件7安放在保持件13上。在此情况下,呈轮子状的结构件嵌入设立于保持件13的顶面上的(在此设计成槽状的)对接结构件中。在其它实施方式中配置反过来:保持件13上的对接结构件20具有多个串列布置的轮子,或者简单地只具有一个光滑转轮,而无人机1上的结构件7被设计成叉或桥,其中这两个元件还是相互联锁。在另外一些实施方式中,保持件13可以是一种具有可从上方接近的开口的“兜袋”,其中,无人机的结构件7被形成为一种“舌片”,其可很容易地插入兜袋中并且具有空间容差。
[0066]
作为可选的附加扩展,轮子(=结构件)7可以沿逐渐变细的弧形轨道(=保持件)13滚动和/或滑动,使得无人机能够自行居中定位。
[0067]
如果无人机已经安全着陆,如图6的侧视图所示,则物品保持装置8可以包含可选
的输送系统以便向上抛出待供应的物品o,使得它能落位在物品抓持装置15中(o')。
[0068]
图6示出示例性着陆进场,此时可以关闭无人机的驱动单元以实现噪音保护。起飞着陆装置10被安装在阳台b上。无人机运动轨迹(虚线)表明无人机暂时已降低得足够低以使其处于起飞着陆装置10的下方。接着,控制无人机10,使其再升起并最终以合适的角度顶靠或贴靠导向件12,此时该无人机几乎没有剩余动能并慢慢下降。然后,结构件7与保持件上的对接结构件啮合。
[0069]
在考虑许多因素例如风和装载重量的情况下,计算至着陆点的飞行路径,以便正好在无人机略微高于图4和图5所示的位置时降低动能冲力、尤其是竖向动能。可选的光导系统可以辅助该动作;因此,具备摄像头系统的无人机可以更可靠地且尤其是在晚上也能识别出起飞着陆装置10的姿态。光导系统可以具有发光二极管或反光器(为此,无人机也可以包括相应的光源),它们在图2和图6中用附图标记17并且在图6中用附图标记18被示出。
[0070]
在快要着陆时,夹紧装置14伸出。在伸出或打开状态下,可以通过显示器或报警灯向阳台b内侧或者向通往阳台的窗户发出警报,例如带有“请退后”字样。在伸出状态下,光导系统也优选是起作用的,以便无人机在晚上能像在白天一样找到着陆架并因此特殊的着陆方法可以完全自主地得以更好地应用。在无人机着陆期间,起飞导向件14保护可能待在阳台上的人并同时扩大用于无人机的着陆面积。与此相应,无人机的首次接触也完全可以在上方在在此设计成夹紧装置的起飞导向件14处进行,其接着下滑直至无人机以轮子7停在轨道13(=保持件)上。
[0071]
由于轨道13在两侧倾斜,因此无人机会自行居中。可选地可以在轨道拐弯处设有小切口,无人机可以在该位置处卡锁入其中。一旦无人机被卡锁,夹紧装置14闭合并且在其与导向件12之间夹紧无人机。因此,无人机被保护以免风暴或其它影响并且不会再移动。
[0072]
当无人机1最终被卡锁时,它能以数据线和/或电线或以无线方式对接至可选的插接站19(见图2)。如果物品抓持装置15还应该是满装的或图5的机构出于其它原因无法执行,则可以发送消息通知客户要取包裹。
[0073]
在所示变型中,起飞着陆装置还被设计成优选的起飞过程。在起飞导向件14的打开位置中,它们可以被无人机近似用作斜坡,借此保证更可靠地从阳台或墙壁起飞。在另一个变型中,所述弹出也可以穿过磁力实现,在这里,为此在起飞着陆装置上设置弹出装置。但这种弹出装置也能以机械方式发挥作用,即例如预紧的弹出件在特定时刻弹出无人机。但在另一个实施方式中,无人机也可以完全自身“弹出”,做法是所述机翼控制面和机尾组件被简单地相应控制以赋予无人机所需的升力。
[0074]
无人机优选具有完全平坦的底面。不需要无人机按点精确地着陆,它们可以着陆在导向件12(和或许起飞导向件14)与保持件13之间的整个面5上。无论无人机着陆在表面上的什么位置,它都会先至少由于重力而向下滑动,直到轮子(=结构件7)到达被设计为轨道的保持件13并且在其中啮合到对接结构件中。接通的电推进器4(=驱动单元)能可选地减缓下滑或者修正偏离理论的着陆位置。由于轨道(=保持件)13相对于竖直方向有斜度、轨道(外臂)有拐弯并且无人机有平坦底面,因此无人机在所示示例中可以在轨道上横向运动并自行居中定位。但如果这不起作用,例如因为风的影响一直很大,则可以通过电推进器(=驱动单元)4和控制面在无人机居中定位时加以辅助。
[0075]
在一个优选实施方式中,无人机被设计成具有受保护(包罩)的电推进器4,以使得
回转部分不是浮动的并且因此在任何情况下减小损伤危险。另外将明显减小发出嘈杂声。安放在无人机顶面上的推进器4还容许巡航中的较高升力并且减小向下的嘈杂声。但其它安放位置也是可行的。
[0076]
在巡航中,可被设计成输送系统的物品保持装置8可以被用于将包裹o向前移或向后移并理想地调节整个结构的重心。
[0077]
无人机1优选配备有多个小型摄像头(作为摄像头系统的一部分),以便识别并避让其它飞行物从而能精确地飞行着陆并在起飞前检查是否有障碍物。
[0078]
无人机1在悬停飞翔中以陡角飞向着陆点,此时推进器(=驱动单元)4被关闭。摄像头系统通过接通的光导系统在视频图像中识别起飞着陆装置10位于哪里。依据视频图像中的起落架尺寸,无人机可以测定距着陆点的距离。无人机的姿态可以在内部通过imu来确定并且与此相应可以查明相对于着陆点的水平角度和竖直角度。
[0079]
从相对于着陆架的一定距离和角度起开始着陆弧线,着陆弧线被调节成,使得无人机能以正确角度和正确高度落在起飞着陆装置10上。在此,悬停飞翔的能量就足够了,而不用再次接通驱动单元。在此情况下,无人机无声着陆。此时要考虑许多因素以便实现无声着陆,例如像包裹重量、包裹尺寸、风速、风向、温度、高度等。
[0080]
虽然已经依据其优选实施方式描述了本发明,但在不超出本发明的范围的情况下还是可以采取许多其它的改动和变化。因此规定,所附的权利要求书涵盖了包含在本发明的实际范围内的改动和变化。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips