
 商标分类
商标分类  商标转让
商标转让 
一种长巡航能力多旋翼无人机的制作方法
 2021-02-13 14:02:30|
2021-02-13 14:02:30| 211|
211| 起点商标网
起点商标网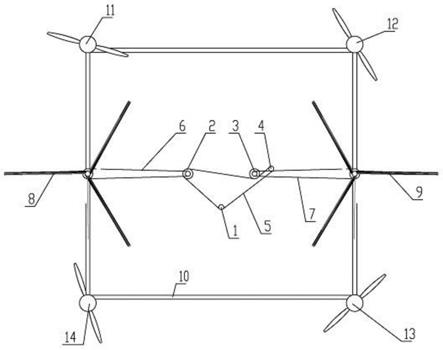
[0001]
一种长巡航能力多旋翼无人机,属于无人机技术领域,尤其涉及一种多旋翼无人机。
背景技术:
[0002]
在无人机技术领域,由于传统的多旋翼无人机基本上采用电机作旋翼的驱动动力,巡航时间大约在半小时左右。且升力不大,效率较低。油动发动机的连续工作时间较长,但精准控制转速比较困难。
技术实现要素:
[0003]
本发明是为了克服上述传统的多旋翼飞行器的缺陷,提供了一种高升力、高效率、续航能力强的多旋翼飞行器。
[0004]
一种长巡航能力多旋翼无人机,包括主旋翼动力装置、电动四旋翼组件、飞行控制器和机架。
[0005]
主旋翼动力装置包括发动机、主动链轮、第一从动链轮、第二从动链轮、张紧链轮、主链条、左链条、右链条、左主旋翼、右主旋翼。
[0006]
电动四旋翼组件包括电池、左前带电机的螺旋桨、右前带电机的螺旋桨、右后带电机的螺旋桨、左后带电机的螺旋桨。电动四旋翼组件结构和控制原理与常规的四旋翼飞行器相同。左前带电机的螺旋桨、右前带电机的螺旋桨、右后带电机的螺旋桨和左后带电机的螺旋桨的用途是用来产生一部分升力和配合飞行控制器进行飞行姿态的控制。
[0007]
第一从动链轮和第二从动链轮的结构和大小均相同。主链条围绕主动链轮、第一从动链轮和张紧链轮形成了一个闭环;主链条将主动链轮、第一从动链轮和张紧链轮包围在内部;第二从动链轮压在主链条的外表;主链条在第一从动链轮和第二从动链轮上采用了s形缠绕方式;张紧链轮将主链条压在第二从动链轮上,使主链条能与第二从动链轮有足够的接触面;主动链轮是动力轮,主动链轮与发动机的输出轴相连;发动机采用内燃机,发动机安装在机架的中部。主动链轮、第一从动链轮、第二从动链轮和张紧链轮通过轴承套装在各自的转动轴上,所有转动轴均安装在机架上。左链条的一端与左主旋翼转轴上的链轮相连,左链条的另一端与第一从动链轮的轴下端设置的链轮相连,左链条将第一从动链轮的动力传递给左主旋翼;同理,右链条的一端与右主旋翼转轴上的链轮相连,右链条的另一端与第二从动链轮的轴下端设置的链轮相连,右链条将第二从动链轮的动力传递给右主旋翼。左链条和右链条结构相同左右对称布置。左主旋翼和右主旋翼转速结构相同,左右对称布置,左主旋翼和右主旋翼转速相同,转向相反。本多旋翼飞行器的大部分升力由左主旋翼和右主旋翼产生。
[0008]
上述多旋翼飞行器的工作原理是:发动机驱动主动链轮转动,主动链轮带动主链条运动,主链条拖动第一从动链轮和第二从动链轮转动,由于第一从动链轮和第二从动链轮的结构和大小均相同,且主链条在第一从动链轮和第二从动链轮上采用了s形缠绕方式,
主链条带动第一从动链轮和第二从动链轮转动的转速相同,转向相反,即如果第一从动链轮逆时针方向转动,则第二从动链轮顺时针方向转动。并通过左链条和右链条分别带动左主旋翼和右主旋翼旋转产生主要升力。由电池驱动左前带电机的螺旋桨、右前带电机的螺旋桨、右后带电机的螺旋桨、左后带电机的螺旋桨转动,在飞行控制器的控器下电动四旋翼组件产生一部分升力和进行飞行姿态的控制。
[0009]
本发明采用了油电混动的模式,使得其续航能力强,效率高,且相对安全。由于主链条采用s形缠绕方式,使第一从动链轮和第二从动链轮的转向相反,相比齿轮传动方式来说有噪音低、重量轻、转动中心距长的优点。
附图说明
[0010]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍。
[0011]
图1是本发明的结构原理示意图。
[0012]
图中,1-主动链轮,2-第一从动链轮,3-第二从动链轮,4-张紧链轮,5-主链条,6-左链条,7-右链条,8-左主旋翼,9-右主旋翼,10-支架,11-左前带电机的螺旋桨,12-右前带电机的螺旋桨,13-右后带电机的螺旋桨,14-左后带电机的螺旋桨。
具体实施方式
[0013]
现结合附图对本发明加以具体说明:一种长巡航能力多旋翼无人机,包括主旋翼动力装置、电动四旋翼组件、飞行控制器和机架。
[0014]
主旋翼动力装置包括发动机、主动链轮1、第一从动链轮2、第二从动链轮3、张紧链轮4、主链条5、左链条6、右链条7、左主旋翼8、右主旋翼9。
[0015]
电动四旋翼组件包括电池、左前带电机的螺旋桨11、右前带电机的螺旋桨12、右后带电机的螺旋桨13、左后带电机的螺旋桨14。电动四旋翼组件类似常规的四旋翼飞行器。左前带电机的螺旋桨11、右前带电机的螺旋桨12、右后带电机的螺旋桨13和左后带电机的螺旋桨14的用途是用来产生一部分升力和配合飞行控制器进行飞行姿态的控制。
[0016]
第一从动链轮2和第二从动链轮3的结构和大小均相同。主链条5围绕主动链轮1、第一从动链轮2和张紧链轮4形成了一个闭环;主链条5将主动链轮1、第一从动链轮2和张紧链轮4包围在内部;第二从动链轮3压在主链条5的外表;主链条5在第一从动链轮2和第二从动链轮3上采用了s形缠绕方式;张紧链轮4将主链条5压在第二从动链轮3上;主动链轮1是动力轮,主动链轮与发动机的输出轴相连;发动机采用内燃机,发动机安装在机架的中部。主动链轮1、第一从动链轮2、第二从动链轮3和张紧链轮4通过轴承套装在各自的转动轴上,所有转动轴均安装在机架上。左链条6的一端与左主旋翼8转轴上的链轮相连,左链条6的另一端与第一从动链轮2的轴下端设置的链轮相连,左链条6将第一从动链轮2的动力传递给左主旋翼8;同理,右链条7的一端与右主旋翼9转轴上的链轮相连,右链条7的另一端与第二从动链轮3的轴下端设置的链轮相连,右链条7将第二从动链轮3的动力传递给右主旋翼9。左链条6和右链条7结构相同左右对称布置。左主旋翼8和右主旋翼9转速结构相同,左右对称布置,左主旋翼8和右主旋翼9转速相同,转向相反。本多旋翼飞行器的大部分升力由左主旋翼8和右主旋翼9产生。
[0017]
上述多旋翼飞行器的工作原理是:发动机驱动主动链轮1转动,主动链轮1带动主链条5运动,主链条5拖动第一从动链轮2和第二从动链轮3转动,由于第一从动链轮2和第二从动链轮3的结构和大小均相同,且主链条5在第一从动链轮2和第二从动链轮3上采用了s形缠绕方式,主链条5带动第一从动链轮2和第二从动链轮3转动的转速相同,转向相反,即如果第一从动链轮2逆时针方向转动,则第二从动链轮3顺时针方向转动。并通过左链条6和右链条7分别带动左主旋翼8和右主旋翼9旋转产生主要升力。由电池驱动左前带电机的螺旋桨11、右前带电机的螺旋桨12、右后带电机的螺旋桨13、左后带电机的螺旋桨14转动,在飞行控制器的控器下电动四旋翼组件产生一部分升力和进行飞行姿态的控制。
[0018]
本发明采用了油电混动的模式,使得其续航能力强,效率高,且相对安全。由于主链条采用s形缠绕方式,使第一从动链轮和第二从动链轮的转向相反,相比齿轮传动方式来说有噪音低、重量轻、转动中心距长的优点。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips