
 商标分类
商标分类  商标转让
商标转让 
一种高通用性大装载小型无人飞行器的制作方法
 2021-02-13 13:02:44|
2021-02-13 13:02:44| 260|
260| 起点商标网
起点商标网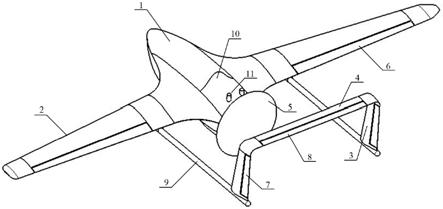
[0001]
本发明实施例涉及飞行器技术,尤其涉及一种高通用大装载小型无人飞行器。
背景技术:
[0002]
小型固定翼无人机在我国军用、民用领域应用广泛。例如在军用领域,可用于战场侦察、情报搜集、信息支援等;在民用领域,可用于交通巡视、资源勘查、农林植保等。虽然无人机技术日益成熟,但目前小型固定翼无人机,多数都是针对其特定用途,在特定飞行环境下携带特定任务载荷进行实际作业。当面临地理环境、任务需求、任务载荷等外界因素的不确定性变化时,任务载荷几何尺寸的限制、起飞场地环境的约束以及留空作业时间要求的提高等因素的制约将会明显降低现有小型固定翼无人飞行器对飞行任务的适应能力和执行能力,进而一定程度上限制了无人飞行器更为广泛的应用。
技术实现要素:
[0003]
针对现有技术中的上述缺陷,本发明提供一种高通用大装载小型无人飞行器,能够根据地理环境和任务需求的变化,相应进行弹射起飞、滑跑起飞或者垂直起降;同时,翼身融合大容积机身能够同时搭载多种较大几何尺寸的任务载荷,对飞行任务的适应能力和执行能力得到显著增强。
[0004]
本发明提供一种高通用性大装载小型无人飞行器,包括:
[0005]
翼身融合大容积机身,设置在所述机身中部的大容积油箱,燃油重量系数最大可达0.5,设置在所述机身两侧的两个固定主机翼,设置在所述机身尾部的尾推式螺旋桨,设置在主机翼下方的两个长度相等的撑杆以及设置在撑杆后端的尾翼组件,并且全机具有弹射起飞、滑跑起飞和垂直起降三种起飞模式。
[0006]
所述主机翼沿所述机身纵向轴线对称分布在所述机身两侧,在所述机翼后缘,对称设置有一体式襟副翼。
[0007]
所述两个长度相等的撑杆沿所述机身纵向轴线对称设置在所述主机翼下方且靠近所述主机翼翼根位置处。
[0008]
所述撑杆后端沿所述机身纵向轴线对称设置有两个垂直尾翼,两个垂直尾翼后缘对称设置有方向舵。
[0009]
所述两个垂直尾翼的翼尖通过水平尾翼进行连接,所述水平尾翼后缘设置有升降舵。
[0010]
所述两个垂直尾翼与水平尾翼组成模块化尾翼组件,与所述撑杆可拆卸连接。
[0011]
可选地,所述主机翼为平直翼、梯形翼或后掠翼。
[0012]
可选地,所述主机翼相对机身安装位置为上单翼、中单翼或下单翼。
[0013]
可选地,发动机可内置于机身尾部或者外露,当内置于机身时,机身背部将设置有进气道。
附图说明
[0014]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。应当理解,下面描述中的附图是本发明的一些实施例,用来提供对本发明的进一步理解而并不构成对本发明的限制。
[0015]
图1为本发明实施例提供的高通用性大装载小型无人飞行器弹射起飞模式下的结构示意图;
[0016]
图2为本发明实施例提供的高通用性大装载小型无人飞行器弹射起飞模式下结构部件组装示意图
[0017]
图3为本发明实施例提供的高通用性大装载小型无人飞行器垂直起降模式下的结构示意图;
[0018]
图4为本发明实施例提供的高通用性大装载小型无人飞行器垂直起降模式下结构部件组装示意图
[0019]
附图标记说明:
[0020]
1:机身;2:主机翼;3:垂直尾翼;4:水平尾翼;5:尾推式螺旋桨;6:襟副翼;7:方向舵;8:升降舵;9:撑杆;10:进气道;11:排气管;12:前置升力螺旋桨;13:后置升力螺旋桨
具体实施方式
[0021]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明保护内容。
[0022]
本实施例提供的高通用大装载小型无人飞行器具有弹射起飞、滑跑起飞、垂直起降三种起降模式。图 1为本发明实施提供的一种高通用大装载小型无人飞行器弹射起飞模式下的结构示意图。图1提供的一种高通用性大装载无人飞行器包括:机身1、主机翼2、垂直尾翼3、水平尾翼4、尾推式螺旋桨5、襟副翼 6、方向舵7、升降舵8、撑杆9。机身1与主机翼2,主机翼2与撑杆9以及撑杆9与垂直尾翼3均可进行拆卸连接以便于运输,其结构部件组装示意图如图2所示。
[0023]
主机翼2对称设置在机身1两侧,撑杆9设置在两个主机翼下方且靠近翼根位置处。两个垂直尾翼3 沿机身1的纵向轴线对称设置在撑杆9的后端。水平尾翼4与垂直尾翼3的翼尖可进行拆卸连接。在垂直起降模式下,撑杆9的前端可向前延长,并在撑杆的前端设置有前置升力螺旋桨12,同时为保证全机的力矩平衡,在撑杆9的后端设置有后置升力螺旋桨13。
[0024]
机身1采用翼身融合设计,机身1与主机翼2之间平滑过渡,在减小全机巡航阶段翼身干扰阻力的同时又增大了机身装载空间。机头采用类鹰嘴外形设计从而有利于改善机身的俯仰力矩特性。从机头至大约 1/3机身长度位置处为机身1的前段,设置为任务载荷舱,能够容纳光电球、雷达、相机等多种几何尺寸的任务设备。机身1中段设置有大容积油箱,满油状态下,燃油重量系数可以达到0.5。机身1中段两侧与主机翼2的前、后主梁连接,主机翼后梁连接于机身1中段后端的隔框上,隔框为实心壁板,以作为油箱的后壁板对油箱进行密封。机身1后段主要安装有尾推式螺旋桨5和发动机,尾推式螺旋桨5用于提供全机平飞时的推力。
[0025]
可选地,发动机可内置于机身尾部或外露;当发动机内置于机身尾部时,则相应在机身背部和腹部设置有进气道。
[0026]
可选地,机身1的横截面积形状可以为圆形、椭圆形或者其他形状,机身1后段的横截面积形状可以与机身中段相同。本实施例并不对机身1的横截面积形状进行限定。
[0027]
可选地,机身1与主机翼2的结构主要由铝制框架、铝制加强框、铝制长桁组成。框架周围覆有蒙皮,蒙皮材料可选用复合材料,在增强机身与主机翼承载能力的同时可有效减小全机结构重量。
[0028]
主机翼2沿机身1的纵向轴线对称设置在机身1中段的两侧,用于巡航阶段为无人飞行器提供主要的升力。主机翼2可以为平直翼、后掠翼、梯形翼等几何外形,本实施例并不对主机翼2的几何外形进行限定。
[0029]
可选地,主机翼2通过螺栓连接或焊接在机身1中部,翼肋可由高强度航空泡沫与碳纤维板粘合而成,翼肋周围覆以蒙皮,蒙皮可以采用碳纤维材料制成。
[0030]
主机翼2后缘设置有襟副翼6,能够同时具备襟翼和副翼的双重作用,襟副翼的做动通过襟副翼转轴与主机翼后缘连接处的内置舵机实现。当机身两侧的襟副翼同时下偏时,则具有襟翼增升效果从而改善无人飞行器的起降性能;当机身两侧的襟副翼差动偏转时,无人飞行器将产生滚转力矩从而改变飞行姿态。
[0031]
在主机翼2下方靠近翼根处,沿机身纵向轴线对称设置有两个长度相等的撑杆9。撑杆与主机翼的连接方式可以采用螺栓连接、焊接或者联结器进行连接,并可以采用高强度、轻质的航空材料,例如铝合金或钛合金进行制造,在增强撑杆承载能力的同时还能减小撑杆的重量。
[0032]
撑杆9的后端设置有垂直尾翼3,其中,垂直安定面对无人飞行器具有航向增稳作用;垂直安定面后缘设置有方向舵,以便于无人飞行器的航向操纵,方向舵的偏转通过方向舵转轴与垂直安定面连接处的内置舵机实现。垂直尾翼3与撑杆9能够快速拆装,在运输过程中可将其单独收纳,有利于减小对垂直尾翼组件的损伤。
[0033]
两个垂直尾翼3的翼尖处连接有水平尾翼4,垂直尾翼翼尖与水平尾翼翼尖的连接采用圆滑过渡的方式。水平尾翼4的后缘设置有升降舵8,从而对无人飞行器的纵向俯仰运动进行操纵,升降舵的偏转通过安装于水平尾翼对称面处靠近水平安定面后缘的内置舵机实现。
[0034]
可选地,本发明实施例提供的一种高通用大装载小型无人飞行器其起飞阶段可采用弹射起飞方式,降落方式可采用伞降方式回收。回收系统由开伞机构、主伞、脱落接头等构成,降落伞为圆形伞,安装在机身1内油箱位置之后。若因某些特殊因素不允许弹射起飞和伞降回收,也可以选择滑跑起降的方式。
[0035]
图3为本实施例提供的垂直起降模式下的结构示意图。在垂直起降模式下,无人飞行器除了包括:机身1、主机翼2、垂直尾翼3、水平尾翼4、尾推式螺旋桨5、襟副翼6、方向舵7、升降舵8、撑杆9外,还包括前置升力螺旋桨12以及后置升力螺旋桨13。与弹射起飞模式下拆装方式相似,垂直起降模式下机身1与主机翼2,主机翼2与撑杆9以及撑杆9与垂直尾翼3均进行拆卸连接以便于运输,其结构部件组装示意图如图4所示。
[0036]
本实施例提供的一种高通用性大装载无人飞行器进行垂直起降时,前置升力螺旋桨12与后置升力螺旋桨13的推力轴线均与地面垂直,两者构成四旋翼模式以同时提供垂直
向上的升力,驱使全机迅速实现垂直起降。起飞完成后,通过调整前置升力螺旋桨12与后置升力螺旋桨13的转速,从而使两者产生的升力与飞行器重力相平衡,实现全机的悬停。当全机需要抬头、低头以及侧向运动时,可通过控制前置螺旋桨与后置螺旋桨的转速,使其产生的升力在前、后、左、右有所差异,从而产生抬头/低头或侧向滚转力矩,进而实现飞行器的俯仰运动或者侧向滚转。
[0037]
在本实施例提供的一种高通用大装载小型无人飞行器完成垂直起飞之后,尾推式螺旋桨5开始高速旋转,为全机提供前进推力使其加速平飞,从而进入过渡转换阶段,此时,前置升力螺旋桨12与后置升力螺旋桨13仍为全机提供升力,但转速随着全机前飞速度的增大逐渐减小,待大于失速速度之后则停止工作;或者前置升力螺旋桨12与后置升力螺旋桨13在过渡转换阶段的转速保持不变,待全机平飞速度大于失速速度之后迅速停止工作。
[0038]
当实施例提供的一种小型无人飞行器进入平飞模式时,前置升力螺旋桨12与后置升力螺旋桨13停止工作,并且螺旋桨桨叶由锁定机构锁死。全机在平飞阶段所需的升力主要由主机翼2提供,全机的俯仰运动、滚转运动以及偏航运动由相应的气动舵面,即升降舵8,襟副翼6以及方向舵7进行操纵控制。
[0039]
同理,在本发明实施例提供的无人飞行器由平飞状态转入过渡转换阶段继而进入垂直起降过程时,其前置升力螺旋桨12、后置升力螺旋桨13与尾推式螺旋桨5的工作过程为垂直起飞转平飞过程的逆过程,从而完成全机的垂直着陆动作,此处不再赘述。
[0040]
最后应说明的是:以上各实施例仅为对本发明技术方案的说明,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,对于本领域的技术人员而言,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips