
 商标分类
商标分类  商标转让
商标转让 
一种基于无人机的遥感监控系统的制作方法
 2021-02-13 13:02:58|
2021-02-13 13:02:58| 252|
252| 起点商标网
起点商标网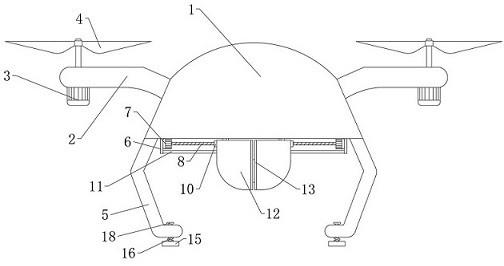
[0001]
本发明涉及遥感监控技术领域,尤其涉及一种基于无人机的遥感监控系统。
背景技术:
[0002]
无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,无人机按应用领域,可分为军用与民用,军用方面,无人机分为侦察机和靶机,民用方面,无人机+行业应用,是无人机真正的刚需,目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
[0003]
作为新技术的应用,无人机货物配送是对传统方式的有益补充,传统的管道运输、水运和多式联运,加上无人机的末端配送和支线运输,必将使现代物流的服务能力再上新台阶,其整体的效率、成本和运力也将得到优化和重构。
[0004]
但是,当前货物配送无人机的使用才刚刚兴起,低空货运无人机存在飞行数据难以及时、准确的提供给使用者的问题,还存在着数据造假的问题,在数据的可靠性和准确性方面都与实际的需求有一定的差距。
技术实现要素:
[0005]
为此,本发明提供一种基于无人机的遥感监控系统,用以克服现有技术中数据可靠性低的问题。
[0006]
本发明提供一种基于无人机的遥感监控系统,包括:无人飞机本体,所述无人飞机本体左侧面和右侧面均连接有支撑杆,所述支撑杆的底面连接有第一电机,所述第一电机的输出轴表面固定套接安装有螺旋桨,所述无人飞机本体的底面连接有支撑腿;遥感传感器,所述遥感传感器与所述无人飞机本体的底面连接,所述无人飞机本体的底面连接有第一支撑板和第二支撑板,所述第一支撑板靠近遥感传感器的侧面连接有第二电机,所述第二电机输出轴固定连接有丝杆,所述丝杆的另一端通过轴承与第二支撑板转动连接,所述丝杆的表面螺纹套接有丝套,所述第一支撑板和第二支撑板的相向面之间连接有第一滑杆,所述丝套靠近遥感传感器的侧面连接有保护罩;所述保护罩的内壁和靠近所述第二电机的侧面贯穿开设有第一滑孔,所述第一滑孔的数量为两个且两个所述第一滑孔的内壁分别与所述丝杆的表面和所述第一滑杆的表面滑动连接,所述保护罩的一端连接有密封垫;所述支撑腿的底面贯穿开设有第二滑孔,所述第二滑孔的内壁滑动插接有第二滑杆,所述第二滑杆的顶端连接有限位块,所述第二滑杆的底端连接有支撑垫,所述支撑垫的顶面连接有弹簧,所述弹簧的顶端与所述支撑腿的底面固定连接,所述支撑垫的厚度为两至三毫米且采用橡胶材料制成;
所述无人飞机本体内部设置有中控模块,所述中控模块用以控制无人飞机工作过程,其内设置有矩阵;当所述无人飞机进行工作时,所述中控模块控制所述无人飞机对目标物体电磁波由低到高进行3次探测,每次探测以不同高度、角度完成,探测完成后,所述中控模块根据探测结果计算出目标物体的电磁波q,设定q=0.5
×
l+0.3
×
m+0.2
×
n,式中,l、m、n分别为无人飞机对目标物体由低到高以不同角度测得的电磁波,所述中控模块通过控制所述遥感传感器将测得的电磁波转化为图像。
[0007]
进一步地,所述中控模块中设置有预设接收电磁波矩阵a0和预设目标温度矩阵t0;对于所述预设接收电磁波矩阵a0,设定a0(a1,a2,a3,a4),其中,a1为第一预设接收电磁波,a2为第二预设接收电磁波,a3为第三预设接收电磁波,a4为第四预设接收电磁波,各预设接收电磁波按照顺序逐渐增加;对于所述预设目标温度矩阵t0,设定t0(t1,t2,t3,t4),其中,t1为第一预设目标温度,t2为第二预设目标温度,t3为第三预设目标温度,t4为第四预设目标温度,各预设目标温度按照顺序逐渐增加;当所述中控模块选用接收电磁波时,所述中控模块将目标物体的实际温度t与目标温度矩阵t0中的参数进行比对,并根据比对结果选用对应的接收电磁波:当t<t1时,所述中控模块选用a1作为接收电磁波;当t1≤t<t2时,所述中控模块选用a2作为接收电磁波;当t2≤t<t3时,所述中控模块选用a3作为接收电磁波;当t3≤t<t4时,所述中控模块选用a4作为接收电磁波。
[0008]
进一步地,所述中控模块中还设置有预设接收电磁波调节系数矩阵a0和预设空气湿度矩阵h0;对于所述预设接收电磁波调节系数矩阵a0,设定a0(a1,a2,a3,a4),其中,a1为第一预设接收电磁波调节系数,a2为第二预设接收电磁波调节系数,a3为第三预设接收电磁波调节系数,a4为第四预设接收电磁波调节系数,各预设电磁波调节系数按照顺序逐渐增加;对于所述预设空气湿度矩阵h0,设定h0(h1,h2,h3,h4),其中,h1为第一预设空气湿度,h2为第二预设空气湿度,h3为第三预设空气湿度,h4为第四预设空气湿度,各预设空气湿度按照顺序逐渐增加;当所述中控模块针对选用的接收电磁波ai进行调节时,设定i=1,2,3,4,所述中控模块将实际空气湿度h与空气湿度矩阵h0中的参数进行比对,并根据比对结果选用对应的接收电磁波调节系数对ai进行调节:当h<h1时,所述中控模块选用a1对ai进行调节;当h1≤h<h2时,所述中控模块选用a2对ai进行调节;当h2≤h<h3时,所述中控模块选用a3对ai进行调节;当h3≤h<h4时,所述中控模块选用a4对ai进行调节;当所述中控模块选用aj对选用的ai进行调节时,设定j=1,2,3,4,调节后的初步干燥频率为ai
’
,设定ai
’
=ai
×
aj。
[0009]
进一步地,所述中控模块中还设置有预设接收电磁波调节系数修正系数矩阵b0和
预设大气折射率矩阵n0;对于所述预设接收电磁波调节系数修正系数矩阵b0,设定b0(b1,b2,b3,b4),其中,b1为第一预设接收电磁波调节系数修正系数,b2为第二预设接收电磁波调节系数修正系数,b3为第三预设接收电磁波调节系数修正系数,b4为第四预设接收电磁波调节系数修正系数,各预设接收电磁波调节系数修正系数按照顺序逐渐增加;对于所述预设大气折射率矩阵n0,设定n0(n1,n2,n3,n4),其中,n1为第一预设大气折射率,n2为第二预设大气折射率,n3为第三预设大气折射率,n4为第四预设大气折射率,各预设大气折射率按照顺序逐渐增加;当所述中控模块针对选用的接收电磁波调节系数aj进行修正时,所述中控模块将此时大气折射率n与大气折射率矩阵n0中的参数进行比对,并根据比对结果选用接收电磁波调节系数修正系数对aj进行修正:当n<n1时,所述中控模块选用b1对aj进行修正;当n1≤n<n2时,所述中控模块选用b2对aj进行修正;当n2≤n<n3时,所述中控模块选用b3对aj进行修正;当n3≤n<n4时,所述中控模块选用b4对aj进行修正;当所述中控模块选用bk对选用的aj进行修正时,设定k=1,2,3,4,修正后的接收电磁波调节系数为aj
’
,设定aj
’
=aj
×
bk。
[0010]
进一步地,所述中控模块中还设置有预设大气折射率调节系数矩阵c0和预设飞行高度矩阵b0;对于所述预设大气折射率调节系数矩阵c0,设定c0(c1,c2,c3,c4),其中,c1为第一预设大气折射率调节系数,c2为第二预设大气折射率调节系数,c3为第三预设大气折射率调节系数,c4为第四预设大气折射率调节系数,各预设大气折射率调节系数按照顺序逐渐增加;对于所述预设飞行高度矩阵b0,设定b0(b1,b2,b3,b4),其中,b1为第一预设飞行高度,b2为第二预设飞行高度,b3为第三预设飞行高度,b4为第四预设飞行高度,各预设飞行高度按照顺序逐渐增加;当所述中控模块针对预设的大气折射率ni进行调节时,设定i=1,2,3,4,所述中控模块将实际飞行高度b与飞行高度矩阵b0中的参数进行比对,并根据比对结果选用对应的大气折射率调节系数对ni进行调节:当b<b1时,所述中控模块选用c1对ni进行调节;当b1≤b<b2时,所述中控模块选用c2对ni进行调节;当b2≤b<b3时,所述中控模块选用c3对ni进行调节;当b3≤b<b4时,所述中控模块选用c4对ni进行调节;当所述中控模块选用cj对预设的ni进行调节时,设定j=1,2,3,4,调节后的大气折射率为ni
’
,设定ni
’
=ni
×
cj。
[0011]
进一步地,所述中控模块中设定l、m、n均为ai
×
aj
×
bk。
[0012]
进一步地,所述第一支撑板、所述第二支撑板、所述第二电机、所述第一滑杆和所述保护罩的数量均为两个且分别位于遥感传感器的左侧和右侧,所述第一支撑板、所述第二支撑板、所述第二电机和所述第一滑杆用以控制所述保护罩的开合。
[0013]
进一步地,所述第一电机为长轴步进电机,所述支撑杆的数量为四个且每两个为一组,两组所述支撑杆分别位于无人飞机本体的左右两侧,用以控制所述无人机平稳的起飞和降落。
[0014]
进一步地,所述第一滑杆为圆形柱状结构用以配合保护罩的开合,所述保护罩采用亚力克力材料制成用以减小所述无人飞机的负载。
[0015]
与现有技术相比,本发明的有益效果在于,本发明所述基于无人机的遥感监控系统,通过设置第二电机、丝杆和第一滑杆,第二电机转动使得丝套在丝杆的表面滑动,从而带动保护罩在第一滑杆的表面滑动,两个保护罩向遥感传感器的两侧打开,将遥感传感器露出,增加了便于对遥感传感器进行防护的装置,延长了遥感器的使用寿命;所述中控模块通过控制所述无人飞机对目标物体电磁波由低到高以不同角度进行3次探测并对3次探测所得电磁波进行加权平均,使探测所得电磁波更加准确,进而有效提高了数据可靠性。
[0016]
进一步地,所述中控模块通过将目标物体的实际温度t与目标温度矩阵t0中的参数进行比对选用对应的接收电磁波,有效提高了所述无人飞机探测目标电磁波的准确度,进一步提高了数据可靠性。
[0017]
进一步地,所述中控模块通过将实际空气湿度h与空气湿度矩阵h0中的参数进行比对选用对应的接收电磁波调节系数对接收电磁波进行调节,有效提高了所述无人飞机探测目标电磁波的准确度,进一步提高了数据可靠性。
[0018]
进一步地,所述中控模块通过将所述无人飞机实际位置的大气折射率n与大气折射率矩阵n0中的参数进行比对选用对应的接收电磁波调节系数修正系数对接收电磁波调节系数进行修正,有效提高了所述无人飞机探测目标电磁波的准确度,进一步提高了数据可靠性。
[0019]
进一步地,所述中控模块通过将所述无人飞机实际飞行高度b与飞行高度矩阵b0中的参数进行比对选用对应的大气折射率调节系数对大气折射率进行调节,有效提高了所述无人飞机探测目标电磁波的准确度,进一步提高了数据可靠性。
附图说明
[0020]
图1为本发明所述基于无人机的遥感监控系统的结构正视示意图;图2为本发明所述基于无人机的遥感监控系统的结构正剖示意图。
具体实施方式
[0021]
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
[0022]
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
[0023]
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0024]
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安
装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
[0025]
请参阅图1、图2所示,其分别为本发明所述基于无人机的遥感监控系统的结构正视示意图和结构正剖示意图。
[0026]
本发明提供一种基于无人机的遥感监控系统,包括:无人飞机本体1,所述无人飞机本体1左侧面和右侧面均连接有支撑杆2,所述无人飞机本体1内部设置有中控模块(图中未画出),所述中控模块用以控制所述无人飞机工作过程,其内设置有矩阵,所述支撑杆2的数量为四个且每两个所述支撑杆2为一组,两组所述支撑杆2分别位于所述无人飞机本体1的左右两侧,所述支撑杆2的底面连接有第一电机3,所述第一电机3为长轴步进电机,所述第一电机3的输出轴表面固定套接安装有螺旋桨4,所述无人飞机本体1的底面连接有支撑腿5,所述无人飞机本体1的底面连接有遥感传感器14,所述无人飞机本体1的底面连接有第一支撑板6和第二支撑板9,所述第一支撑板6靠近所述遥感传感器14的侧面连接有第二电机7,所述第二电机7输出轴固定连接有丝杆8,所述丝杆8的另一端通过轴承与所述第二支撑板9转动连接,所述丝杆8的表面螺纹套接有丝套10,所述第一支撑板6和所述第二支撑板9的相向面之间连接有第一滑杆11,所述第一滑杆11为圆形柱状结构,所述第一滑杆11方便保护罩12平滑的打开和关闭,所述丝套10靠近所述遥感传感器14的侧面连接有所述保护罩12,所述保护罩12避免了无人飞机飞行时所述遥感传感器14的表面积灰情况,提高了被测数据的精准度,所述保护罩12采用亚力克力材料制成,采用亚克力材料更加轻盈,减小了无人飞机负载。
[0027]
所述第一支撑板6、所述第二支撑板9、所述第二电机7、所述第一滑杆11和所述保护罩12的数量均为两个且分别位于所述遥感传感器14的左侧和右侧,所述第二电机7转动使得所述丝套10在所述丝杆8的表面滑动,带动所述保护罩12在第一滑杆11的表面滑动,两侧所述保护罩12向所述遥感传感器14的两侧打开,将所述遥感传感器14露出,两个所述保护罩12同时打开时可以以最大面积将所述遥感传感器14露出,方便所述遥感传感器14进行检测,所述保护罩12的内壁和靠近所述第二电机7的侧面贯穿开设有第一滑孔(图中未画出),所述第一滑孔的数量为两个,两个所述第一滑孔的内壁分别与所述丝杆8的表面和所述第一滑杆11的表面滑动连接,所述保护罩12的一端连接有密封垫13。
[0028]
所述支撑腿5的底面贯穿开设有第二滑孔(图中未画出),所述第二滑孔的内壁滑动插接有第二滑杆17,所述第二滑杆17的顶端连接有限位块18,所述第二滑杆17的底端连接有支撑垫15,所述支撑垫15的顶面连接有弹簧16,所述弹簧16的顶端与所述支撑腿5的底面固定连接,所述支撑垫15的厚度为两至三毫米,所述支撑垫15采用橡胶材料制成,通过所述支撑垫15、所述弹簧16和所述第二滑杆17的相互配合,可以对无人飞机在降落接触地面时进行缓冲,防止所述遥感传感器14碰触地面而损坏。
[0029]
具体而言,当所述无人飞机进行工作时,所述中控模块控制所述无人飞机对目标物体电磁波由低到高进行3次探测,每次探测以不同高度、角度完成,探测完成后,所述中控模块根据探测结果计算出目标物体的电磁波q,设定q=0.5
×
l+0.3
×
m+0.2
×
n,式中,l、m、n分别为无人飞机对目标物体由低到高以不同角度测得的电磁波,所述中控模块通过控制所
述遥感传感器将测得的电磁波转化为图像。
[0030]
具体而言,所述中控模块中设置有预设接收电磁波矩阵a0和预设目标温度矩阵t0;对于所述预设接收电磁波矩阵a0,设定a0(a1,a2,a3,a4),其中,a1为第一预设接收电磁波,a2为第二预设接收电磁波,a3为第三预设接收电磁波,a4为第四预设接收电磁波,各预设接收电磁波按照顺序逐渐增加;对于所述预设目标温度矩阵t0,设定t0(t1,t2,t3,t4),其中,t1为第一预设目标温度,t2为第二预设目标温度,t3为第三预设目标温度,t4为第四预设目标温度,各预设目标温度按照顺序逐渐增加;当所述中控模块选用接收电磁波时,所述中控模块将目标物体的实际温度t与目标温度矩阵t0中的参数进行比对,并根据比对结果选用对应的接收电磁波:当t<t1时,所述中控模块选用a1作为接收电磁波;当t1≤t<t2时,所述中控模块选用a2作为接收电磁波;当t2≤t<t3时,所述中控模块选用a3作为接收电磁波;当t3≤t<t4时,所述中控模块选用a4作为接收电磁波。
[0031]
具体而言,所述中控模块中还设置有预设接收电磁波调节系数矩阵a0和预设空气湿度矩阵h0;对于所述预设接收电磁波调节系数矩阵a0,设定a0(a1,a2,a3,a4),其中,a1为第一预设接收电磁波调节系数,a2为第二预设接收电磁波调节系数,a3为第三预设接收电磁波调节系数,a4为第四预设接收电磁波调节系数,各预设电磁波调节系数按照顺序逐渐增加;对于所述预设空气湿度矩阵h0,设定h0(h1,h2,h3,h4),其中,h1为第一预设空气湿度,h2为第二预设空气湿度,h3为第三预设空气湿度,h4为第四预设空气湿度,各预设空气湿度按照顺序逐渐增加;当所述中控模块针对选用的接收电磁波ai进行调节时,设定i=1,2,3,4,所述中控模块将实际空气湿度h与空气湿度矩阵h0中的参数进行比对,并根据比对结果选用对应的接收电磁波调节系数对ai进行调节:当h<h1时,所述中控模块选用a1对ai进行调节;当h1≤h<h2时,所述中控模块选用a2对ai进行调节;当h2≤h<h3时,所述中控模块选用a3对ai进行调节;当h3≤h<h4时,所述中控模块选用a4对ai进行调节;当所述中控模块选用aj对选用的ai进行调节时,设定j=1,2,3,4,调节后的初步干燥频率为ai
’
,设定ai
’
=ai
×
aj。
[0032]
所述中控模块通过将实际空气湿度h与空气湿度矩阵h0中的参数进行比对选用对应的接收电磁波调节系数对接收电磁波进行调节,有效提高了所述无人飞机探测目标电磁波的准确度,进一步提高了数据可靠性。
[0033]
具体而言,所述中控模块中还设置有预设接收电磁波调节系数修正系数矩阵b0和预设大气折射率矩阵n0;对于所述预设接收电磁波调节系数修正系数矩阵b0,设定b0(b1,b2,b3,b4),其中,b1为第一预设接收电磁波调节系数修正系数,b2为第二预设接收电磁波调节系数修正系数,
b3为第三预设接收电磁波调节系数修正系数,b4为第四预设接收电磁波调节系数修正系数,各预设接收电磁波调节系数修正系数按照顺序逐渐增加;对于所述预设大气折射率矩阵n0,设定n0(n1,n2,n3,n4),其中,n1为第一预设大气折射率,n2为第二预设大气折射率,n3为第三预设大气折射率,n4为第四预设大气折射率,各预设大气折射率按照顺序逐渐增加;当所述中控模块针对选用的接收电磁波调节系数aj进行修正时,所述中控模块将此时大气折射率n与大气折射率矩阵n0中的参数进行比对,并根据比对结果选用接收电磁波调节系数修正系数对aj进行修正:当n<n1时,所述中控模块选用b1对aj进行修正;当n1≤n<n2时,所述中控模块选用b2对aj进行修正;当n2≤n<n3时,所述中控模块选用b3对aj进行修正;当n3≤n<n4时,所述中控模块选用b4对aj进行修正;当所述中控模块选用bk对选用的aj进行修正时,设定k=1,2,3,4,修正后的接收电磁波调节系数为aj
’
,设定aj
’
=aj
×
bk。
[0034]
具体而言,所述中控模块中还设置有预设大气折射率调节系数矩阵c0和预设飞行高度矩阵b0;对于所述预设大气折射率调节系数矩阵c0,设定c0(c1,c2,c3,c4),其中,c1为第一预设大气折射率调节系数,c2为第二预设大气折射率调节系数,c3为第三预设大气折射率调节系数,c4为第四预设大气折射率调节系数,各预设大气折射率调节系数按照顺序逐渐增加;对于所述预设飞行高度矩阵b0,设定b0(b1,b2,b3,b4),其中,b1为第一预设飞行高度,b2为第二预设飞行高度,b3为第三预设飞行高度,b4为第四预设飞行高度,各预设飞行高度按照顺序逐渐增加;当所述中控模块针对预设的大气折射率ni进行调节时,设定i=1,2,3,4,所述中控模块将实际飞行高度b与飞行高度矩阵b0中的参数进行比对,并根据比对结果选用对应的大气折射率调节系数对ni进行调节:当b<b1时,所述中控模块选用c1对ni进行调节;当b1≤b<b2时,所述中控模块选用c2对ni进行调节;当b2≤b<b3时,所述中控模块选用c3对ni进行调节;当b3≤b<b4时,所述中控模块选用c4对ni进行调节;当所述中控模块选用cj对预设的ni进行调节时,设定j=1,2,3,4,调节后的大气折射率为ni
’
,设定ni
’
=ni
×
cj。
[0035]
所述中控模块通过将所述无人飞机实际飞行高度b与飞行高度矩阵b0中的参数进行比对选用对应的大气折射率调节系数对大气折射率进行调节,有效提高了所述无人飞机探测目标电磁波的准确度,进一步提高了数据可靠性。
[0036]
具体而言,所述中控模块中设定l、m、n均为ai
×
aj
×
bk。
[0037]
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些
更改或替换之后的技术方案都将落入本发明的保护范围之内。
[0038]
以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。 凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips