
 商标分类
商标分类  商标转让
商标转让 
大扭矩六旋翼飞行器的制作方法
 2021-02-13 12:02:07|
2021-02-13 12:02:07| 292|
292| 起点商标网
起点商标网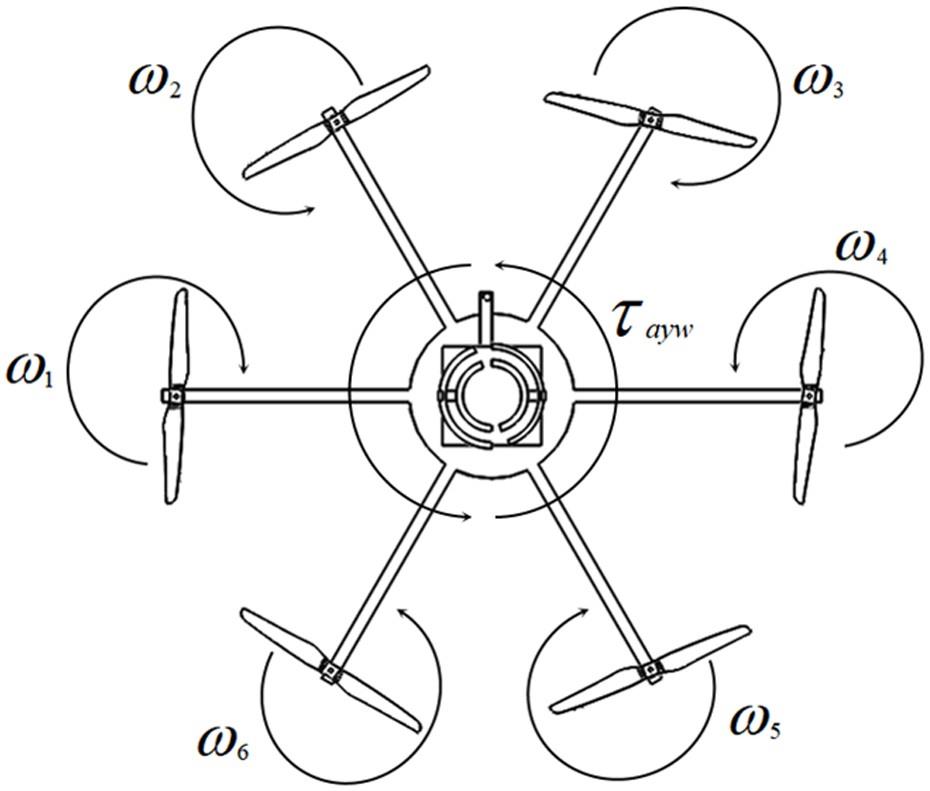
[0001]
本实用新型涉及多旋翼飞行器技术领域,特别涉及一种大扭矩六旋翼飞行器。
背景技术:
[0002]
多旋翼飞行器因其操控简便、机动灵活等特点,已经成为在三维空间中飞行的标准平台。带有机械手的多旋翼飞行器的研究已经成为热点,机械手可以被安装在多旋翼飞行器下方、上方和侧面,可以抓取或触摸物体。但在高空作业中,比如换灯泡或拧螺丝等工作还需要扭转等操作,如果只靠多旋翼飞行器旋转而带动机械手旋转提供的扭矩太小,无法完成扭转工作。
技术实现要素:
[0003]
本实用新型的目的在于提供一种大扭矩六旋翼飞行器,该飞行器不仅有利于为扭转工作提供大扭矩,而且结构简单,易于实现。
[0004]
为实现上述目的,本实用新型采用的技术方案是:一种大扭矩六旋翼飞行器,包括机体(1)、六根支撑臂(2)、六个旋翼(3)、冲击装置(4)、机械手安装座(5)和电控单元,所述六根支撑臂(2)均匀安装于机体(1)外周部上,所述六个旋翼(3)分别经转轴安装于相应的支撑臂(2)外侧端,并由安装于支撑臂(2)上的电机驱动旋转,所述冲击装置(4)包括上座和下座,所述下座安装于机体(1)上部,所述机械手安装座(5)安装于上座上,用于安装机械手,所述上座与下座转动连接且两者之间具有一定高度的间隙,所述下座上侧面设有第一撞击块,所述上座下侧面设有第二撞击块,以当下座相对上座转过一定角度时,使第一撞击块撞击第二撞击块,从而为机械手进行扭转工作提供大扭矩,所述电控单元设于机体(1)中并与各电机电性连接,以控制各旋翼转动。
[0005]
进一步地,所述第一撞击块和第二撞击块位于同一周向位置,所述下座和上座可相对旋转180
°
。
[0006]
进一步地,所述六根支撑臂(2)的几何中心线在同一平面上,各相邻两根支撑臂(2)的几何中心线之间的夹角为60度,各相邻两个旋翼(3)的旋转方向相反。
[0007]
进一步地,所述冲击装置(4)上一侧部安装有摄像机(6)。
[0008]
与现有技术相比,本实用新型具有以下有益效果:通过简单的结构实现了大扭矩,克服了传统机械手六旋翼飞行器不能提供扭矩或大扭矩的缺陷,可满足大量需要扭转的工作需求,具有很强的实用性和广阔的应用前景。
附图说明
[0009]
图1是本实用新型实施例的大扭矩六旋翼飞行器的结构示意图。
[0010]
图2是本实用新型实施例中冲击装置的结构示意图。
[0011]
图3是本实用新型实施例中大扭矩六旋翼飞行器的旋转状态示意图。
具体实施方式
[0012]
下面结合附图及具体实施例对本实用新型作进一步的详细说明。
[0013]
本实用新型提供了一种大扭矩六旋翼飞行器,如图1所示,包括机体1、六根支撑臂2、六个旋翼3、冲击装置4、机械手安装座5和电控单元。所述六根支撑臂2均匀安装于机体1外周部上,所述六个旋翼3分别经转轴安装于相应的支撑臂2外侧端,并由安装于支撑臂2上的电机驱动旋转。所述电控单元设于机体1中并与各电机电性连接,以控制各旋翼转动。
[0014]
如图2所示,所述冲击装置4包括上座42和下座41,所述下座41安装于机体1上部,所述机械手安装座5安装于上座42上,用于安装机械手,所述上座42与下座41转动连接且两者之间具有一定高度的间隙,所述下座41上侧面设有第一撞击块43,所述上座42下侧面设有第二撞击块44,以当下座41相对上座42转过一定角度时,使第一撞击块43撞击第二撞击块44,从而为机械手进行扭转工作提供大扭矩。所述第一撞击块43和第二撞击块44位于同一周向位置,所述下座和上座可相对旋转180
°
。
[0015]
在机械手抓住物体后,控制六旋翼飞行器转动,在机体1及下座41转动180
°
后,获得一个速度v,然后第一撞击块43撞击第二撞击块44,经过δt时间,六旋翼飞行器速度变为v
′
=0,从而产生一个冲力,则平均冲力为则扭矩为该冲力为机械手进行扭转工作提供了一个较大的扭矩。
[0016]
所述六根支撑臂2的几何中心线在同一平面上,各相邻两根支撑臂2的几何中心线之间的夹角为60度,各相邻两个旋翼3的旋转方向相反。
[0017]
在本实施例中,所述冲击装置4的上座42上一侧部安装有摄像机6。
[0018]
本实用新型的大扭矩六旋翼飞行器的工作过程为:当安装于机械手安装座上的机械手抓住物体,需要进行顺时针或逆时针扭转工作时,控制六个旋翼的转速,使机体连同其上的下座相对于上座进行顺时针或逆时针旋转,进而使第一撞击块撞击第二撞击块,从而为机械手进行扭转工作提供大扭矩。如图3所示,控制六个旋翼中各相邻两个旋翼按相反方向旋转,即第一、三、五旋翼以转速ω1=ω3=ω5=ω
cw
顺时针旋转,第二、四、六旋翼以转速ω2=ω4=ω6=ω
ccw
逆时针旋转;当时,机体进行顺时针旋转,产生顺时针方向的扭转力矩,当时,机体进行逆时针旋转,产生逆时针方向的扭转力矩,即由旋翼的转速差来决定扭转力矩的方向;各旋翼的扭矩q
i
与转速ω
i
的关系为:其中c
q
是旋翼的旋转表面积、旋转半径和空气密度决定的系数;则六个旋翼的扭转力矩之和τ
yaw
表示为:
[0019][0020]
由于ω1=ω3=ω5=ω
cw
且ω2=ω4=ω6=ω
ccw
,则扭转力矩之和为:
[0021][0022]
以上是本实用新型的较佳实施例,凡依本实用新型技术方案所作的改变,所产生的功能作用未超出本实用新型技术方案的范围时,均属于本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips