
 商标分类
商标分类  商标转让
商标转让 
一种基于气动的太阳翼控制及振动快速抑制机构的制作方法
 2021-02-13 12:02:50|
2021-02-13 12:02:50| 203|
203| 起点商标网
起点商标网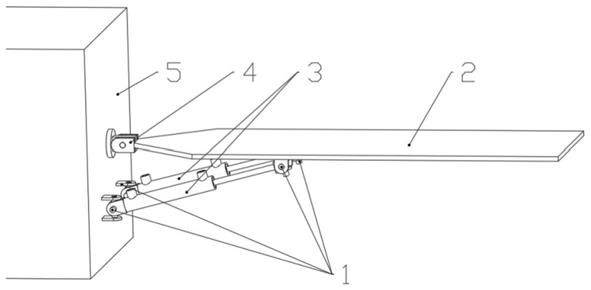
[0001]
本实用新型属于太阳翼控制领域,具体涉及一种基于气动的太阳翼控制及振动快速抑制机构。
背景技术:
[0002]
研究发展载人航天航空是我国21世纪科技发展的重要战略目的之一。随着我国载人航天航空事业的发展,航天器的结构日益复杂,同时对结构的稳定性、航天器的运动性能要求越来越严格。太阳翼作为卫星的主要能量来源,需要不断调整太阳翼的姿态以保持其与太阳的相对角度关系;由于太阳翼展开后长度甚至达到10m之长,对太阳翼的姿态控制存在不小的难题。
[0003]
太阳翼的稳定性对卫星的姿态及运动性能有很大的影响,目前对太阳翼的抑制分为主动抑制和被动抑制。被动抑制主要利用自身机械结构,无需额外驱动装置;但结构设计较为复杂,且抑制效果通常较差。主动抑制是依靠电机等主动原件对太阳翼振动进行主动抑制,效果较好,但需要额外的控制。
技术实现要素:
[0004]
本实用新型为针对太阳翼运动控制的机构,且基于该机构可以实现太阳翼振动的被动控制;另外本实用新型还进一步公开了基于太阳翼控制机构的主动快速抑制机构。采用气动推杆作为主动件,相对常见的电机为主动件,气动推杆在主动干涉振动的同时,有着较大的阻尼。气动推杆中的气体会被压缩拉伸,将振动的能量转化为热能,能过更好的抑制太阳翼的振动。
[0005]
本申请的实施例公开了一种基于气动的太阳翼控制及振动快速抑制机构,包括:
[0006]
太阳翼本体;
[0007]
二自由度铰链,位于太阳翼本体一端,用于将太阳翼本体固定在航天器上;
[0008]
两个气动推杆,每个气动推杆的一端均通过虎克铰与太阳翼本体的背光面铰接,另一端用于铰接在航天器上;
[0009]
所述的气动推杆包括推杆和气动推杆套;推杆伸入气动推杆套内的一端将气动推杆套分为a、b两个独立的气腔;气动推杆套两端分别设有连通a气腔的气口a和连通b气腔的气口b;推杆未伸入气动推杆套内的一端通过虎克铰与太阳翼本体的背光面铰接。
[0010]
作为优选,两个气动推杆的尺寸和可伸缩长度完全相同。
[0011]
作为优选,两个气动推杆关于太阳翼本体中心线所在垂直于太阳翼本体的面对称布置。
[0012]
作为优选,所述的基于气动的太阳翼控制机构还包括a、b两个气体储罐,气体储罐a通过两个气体管路分别连接两个气动推杆的气口a;气体储罐b通过两个气体管路分别连接两个气动推杆的气口b。
[0013]
作为优选,所述的气体管路上设有气泵,所述的两个气体储罐和气泵均安装于航
天器上。
[0014]
本申请的实施例还公开了一种一种基于气动的太阳翼控制及振动快速抑制机构,其还包括激光距离传感器和振动传感器;所述的激光距离传感器安装在两个气动推杆的任一气腔内,用于检测推杆位置;所述的振动传感器安装于太阳翼本体的背光面。
[0015]
作为优选,所述的振动传感器安装于两个气动推杆连接的虎克铰中间位置。
[0016]
相比于现有技术,本实用新型具有的有益效果是:
[0017]
本实用新型首先通过气动推杆的形式,实现太阳翼运动的控制,气动推杆一方面简化了现有太阳翼运动控制机构的复杂程度,并可实现太阳翼的多自由度运动,另一方面由于气体可压缩的特性使得太阳翼本体通过启动推杆具备良好的被动减振特性,太阳翼本体的振动可以通过气动推杆内的气体进行减振,极大减弱对航天器产生振动干扰。
[0018]
本实用新型进一步公开了一种基于太阳翼控制机构的振动快速抑制机构,在被动减振的基础上,对于被动减振难以有效抑制的振动情况,通过振动传感器检测振动,并通过控制两个气动推杆实现振动的抑制。
附图说明
[0019]
图1为本实用新型太阳翼控制机构的结构示意图;
[0020]
图2为本实用新型气动推杆的结构示意图;
[0021]
图3为太阳翼控制机构背光面的结构示意图。
[0022]
图4为实施例中供气系统的示意图。
具体实施方式
[0023]
下面结合具体实施例对本实用新型的技术方案做进一步的详细说明,但不能以此限定本实用新型的范围。即凡是依本实用新型申请专利范围所作的变化与修饰,皆应仍属于专利涵盖的范围内。
[0024]
如图1和2所示,本实施例公开了一种基于气动的太阳翼控制及振动快速抑制机构,包括太阳翼本体2、二自由度铰链4、两个气动推杆3;二自由度铰链4位于太阳翼本体2一端,用于将太阳翼本体2固定在航天器5上;每个气动推杆3的一端均通过虎克铰1与太阳翼本体2的背光面铰接,另一端用于铰接在航天器5上;
[0025]
所述的气动推杆3包括推杆8和气动推杆套;推杆伸入气动推杆套内的一端将气动推杆套分为a、b两个独立的气腔;气动推杆套两端分别设有连通a气腔9的气口a 6和连通b气腔10的气口b 7;推杆未伸入气动推杆套内的一端通过虎克铰与太阳翼本体的背光面铰接。
[0026]
本实施例中的航天器5以卫星为例,二自由度铰链4实现太阳翼本体绕x、y轴的旋转。
[0027]
在本实用新型的一个具体实施例中,两个气动推杆的尺寸和可伸缩长度完全相同;两个气动推杆关于太阳翼本体中心线所在垂直于太阳翼本体的面对称布置。两个气动推杆尺寸相同和对称布置可以简化运动控制的复杂度。但本实用新型并不要求两个气动推杆一定要尺寸相同并对称布置。
[0028]
如图4所示,在本实用新型的一个具体实施例中,所述的基于气动的太阳翼控制机
构还包括a、b两个气体储罐,气体储罐a通过两个气体管路分别连接两个气动推杆3-1和3-2的气口a;气体储罐b通过两个气体管路分别连接两个气动推杆3-1和3-2的气口b。所述的气体管路上设有气泵,所述的两个气体储罐和气泵均安装于航天器上。气体储罐内的气体可以为空气或氮气;通过气泵的抽放气实现气动推杆内推杆位置的调整。力的大小为f=s
b
×
p
b-s
a
×
p
a
,s
a
、s
b
为a、b气腔中推杆受力面积,p
a
、p
b
为a、b气腔的气压。因此通过控制两个气腔内的气压大小即可控制推杆的移动方向。刚推杆到达设定的位置时,可使两个气腔的压力保持相同并关闭气泵,此时启动推杆即具备良好的被动减振功能。由于气腔关闭,因此太阳翼本体产生震动时,将带动推杆压缩气腔,气腔受压则气压变大,产生反作用力,从而抑制震动,此时气动推杆类似减震弹簧的效果。
[0029]
进一步的,可以在气动推杆内部设置激光距离传感器11用于检测推杆8位置。
[0030]
如图1-3所示,本实施例还公开了一种基于所述太阳翼控制机构的振动快速抑制机构;其还包括激光距离传感器11和振动传感器12;所述的激光距离传感器11安装在两个气动推杆的任一气腔内,用于检测推杆位置;所述的振动传感器12安装于太阳翼本体的背光面。当因为太空环境导致太阳翼振动时,振动传感器11收集振动曲线。通过同时两个气动推杆的a、b气腔气压,使得气动推杆产生波形相反的振动,使得振动被快速抑制。这种主动减振一般只在太阳翼振动较强烈的情况下才采用。本实用新型的气动推杆的被动减振已经具备非常好的减振效果。振动传感器可以为高精度陀螺仪传感器。所述的振动传感器12安装于两个气动推杆连接的虎克铰中间位置。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips