
 商标分类
商标分类  商标转让
商标转让 
竖直式无人机的制作方法
 2021-02-13 11:02:48|
2021-02-13 11:02:48| 181|
181| 起点商标网
起点商标网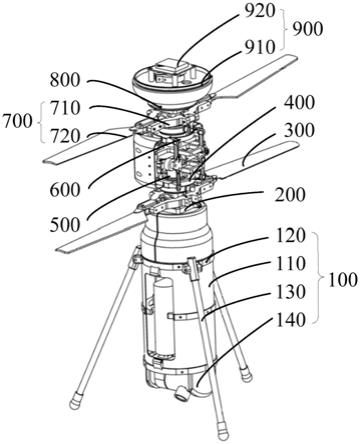
[0001]
本公开涉及无人机领域,尤其涉及一种竖直式无人机。
背景技术:
[0002]
目前,无人机技术极大发展,普适应的通用无人机充斥市场。目前阶段,行业专用无人机渐渐受到市场的青睐。
[0003]
现有的军用多旋翼和固定翼型单兵无人机因为外形尺寸较大,非规则外形部件多,其中,固定翼型一般需拆下旋翼桨叶和机身并排携带,为了保护易损的旋翼桨叶,需要很大尺寸的长方体型携行具。而多旋翼类每个机臂均有旋翼折叠机臂和旋翼后,机身外尺寸即为最小携带尺寸,一般为立方体型携行箱,单兵携带很不方便,并且占用单兵携带装备编制。
技术实现要素:
[0004]
有鉴于此,本公开提出了一种竖直式无人机,其能够迅速展开,保证兵员的战斗力。
[0005]
根据本公开的一方面,提供了一种竖直式无人机,包括:筒状机身、第一电机、下旋翼、下倾斜器、主轴、上倾斜器、上旋翼和第二电机;
[0006]
其中,所述第一电机、所述下旋翼、所述上倾斜器、所述下倾斜器、所述上旋翼和所述第二电机均以所述主轴的轴心线为轴同轴设置;
[0007]
所述主轴的一端与所述第一电机的定子固定连接,所述上旋翼连接所述第一电机的转子;所述主轴穿过第一电机安装在所述筒状机身上,且所述第一电机与所述筒状机身内的电机调速器电连接;
[0008]
所述主轴的另一端与所述第二电机的定子固定连接,所述上旋翼连接所述第二电机的转子上,所述第二电机与所述筒状机身内电机调速器电连接;
[0009]
其中,所述上旋翼和所述下旋翼均为可折叠式结构;
[0010]
所述上倾斜器和所述下倾斜器均套接在所述主轴上,且所述上倾斜器和所述下倾斜器均处于所述上旋翼和所述下旋翼之间;
[0011]
所述上倾斜器靠近所述上旋翼,且所述上倾斜器与所述上旋翼采用万向球节连接,所述下倾斜器靠近所述下旋翼,且所述下倾斜器与所述下旋翼采用万向球节连接。
[0012]
在一种可能的实现方式中,所述上旋翼包括上桨毂、上桨夹和上旋翼桨叶,所述上桨毂安装在所述第二电机的转子上,所述上桨夹铰接在所述上桨毂的外侧,所述上桨夹和所述上桨毂的铰接轴线与所述上桨毂的轴心线垂直设置;
[0013]
所述上旋翼桨叶与所述上桨夹铰接,且所述上旋翼桨叶与所述上桨夹的铰接轴与所述上桨毂的轴心线平行设置;
[0014]
所述下旋翼包括下桨毂、下桨夹和下旋翼桨叶,所述下桨毂安装在所述第一电机的转子上,所述下桨夹铰接在所述下桨毂的外侧,所述下桨夹与所述下桨毂的铰接轴线与
所述下桨毂的轴心线垂直设置;
[0015]
所述下旋翼桨叶与所述下桨夹铰接,且所述下旋翼桨叶与所述下桨夹的铰接轴与所述下桨毂的轴线线平行设置;
[0016]
所述上桨毂和所述上桨夹的铰接处、所述下桨毂和所述下桨夹的铰接处均固定安装有弹簧复位装置。
[0017]
在一种可能的实现方式中,所述弹簧复位机构为扭簧,所述第一电机和所述第二电机均为无刷电机。
[0018]
在一种可能的实现方式中,所述上桨夹设有两个以上,两个以上的所述上桨夹以所述主轴的轴心线为轴圆周分布;
[0019]
所述上旋翼桨叶的数量与所述上桨夹的数量相同,且所述上旋翼桨叶与所述上桨夹一一对应铰接;
[0020]
所述下桨夹设有两个以上,两个以上的所述下桨夹以所述主轴的轴心线为轴圆周分布;
[0021]
所述下旋翼桨叶的数量与所述下桨夹的数量相同,且所述下旋翼桨叶与所述下桨夹一一对应铰接。
[0022]
在一种可能的实现方式中,所述上旋翼桨叶设有两个,且两个所述上旋翼桨叶沿所述上桨毂的外壁周向阵列分布;
[0023]
所述下旋翼桨叶设有两个,且两个所述下旋翼桨叶沿所述下桨毂的外壁周向阵列分布。
[0024]
在一种可能的实现方式中,还包括gps天线,所述gps天线固定安装在所述第二电机未与所述主轴连接的一侧,且所述定位装置与所述筒状机身电连接。
[0025]
在一种可能的实现方式中,所述gps天线包括整流罩和天线,所述整流罩固定安装在所述第二电机背离所述第二电机的输出端的一侧;
[0026]
所述天线固定安装在所述整流罩的内部,所述天线的与所述筒状机身内飞控系统连接。
[0027]
在一种可能的实现方式中,还包括中部壳体和舵机;
[0028]
所述中部壳体与所述主轴同轴设置,所述中部壳体设置在所述上旋翼和所述下旋翼之间;
[0029]
所述上倾斜器和所述下倾斜器均设置在所述中部壳体内部,所述上倾斜器朝向所述第二电机的一侧与所述中部壳体的内壁抵接,所述下倾斜器朝向所述第一电机的一侧与所述中部壳体的内壁抵接;
[0030]
所述舵机固定安装在所述中部壳体的内壁上,所述舵机与所述上倾斜器、所述下倾斜器均为球型关节连杆连接,所述舵机与所述筒状机身内飞控系统电连接。
[0031]
在一种可能的实现方式中,所述筒状机身包括下壳体和云台;
[0032]
所述下壳体的内部设有电池仓,所述电池仓适用于固定安装电池,所述电池仓上设有电源接口,所述电源接口适用于与电池电连接;
[0033]
所述下壳体的侧壁上设有开口,所述开口与所述电池仓相匹配,所述开口处覆盖有电池盖;
[0034]
所述下壳体的外侧壁上设有两个卡爪,两个所述卡爪设置在所述开口处,两个所
述卡爪相对设置,电池盖卡接在两个所述卡爪之间;
[0035]
所述第一电机固定安装在所述下壳体的一端,所述云台固定安装在所述下壳体未与所述第一电机连接的底端。
[0036]
在一种可能的实现方式中,所述筒状机身还包括连接座、起落架和弹回装置;
[0037]
所述连接座套接在所述下壳体的侧壁上,所述连接座的外壁上设有凸台,所述起落架与所述凸台铰接,所述弹回装置安装在所述凸台与所述起落架的铰接处;
[0038]
所述起落架设有多个,多个所述起落架以所述下壳体的中轴线为轴圆周阵列分布,所述凸台的数量与所述起落架的数量相匹配,所述弹回装置的数量与所述起落架的数量相匹配。
[0039]
本申请实施例竖直式无人机采用了共轴上下反桨的布局,其中,主轴在本申请实施例中仅仅起到连接的作用,即,连接第一电机和第二电机。在安装时将主轴的一端插入第一电机的定子上,且主轴与第一电机的定子卡接,将下旋翼固定安装在第一电机的转子上,将主轴的另一端插入第二电机的定子上,且主轴与第二电机的定子卡接,将上旋翼固定安装在第二电机的转子上即可。此时,打开第一电机和第二电机,由于第一电机和第二电机的转向相反,即可驱动上旋翼和下旋翼以不同的转向转动。而上倾斜器和下倾斜器的设置是为了调整上旋翼和下旋翼的倾斜角度,由此方便本申请实施例竖直式无人机可以前后、左右自由飞行。上述的上旋翼和下旋翼均采用可折叠式的结构,由此可以折叠上旋翼和下旋翼,当本申请实施例竖直无人机在使用完毕后可以将上旋翼和下旋翼折叠,然后放入相配套的收纳筒内,携带十分的方便,之后再使用时将竖直式无人机从收纳筒内拿出,上旋翼和下旋翼会自动复位,由此使得本申请实施例竖直式无人机在使用时展开迅速,其展开时间接近于零,零展开时间能保持兵员的战斗力,且本申请实施例竖直式无人机的上旋翼和下旋翼采用可折叠式设计,方便了单兵携带。
[0040]
根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
附图说明
[0041]
包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了本公开的示例性实施例、特征和方面,并且用于解释本公开的原理。
[0042]
图1示出本公开实施例的竖直式无人机的安装结构示意图;
[0043]
图2示出本公开实施例的竖直式无人机的轴测图;
[0044]
图3示出本公开实施例的竖直式无人机的折叠示意图。
具体实施方式
[0045]
以下将参考附图详细说明本公开的各种示例性实施例、特征和方面。附图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0046]
其中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为
了便于描述本实用新型或简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0047]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0048]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
[0049]
另外,为了更好的说明本公开,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述,以便于凸显本公开的主旨。
[0050]
图1示出根据本公开一实施例的竖直式无人机的安装结构示意图。如图1 所示,顾名思义该竖直式无人机采用竖直式结构,该竖直式无人机包括:筒状机身100、第一电机200、下旋翼300、下倾斜器400、主轴500、上倾斜器 600、上旋翼700和第二电机800,其中,第一电机200、下旋翼300、上倾斜器600、下倾斜器400、上旋翼700和第二电机800为同轴设置,且第一电机200、下旋翼300、上倾斜器600、下倾斜器400、上旋翼700和第二电机800均以主轴500的轴心线为轴。主轴500的一端与第一电机200的定子固定连接,上旋翼700连接在第一电机200的转子上,主轴500穿过第一电机200安装在筒状机身100上,且第一电机200与筒状机身200内的电机调速器电连接。其中,筒状机身100与主轴500的轴心线同轴设置。主轴500的另一端与第二电机800的定子固定连接,下旋翼300连接在第二电机800的转子上,第二电机800与筒状机身100内的电机调速器电连接。上述的,上旋翼700和下旋翼300均采用可折叠式结构。上倾斜器600和下倾斜器400均套接在主轴500上,且上倾斜器600和下倾斜器400均处于上旋翼700和下旋翼300之间,上倾斜器600靠近上旋翼700,且上倾斜器600与上旋翼700传动连接,下倾斜器400靠近下旋翼 300,且下倾斜器400与下旋翼300传动连接。
[0051]
此处,应当指出的是,上倾斜器600和下倾斜器400为本领域相关技术人员的公知常识,上倾斜器600和下倾斜器400之间的安装方式,上倾斜器600 和上旋翼700之间的安装方式,下倾斜器400和下旋翼300之间的安装方式均为本领域相关技术人员的公知常识,固此处不做赘述。
[0052]
此处,还应当指出的是,主轴500为空心主轴,由筒状机身100引出的线缆可以穿过主轴500的内部空腔和第二电机800电连接。此处,还应当指出的是,第一电机200和第二电机800的转向相反。
[0053]
此处,还应当指出的是,上旋翼700和下旋翼300折叠后均可以自动复位。
[0054]
本申请实施例竖直式无人机采用了共轴上下反桨的布局,其中,主轴500 在本申请实施例中仅仅起到连接的作用,即,连接第一电机200和第二电机 800。在安装时将主轴500的一端插入第一电机200的定子上,且主轴500与第一电机200的定子卡接,将下旋翼300固定安装在第一电机200的转子上,将主轴500的另一端插入第二电机800的定子上,且主轴500与第二电机800的定子卡接,将上旋翼700固定安装在第二电机800的转子上即可。此时,打开第一电机200和第二电机800,由于第一电机200和第二电机800的转向相反,即可驱动上旋翼700和下旋翼300以不同的转向转动。而上倾斜器600和下倾斜器400的设置是为了调
整上旋翼700和下旋翼300的倾斜角度,由此方便本申请实施例竖直式无人机可以前后、左右自由飞行。上述的上旋翼700和下旋翼300均采用可折叠式的结构,由此可以折叠上旋翼700和下旋翼300,当本申请实施例竖直无人机在使用完毕后可以将上旋翼700和下旋翼300折叠,然后放入相配套的收纳袋内,放置十分的方便,之后再使用时将竖直式无人机从收纳袋内拿出,上旋翼700和下旋翼300会自动复位,由此使得本申请实施例竖直式无人机在使用时展开迅速,其展开时间接近于零,零展开时间能保持兵员的战斗力,且本申请实施例竖直式无人机的上旋翼700和下旋翼300采用可折叠式设计,方便了单兵携带。
[0055]
上述的上旋翼700包括采用可折叠式的结构,由此可以折叠上旋翼桨叶 720,单兵携带方便,在上旋翼桨叶720和上桨毂710之间设置复位装置,可以保证其快速复位,由复位装置控制的上旋翼桨叶720的初始位置是上旋翼桨叶720的展开状态,当本申请实施例竖直式无人机在使用完毕后可以将上旋翼桨叶720折叠,然后放入相配套的收纳袋内,然后再使用时从收纳袋内拿出,弹簧复位装置会产生迫使上旋翼桨叶720展开的力,使得上旋翼桨叶 720复位。下旋翼桨叶320的复位的原理同上旋翼桨叶720,由此,使得本申请实施例竖直式无人机在使用时展开迅速,其展开时间接近于零,零展开时间能保持兵员的战斗力,且本申请实施例竖直式无人机的上旋翼700和下旋翼300采用可折叠式设计,方便了单兵携带。
[0056]
在一种可能的实现方式中,上旋翼700包括上桨毂710、上桨夹和上旋翼桨叶720,上桨毂710安装在第二电机800的转子外壳上,上桨毂710安装在第二电机800的转子上,上桨夹铰接在上桨毂710的外侧,上桨夹和上桨毂710 的铰接轴线与上桨毂710的轴心线垂直设置。上旋翼桨叶720与上桨夹铰接,且上旋翼桨叶720与上桨夹的铰接轴与上桨毂710的轴心线平行设置。下旋翼 300包括下桨毂310、下桨夹和下旋翼桨叶320,下桨毂310安装在第一电机200 的转子上,下桨夹铰接在下桨毂310的外侧,下桨夹与下桨毂310的铰接轴线与下桨毂310的轴心线垂直设置。下旋翼桨叶320与下桨夹铰接,且下旋翼桨 320叶与下桨夹的铰接轴与下桨毂310的轴线线平行设置。上桨毂710和上桨夹的铰接处、下桨毂310和下桨夹的铰接处均固定安装有弹簧复位装置。
[0057]
上述的上旋翼700包括上桨毂710、上桨夹和上旋翼桨叶720,在上旋翼桨叶720和上桨夹之间设置复位装置,可以保证其快速复位,由复位装置控制的上旋翼桨叶720的初始位置是上旋翼桨叶720的展开状态,当本申请实施例竖直式无人机在使用完毕后可以将上旋翼桨叶720折叠,然后放入相配套的收纳袋内,然后再使用时从收纳袋内拿出,复位装置会产生迫使上旋翼桨叶720展开的力,使得上旋翼桨叶720复位。下旋翼桨叶320的复位的原理同上旋翼桨叶720。
[0058]
在一种可能的实现方式中,弹簧复位机构为扭簧,第一电机200和第二电机800均为无刷电机。
[0059]
更进一步的,在一种可能的实现方式中,上桨夹设有两个以上,两个以上的上桨夹以主轴500的轴心线为轴圆周分布,上旋翼桨叶720的数量与上桨夹的数量相同,且上旋翼桨叶720上桨夹一一对应铰接。下桨夹设有两个以上,两个以上的下桨夹以主轴500的轴心线为轴圆周分布,下旋翼桨叶320的数量与下桨夹的数量相同,且下旋翼桨叶320与下桨夹一一对应铰接。
[0060]
此处,应当指出的是,上桨毂710的外侧与上桨夹的连接处为上安装座,上安装座包括第一座体和第二座体,第一座体呈板状,第二座体也呈板状,第一座体和第二座体平行
且相对设置,第一座体和第二座体之间设置有铰接轴,铰接轴惯出第一座体板面和第二座体的板面设置。上桨夹转动连接在铰接轴处,使得上桨夹能够以铰接轴的轴心线为轴绕轴转动。上述为铰接方式,本申请实施例竖直式无人机的铰接方式均为此处描述的方式。
[0061]
此处,应当指出的是,以上文描述的上安装座的铰接方式为例,扭簧的一侧与第一座体固定连接,扭簧的另一侧与上旋翼700固定,由此,可以完成在折叠后自动复位。
[0062]
更进一步的,在一种可能的实现方式中,上旋翼桨叶720设有两个,下旋翼桨叶320设有两个。两个上旋翼桨叶720和两个下旋翼桨叶320的设置更加的符合设计理念。
[0063]
在一种可能的实现方式中,还包括gps天线900,gps天线900固定安装在第二电机800与所述主轴500连接的一侧,且gps天线900与所述筒状机身 100内飞控系统电连接。
[0064]
如图1、图2或图3所述,更进一步的,在一种可能的实现方式中,gps 天线900包括整流罩910和天线920,整流罩910呈圆柱状,整流罩910固定安装在第二电机800背离第二电机800的转子的一侧,天线920固定安装在整流罩910的内部,天线920的与筒状机身100内飞控系统电连接。
[0065]
此处,应当指出的是,天线920gps是本领域相关技术人员的公知常识,固此处不做详细赘述。
[0066]
在一种可能的实现方式中,还包括中部壳体和舵机,中部壳体呈圆柱状,中部壳体与主轴500同轴设置,中部壳体设置在上桨毂710和下桨毂310之间。上倾斜器600和下倾斜器400均设置在中部壳体内部,上倾斜器600朝向第二电机800的一侧与中部壳体的内壁抵接,下倾斜器400朝向第一电机200的一侧与中部壳体的内壁抵接。舵机固定安装在中部壳体的内壁上,舵机与上倾斜器600、下倾斜器400均为球形关节传动连接,舵机与筒状机身100电连接。由此,可以通过筒状机身100控制舵机,再由舵机控制上倾斜器600的倾斜和下倾斜器400的倾斜,由此使得上旋翼桨叶720和下旋翼桨叶320能够自动倾斜。
[0067]
此处,应当指出的是,舵机及其与上倾斜器600、下倾斜器400的连接方式是本领域相关技术人员的公知常识,固定此处不做赘述。
[0068]
此处,应当指出的是,以上文描述的上安装座的铰接方式为例,扭簧的一侧与第一座体固定连接,扭簧的另一侧与上旋翼700固定,由此,可以完成在折叠后自动复位。
[0069]
在一种可能的实现方式中,筒状机身100包括下壳体110和云台140,下壳体110呈圆柱状,下壳体110的内部设有电池仓,电池仓适用于固定安装电池,下壳体110的侧壁上设有开口,开口与电池仓相匹配,开口处覆盖有电池盖。下壳体110的外侧壁上设有两个卡爪,两个卡爪设置在开口处,两个卡爪相对设置,电池盖卡接在两个卡爪之间。第一电机200固定安装在下壳体110的一端,云台140固定安装在下壳体110未与第一电机200连接的底端。设置云台140可以方便本申请实施例竖直式无人机安装摄像机及其他负荷。整体做成圆柱状可以进一步的方便携带。
[0070]
此处,应当指出的是筒状机身100内含飞控系统,且飞控系统为本领域人员的常规技术手段,此处不做赘述。
[0071]
更进一步的,在一种可能的实现方式中,筒状机身100还包括连接座120、起落架130和弹回装置,连接座120套接在下壳体110的侧壁上,连接座120的外壁上设有凸台,起落架130与凸台铰接,弹回装置安装在凸台与起落架130 的铰接处。起落架130设有多个,多个起落架130以下壳体110的中轴线为轴圆周阵列分布,凸台的数量与起落架130的数量相匹
配,弹回装置的数量与起落架130的数量相匹配。设置起落架130可以方便本申请实施例竖直式无人机的上升和降落。
[0072]
此处,应当指出的是,连接座120可以通过螺栓与下壳体110固定连接,起落架130为柱体,且起落架130设有伸出凸台的伸出端,且起落架130的伸出端与下壳体110在展开的状态下抵接。此处,还应当指出的是,起落架130 设有三个。
[0073]
更进一步的,在一种可能的实现方式中,所述弹回装置为扭簧。
[0074]
以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术的改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips