
 商标分类
商标分类  商标转让
商标转让 
无人飞行器的机身和具有其的无人飞行器的制作方法
 2021-02-13 10:02:08|
2021-02-13 10:02:08| 243|
243| 起点商标网
起点商标网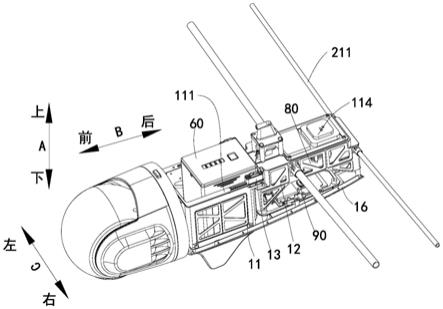
[0001]
本发明涉及飞行领域,具体而言,涉及一种无人飞行器的机身和具有所述无人飞行器的机身的无人飞行器。
背景技术:
[0002]
在无人飞行器中,天线作为实现无线通信功能的重要元件,当时在现在无人飞行器的设计中,其结构越来越趋于紧凑,天线设计受到的限制也越来越多。随着无人飞行器的飞速发展,不仅需要天线的结构紧凑,尺寸有限,同时还需要天线具有多个辐射频段。
[0003]
现有技术中,无人飞行器的天线设计不合理,天线的辐射方向图杂散,进而导致无人飞行器的信号收发能力严重降低。
技术实现要素:
[0004]
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种无人飞行器的机身,该无人飞行器的机身,在使用时,天线设在下盖上,不仅便于天线与地面终端之间进行通讯连接,而且天线可以与下盖一同拆下,便于对天线进行维护和更换,从而提高无人飞行器的工作可靠性。
[0005]
本发明还提出一种具有所述无人飞行器的机身的无人飞行器。
[0006]
为实现上述目的,根据本发明的第一方面的实施例提出一种无人飞行器的机身,所述无人飞行器的机身包括:机身框架和机身外壳,所述机身外壳包覆在所述机身框架上,所述机身框架内设有安装空间,所述机身外壳上设有位于所述安装空间底壁的安装口;下盖,所述下盖可拆卸地设在所述安装口处以打开或封闭所述安装口;通信模块,所述通信模块包括天线,所述天线设在所述下盖上且位于所述安装口内侧。
[0007]
根据本发明实施例的无人飞行器的机身,在使用时,天线设在下盖上,不仅便于天线与地面终端之间进行通讯连接,而且天线可以与下盖一同拆下,便于对天线进行维护和更换,从而提高无人飞行器的工作可靠性。
[0008]
另外,根据本发明上述实施例的无人飞行器的机身还可以具有如下附加的技术特征:
[0009]
进一步地,所述机身外壳具有对称面,所述机身外壳相对于对称面左右对称,所述天线为多个,多个所述天线分布在所述对称面的左右两侧。
[0010]
进一步地,所述下盖上设有向下延伸的支撑脚架,所述支撑脚架内部设有容纳腔,至少一部分所述天线设在所述容纳腔内。
[0011]
进一步地,所述支撑脚架为两个且左右对称设置,每个所述支撑脚架内设有所述容纳腔,每个所述容纳腔内设有所述天线。
[0012]
进一步地,所述容纳腔内的天线竖直放置。
[0013]
进一步地,所述下盖的内壁具有位于所述支撑脚架后侧的容纳槽,一部分所述天线放置在所述容纳槽内。
[0014]
进一步地,所述通信模块还包括数据传输模块,所述天线与所述数据传输模块电连接,所述数据传输模块安装在所述下盖上且位于所述安装口内侧。
[0015]
进一步地,所述下盖包括:基盖,所述基盖可拆卸地设在所述机身框架上;散热件,所述散热件设在所述基盖的内壁上且所述数据传输模块安装在所述散热件上,所述基盖上设有用于对所述散热件进行散热的散热孔。
[0016]
进一步地,所述散热件包括散热基板和散热鳍片,所述散热鳍片设在所述散热基板上且通过所述散热孔伸出所述基盖,所述数据传输模块安装在所述散热基板的内壁上。
[0017]
进一步地,所述散热件和所述数据传输模块之间设有导热胶层。
[0018]
根据本发明的第二方面的实施例提出一种无人飞行器,所述无人飞行器包括:机身,所述机身为根据本发明的第一方面的实施例所述的无人飞行器的机身;两个固定翼,所述两个固定翼对称设在所述机身的相对侧壁上。
[0019]
进一步地,每个所述固定翼包括支杆和翼面,所述支杆固定在所述机身框架上,所述翼面包覆在所述支杆的外侧,所述翼面为轻质材料件。
[0020]
根据本发明实施例的无人飞行器,通过利用根据本发明的第一方面的实施例所述的无人飞行器的机身,在使用时,天线设在下盖上,不仅便于天线与地面终端之间进行通讯连接,而且天线可以与下盖一同拆下,便于对天线进行维护和更换,从而提高无人飞行器的工作可靠性。
[0021]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0022]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0023]
图1是根据本发明实施例的无人飞行器的结构示意图。
[0024]
图2是根据本发明实施例的无人飞行器的结构示意图。
[0025]
图3是根据本发明实施例的无人飞行器的机身的局部结构示意图。
[0026]
图4是根据本发明实施例的无人飞行器的机身的第一固定框的结构示意图。
[0027]
图5是根据本发明实施例的无人飞行器的机身的第一固定框的结构示意图。
[0028]
图6是根据本发明实施例的无人飞行器的机身的第二固定框的结构示意图。
[0029]
图7是根据本发明实施例的无人飞行器的机身的下盖和通信模块的结构示意图。
[0030]
图8是根据本发明实施例的无人飞行器的机身的下盖的基盖的结构示意图。
[0031]
图9是根据本发明实施例的无人飞行器的机身的下盖的基盖的结构示意图。
[0032]
图10是根据本发明实施例的无人飞行器的机身的下盖的散热件的结构示意图。
[0033]
附图标记:无人飞行器100、
[0034]
机身10、机身框架111、
[0035]
第一固定框11、底壁1101、第一侧壁1102、第一前端壁1103、第一后端壁1104、连接壁1105、导向槽1106、锁扣装置13、第一收纳腔110、拆卸口112、
[0036]
第二固定框12、第二前端壁1201、第二后端壁1202、顶壁1203、第二侧壁1204、第二收纳腔120、安装口113、安装孔115、
[0037]
上盖15、下盖16、基盖161、支撑脚架1611、容纳腔16110、容纳槽1612、散热孔1613、散热件162、散热基板1621、散热鳍片1622、
[0038]
蓄电装置60、
[0039]
定位模块114、
[0040]
飞行控制单元80、主板81、惯性测量单元82、走线空间83、
[0041]
通信模块90、数据传输模块91、天线92、
[0042]
固定翼20、支杆211、翼面212、第一翼段21、第二翼段22、固定件23、固定部231、导向孔2310、悬挂部232、环形孔2320、导向杆221、副翼24、
[0043]
第一动力组件30、翼臂31、第一动力单元32、第一螺旋桨33、第二动力组件40、固定座41、第二动力单元42、第二螺旋桨43、尾翼50、尾翼板51、尾撑杆53、尾撑座54、枢接结构55、
[0044]
航拍模块70、
[0045]
机身外壳14、第一安装口1401。
具体实施方式
[0046]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0047]
下面参考附图描述根据本发明实施例的机身10。
[0048]
如图1-图10所示,根据本发明实施例的机身10包括机身框架111、机身外壳14、下盖16和通信模块90。
[0049]
机身外壳14包覆在机身框架111上,机身框架111内设有安装空间,机身外壳14上设有位于所述安装空间底壁的安装口113。下盖16可拆卸地设在安装口113处以打开或封闭安装口113(上下方向如图3中的箭头a所示)。通信模块90包括天线92,天线92设在下盖16上且位于安装口113内侧。
[0050]
根据本发明实施例的机身10,通过设置机身框架11、机身外壳14和下盖16,使下盖16可拆卸地设在安装口113处以打开或封闭安装口113。这样便于机身10内各结构的安装和拆卸,便于提高机身10的装配效率。
[0051]
并且,通过设置通信模块90,使通信模块90包括天线92,天线92设在下盖16上且位于安装口113内侧。这样便于天线92与地面终端之间进行通讯连接,避免机身10内的其他结构对通信模块90造成电磁干扰,提高通信模块90的通讯效果,便于地面终端对无人飞行器100进行控制,提高对无人飞行器100的控制可靠性。
[0052]
同时,这样天线92可以与下盖16一同拆下,便于天线92的拆卸和安装,从而便于对天线92进行维护和更换,提高无人飞行器100的工作可靠性。
[0053]
因此,根据本发明实施例的机身10,在使用时,天线92设在下盖16上,不仅便于天线92与地面终端之间进行通讯连接,而且天线92可以与下盖16一同拆下,便于对天线92进行维护和更换,从而提高无人飞行器100的工作可靠性。
[0054]
下面参考附图描述根据本发明具体实施例的机身10。
[0055]
在本发明的一些具体实施例中,如图1-图10所示,根据本发明实施例的机身10包
括机身框架111、机身外壳14、下盖16和通信模块90。
[0056]
可选地,机身10还包括飞行控制单元80,飞行控制单元80安装在所述安装空间内,飞行控制单元80包括主板81。
[0057]
根据本发明的一些具体实施例,机身框架111内设有安装空间。蓄电装置60设在所述安装空间内。定位模块114设在机身框架111的顶部。飞行控制单元80包括主板81和设在主板81上的惯性测量单元82,主板81固定在所述安装空间内且位于定位模块114的下方,定位模块114与主板81电连接,蓄电装置60与主板81相连以对飞行控制单元80供电。通信模块90包括数据传输模块91和天线92,天线92与数据传输模块91电连接,数据传输模块91位于飞行控制单元80的下方,数据传输模块91与主板81电连接。
[0058]
这里需要理解的是,“定位模块114与主板81电连接”可以为通讯和/或电连接。
[0059]
根据本发明实施例的机身10,通过设置定位模块114,使定位模块114设在机身框架111的顶部。这样便于定位模块114对无人飞行器100进行定位,增强定位模块114的定位功能,提高定位模块114的定位准确性和精度,提高定位模块114的工作可靠性和稳定性,以便于快速准确地确定无人飞行器100的飞行位置。
[0060]
并且,通过设置通信模块90,使通信模块90包括数据传输模块91和天线92,数据传输模块91位于飞行控制单元80的下方。这样便于通信模块90与地面终端之间进行通讯连接,避免机身10内的其他结构对通信模块90造成电磁干扰,提高通信模块90的通讯效果,便于地面终端对无人飞行器100进行控制,提高对无人飞行器100的控制可靠性。
[0061]
此外,通过使蓄电装置60与主板81相连,主板81位于定位模块114的下方,数据传输模块91位于飞行控制单元80的下方。这样便于蓄电装置60通过主板81为定位模块114和数据传输模块91供电,便于蓄电装置60、主板81、定位模块114和数据传输模块91之间实现电连接,简化机身10内的走线结构,使机身10内部的布局更加合理紧凑。
[0062]
具体地,主板81由飞控主板和电源主板的集成而成,惯性测量单元(imu)82设置于主板81上方。
[0063]
在本发明的一些实施例中,如图6所示,通信模块90和主板81之间间隔设置以形成走线空间83。这样便于为数据传输模块91与飞行控制单元80之间的连接线端子预留足够的操作空间和收容空间,便于无人飞行器100的装配成型,便于用户的操作,提高无人飞行器100的组装便捷性。
[0064]
可选地,如图4和图5所示,机身框架111包括第一固定框11和第二固定框12,第一固定框11内设有第一收纳腔110,蓄电装置60设在第一收纳腔110内。第二固定框12内设有第二收纳腔120,第二固定框12设在第一固定框11上,定位模块114固定在第二固定框12上,飞行控制单元80设在第二收纳腔120内。这样便于对蓄电装置60进行定位,以便于蓄电装置60的安装设置,便于对定位模块114和飞行控制单元80进行定位,以便于定位模块114和飞行控制单元80的安装设置,从而提高机身10的装配效率,缩短机身10的装配用时。
[0065]
进一步地,如图6所示,第二固定框12的顶壁设有穿孔,定位模块114的一部分穿过所述穿孔伸出第二固定框12。这样便于使定位模块114的一部分位于第二固定框12的上方,便于定位模块114顺畅地对无人飞行器100进行定位,提高定位模块114的定位准确性和可靠性。
[0066]
具体地,如图6所示,第二固定框12的底壁设有安装口113,飞行控制单元80通过安
装口113安装在第二收纳腔120内。这样便于将飞行控制单元80安装到第二收纳腔120内,进一步提高机身10的装配效率。
[0067]
可选地,如图3所示,第一固定框11设在第二固定框12的前侧(前后方向如图3中的箭头b所示),第一固定框11的顶部设有拆卸口112,蓄电装置60通过拆卸口112可拆卸地设在第一收纳腔110内。这样便于蓄电装置60的安装和拆卸,便于对蓄电装置60进行维修和更换。
[0068]
具体地,第二固定框12的底壁的至少一部分位于第一固定框11的底壁的上方以形成走线空间83。这样便于走线空间83的形成,便于设置更多的操作空间和收容空间,提高机身10内部结构的合理性和整齐性。
[0069]
在本发明的一些实施例中,如图4和图5所示,第一固定框11包括底壁1101、两个第一侧壁1102、第一前端壁1103和第一后端壁1104。底壁1101、两个第一侧壁1102、第一前端壁1103和第一后端壁1104共同限定出顶部具有开口的第一收容腔110,第一收容腔110可以用于收容蓄电装置60。底壁1101、两个第一侧壁1102、第一前端壁1103和第一后端壁1104上开设有减重槽,以减小无人飞行器100的飞行重量。两个第一侧壁1102靠近第一收容腔110开口的端部向外延伸有连接壁1105,连接壁1105与第一侧壁102之间设置有加强肋板。进一步地,连接壁1105的长度方向上开设有贯穿其上下端面的导向槽1106。进一步地,第一固定框11上还设置有用于锁定蓄电装置60的锁扣装置13。锁扣装置13可移动的连接在导向槽1106上。
[0070]
在本发明的一些实施例中,如图6所示,第二固定框12包括第二前端壁1201、第二后端壁1202、顶壁1203以及连接于第二前端壁1201和第二后端壁1020两侧的两个第二侧壁1204。第二前端壁1201、第二后端壁1202、顶壁1203以及两个第二侧壁1204共同围设成下端敞开的第二收容腔120。第二固定框12通过第二前端壁1201固定于第一固定框11的第一后端壁1104上,且第二固定框12的开口下端与第一固定框11的第一后端壁1104之间形成了容置空间。顶壁1203上开设有穿孔,定位模块114适于收容于第二收容腔120内,并固定于顶壁1203内侧,且定位模块114部分结构沿穿孔穿出于第二收容腔120。
[0071]
在本发明的一些实施例中,如图3所示,机身框架111的底壁设有安装口113,下盖16可拆卸地设在机身框架111上以打开或封闭安装口113。通信模块90还包括数据传输模块91,天线92与数据传输模块91电连接,数据传输模块91与主板81电连接,数据传输模块91安装在下盖16上且位于安装口113内侧。这样不仅便于机身10内结构的拆卸和安装,而且数据传输模块91可以随下盖16一同拆下,便于对数据传输模块91进行维护和更换。同时,便于主板81对通信模块90供电。
[0072]
具体地,如图7所示,下盖16包括基盖161和散热件162,基盖161可拆卸地设在机身框架111上,基盖161上设有散热孔1613。散热件162设在基盖161的内壁上且数据传输模块91安装在散热件162上,基盖161上设有用于对散热件162进行散热的散热孔1613。这样便于数据传输模块91将内部的热量传导到散热件162,再利用散热件162向机身10外进行散热,便于提高数据传输模块91的散热效率,提高数据传输模块91的工作性能。
[0073]
可选地,散热件162和数据传输模块91之间设有导热胶层。具体而言,数据传输模块91与安装在散热件162之间通过导热硅脂连接。
[0074]
更为具体地,如图10所示,散热件162包括散热基板1621和散热鳍片1622,散热鳍
片1622设在散热基板1621上且通过散热孔1613伸出基盖161,数据传输模块91安装在散热基板1621的内壁上。这样通过设置散热鳍片1622可以增加散热件162的散热面积,便于散热件162与外界环境进行热交换,以将热量导出机身10外,提高散热件162的散热效果。
[0075]
可选地,天线92安装在下盖16上。这样便于天线92与地面终端之间进行通讯连接,提高天线92与地面终端之间数据传输的准确性和可靠性。
[0076]
在本发明的一些实施例中,如图8所示,下盖16上设有向下延伸的支撑脚架1611,支撑脚架1611内部设有容纳腔16110,至少一部分天线92设在容纳腔16110内。这样便于天线92的安装设置,便于使天线92位于机身10的下部,便于天线92与地面终端进行通讯连接。
[0077]
具体地,支撑脚架1611为两个且左右对称设置(左右方向如图3中的箭头c所示),每个支撑脚架1611内设有容纳腔16110,每个容纳腔16110内设有天线92。这样便于在下盖16的左右两侧均设置天线92,便于提高天线92的通讯稳定性和可靠性。
[0078]
更为具体地,容纳腔16110内的天线92竖直放置。这样进一步便于天线92顺畅工作,提高天线92收发信号的能力,便于天线92与地面终端进行通讯连接,提高天线92的通讯效果。
[0079]
可选地,如图6所示,下盖16的内壁具有位于支撑脚架1611后侧的容纳槽1612,一部分天线92放置在容纳槽1612内。这样便于在下盖16的不同位置设置更多的天线92,便于天线92在下盖16的左右两侧和前后两侧接收和发送信号,避免天线92与地面之间出现通讯不良的情况。
[0080]
根据本发明的可选实施例,如图1所示,机身10还包括上盖15和机身外壳14,机身外壳14包覆在机身框架111上,上盖15和下盖16与机身外壳14呈流线型过度。具体而言,上盖15对机身外壳14上的第一安装口1401进行遮盖及密封,以保证蓄电装置60为无人飞行器100提供安全飞行。下盖16设置于与第二固定框12下端敞开的第二收容腔120开口相对应的第二安装口处。基盖161的下方延伸有两个支撑脚架1611,支撑脚架1611内部设置有容纳腔16110。基盖161的后端两侧设置有容纳槽1612。天线92可以设置于基盖161的后端容纳槽1612和支撑脚架1611内部容纳腔16110内,其中,天线包括4个,天线可以为片状天线或棒状天线。
[0081]
换言之,机身10包括机身框架111和机身外壳14,机身外壳14包覆在机身框架111上,机身框架111内设有安装空间,机身外壳14上设有位于所述安装空间底壁的安装口113。下盖16可拆卸地设在安装口113处以打开或封闭安装口113。天线92设在下盖16上且位于安装口113内侧。机身外壳14上设有位于所述安装空间底壁的安装口113,下盖16可拆卸地设在安装口113处以打开或封闭安装口113。
[0082]
进一步地,定位模块114沿穿孔穿出于第二收容腔120;然后将飞行控制单元80收容于第二收容腔120内,并通过紧固件与第二收容腔120内壁固定;再将通信模块90的数据传输模块91固定于散热壳体162上,以及将固定有数据传输模块91的散热壳体162固定于基盖161上,再将天线92设置于基盖161的后端两侧的容纳槽1612和支撑脚架1611内的容纳腔16110内。最后将散热壳体162和基盖161组成的机身下盖16设置于与第二固定框12下端敞开的第二收容腔120开口相对应的第二安装口处,以将第二安装口密封。
[0083]
在本发明的一些实施例中,机身10的机身外壳14呈流线型,可以减小飞行时的空气阻力。当然,机身10的机身外壳14也可以为其他形状。机身外壳14包裹于机身框架111的
外侧,换言之,机身框架111内嵌于机身壳体14内侧。机身外壳14上开设有与第一收容腔110上端开口相对应的第一安装口1401以及与第二固定框12下端开口相对应的第二安装口,以便于蓄电装置60和其他电子元件的拆装。
[0084]
具体地,机身10为对称设置,机身外壳14具有对称面。机身外壳14相对于对称面左右对称,天线92为多个,多个天线92分布在所述对称面的左右两侧。这样便于使机身10在飞行过程中的受力更加均匀,便于天线92在所述对称面的左右两侧发送和接收信号,便于提高天线92与地面终端之间通讯的稳定性和可靠性。
[0085]
更为具体地,机身10的轴线和无人飞行器100的重心均位于机身10的对称面上。机身10为无人飞行器100的承载件,机身10上或者内部可以设置有电气安装部。蓄电装置60、航拍模块70、飞行控制单元80、定位模块114以及通信模块90等电子元件可以设置于电气安装部内。
[0086]
在本发明的一些实施例中,将定位模块114设置于第二收容腔120内,使定位模块114沿穿孔穿出于第二收容腔120而位于机身10的顶端。大大增强了定位模块的定位功能。飞行控制单元80沿第二收容腔120下端开口穿入第二收容腔120并固定,易于拆装检修,使得无人飞行器100的布局合理。将通信模块90的数据传输模块91固定于散热壳体162上,散热壳体162外表面设有散热鳍片1622,可以将数据传输模块91工作中产生的热量导出机身10外部,再将固定有数据传输模块91的散热壳体162固定于基盖161上,由此,形成了散热壳体162和基盖161组成的下盖16装配体。装配时,只需将下盖16的装配体设置于第二固定框12下端开口相对应的第二安装口上处,再次增加了无人飞行器100布局的合理性、装配的便捷性,组装方便,易于操作。且第二收容腔120的开口下端与第一固定框11的第一后端壁1104之间形成了走线空间83,为数据传输模块91与飞行控制单元80之间的连接线端子预留了操作空间和收容空间,组装方便。天线92设置于基盖161的后端两侧的容纳槽1612和支撑脚架1611内部的容纳腔16110内。使得天线92便于与地面终端之间的通讯连接。
[0087]
下面描述根据本发明实施例的无人飞行器100。根据本发明实施例的无人飞行器100包括机身10和两个固定翼20,机身10为根据本发明上述实施例的无人飞行器的机身10,两个固定翼20对称设在机身10的相对侧壁上。
[0088]
具体地,如图3所示,每个固定翼20包括支杆211和翼面212,支杆211固定在机身框架111上,翼面212包覆在支杆211的外侧,翼面212为轻质材料件。这样不仅便于增强固定翼20的结构强度和可靠性,而且便于降低固定翼20的重量,从而减小无人飞行器100的重量。
[0089]
这里需要理解的是,轻质材料是一种新型复合材料,它以耐碱玻璃纤维作增强材,硫铝酸盐低碱度水泥为胶结材并掺入适宜集料构成基材,通过喷射、立模浇铸、挤出、流浆等工艺制成的新型无机复合材料,以取代石子、沙子等,可以大大减轻重量。
[0090]
进一步地,第二固定框12上设有安装孔115,支杆211穿设在安装孔115内。这样便于支杆211的安装设置,提高支杆211的安装稳定性,从而便于固定翼20的安装设置,提高固定翼20的装配效率,提高固定翼20的设置稳定性和可靠性。
[0091]
具体地,如图1所示,两个固定翼20分别对称安装在机身10的对称面的两侧,当无人飞行器100达到一定水平飞行速度后,固定翼20为无人飞行器100提供足够的升力,保证无人飞行器100能够正常飞行。每一个固定翼20包括相互连接的第一翼段21和第二翼段22。当然,在其他实施例中,每一个固定翼20并不限于包括第一翼段21和第二翼段22,根据无人
飞行器100的尺寸设计,每一个固定翼20还可以包括第三翼段、第四翼段等,该些翼段之间的连接与第一翼段21和第二翼段22的连接方式相同。
[0092]
该第一翼段21包括连接于机身10的第一端以及与第一端相背的第二端,具体地,第一翼段21包括两支杆211和翼面212。两支杆211的一端分别固定于第二固定框12的第二侧壁上。翼面212包裹于两支杆221外侧,并与机身外壳14连接。翼面212可以为泡沫等轻质材料,以减小无人飞行器100重量。生产加工时,翼面212和机身外壳14可以一体成型,且翼面212和机身外壳14之间形成为流线型过渡,可以减小飞行时的空气阻力。
[0093]
进一步地,如图1所示,固定翼20还包括固定件23,固定件23固定于第一翼段21上的第二端。固定件23包括固定部231,固定部231整体呈长方形且其侧壁上形成有两个配合孔,两个支杆211远离机身10的一端与第一翼段21的第二端相连。从而可以减少整个无人飞行器100所占用的体积空间,以便于存放以及携带。
[0094]
具体而言,固定部231远离第一翼段21的侧面上开设有导向孔2310,该第二翼段22的第一端相对的一侧面设有导向杆221,以使第二翼段22的第一端匹配于固定部231远离第一翼段21的装配位置时,通过导向杆221与导向孔2310的连接,可以为第二翼段22连接于第一翼段21提供强度,增强第二翼段22与第一翼段21连接的刚性。
[0095]
当然,在本申请可选实施例中,固定部231远离第一翼段21的侧面上开设有导向杆221,该第二翼段22的第一端221相对的一侧面设有导向孔2310。
[0096]
在又一实施例中,导向杆221可以为第一翼段21的两支杆211,第一翼段21的两支杆211远离机身10的一端穿出于固定部231远离第一翼段21的侧面。该第二翼段22的第一端221相对的一侧面上设有导向孔2310。通过将导向杆2310插入导向孔2310以实现第一翼段21和第二翼段22的固定。
[0097]
根据本发明的一些实施,相对应地,第二翼段22上还设有锁配件(未图示)。其中,在第二翼段22在连接于固定部231时,固定部231与第二翼段22上的锁配件配合锁定,该锁配件还可以为第二翼段22提供支撑力,以增强第二翼段22与固定件23的连接强度。
[0098]
第二翼段22的第二端设置为一翼尖小翼。翼尖小翼与第二翼段22之间形成一个夹角,用以阻碍第二翼段22上下表面的空气绕流,减少绕流对升力的破坏。
[0099]
第二翼段22后沿位置还设置有副翼24。副翼24能够相对固定翼20和机身10上下翻转,以实现控制无人飞行器100的飞行姿态。副翼24包括相背的上表面及下表面,副翼24的上表面与第二翼段22的顶面大致平齐,副翼24的下表面与第二翼段22的底面大致平齐。
[0100]
在本发明的一些实施例中,第一翼段21内设有舵机,用以控制副翼24的翼面,从而可以控制无人飞行器100的飞行方向。具体而言,舵机设置于第一翼段21或者固定部231上,舵机的输出轴沿固定部231的侧壁穿出,并通过连接组件25与副翼24连接以驱动副翼24转动。
[0101]
在本发明的一些实施例中,如图1所示,无人飞行器100还包括第一动力组件30、第二动力组件40、尾翼50、航拍模块70。
[0102]
具体地,如图1所示,第一动力组件30设于第一翼段21上,用于为无人飞行器100提供垂直起降的飞行动力,可以使无人飞行器100垂直起降。具体地,该第一动力组件30包括连接于第一翼段21上的翼臂31、连接于翼臂31的第一动力单元32、以及连接于第一动力单元32上的第一螺旋桨33。其中,翼臂31包括两个,两个该翼臂31分别对称的设置于机身10两
侧,且两翼臂31的轴向方向与无人飞行器100的机头朝向机尾的方向一致。
[0103]
具体而言,固定件23还包括悬挂部232,悬挂部232沿固定部231向下延伸而成。悬挂部232形成为环形状且其内部形成有环形孔2320。翼臂31穿设于悬挂部232的环形孔2320内。第一动力单元32包括四个,四个第一动力单元32分别固定于两个翼臂31的端部位置。
[0104]
进一步地,该翼臂31内设有线路通道(未图示),用以容纳连接于第一动力单元32与第一翼段21之间的线缆,从而通过第一翼段21内的电路为第一动力单元32提供电源。另外,该线缆还包括通信线缆,通过通信线缆的连接可以使机身10获取螺旋桨的转速等信息。
[0105]
如图1所示,第二动力组件40包括固定座41以及设置在固定座41上的第二动力单元42、以及连接于第二动力单元42上的第二螺旋桨43,其中,固定座41整体呈柱台形的壳体状,以与机身外壳12的形状适配。固定座41内形成有安装腔体,调节第二动力单元42的电调装置可以设置于安装腔体内。固定座41适于固定于第二固定框12的第二后端壁上。
[0106]
如图1和图2所示,尾翼50包括两个呈倒v型设置的尾翼板51,两个尾翼板51相互枢接,也就是说,两个尾翼板51可以相互折叠。尾翼50拆装下来时可以减少尾翼50的收藏空间。尾翼板51后缘安装有活动舵面,倒v尾翼兼具普通固定翼垂尾与平尾的功能,结构重量小,控制效率高;当然在其他实施例中,尾翼50也可以采用双垂尾或其他构型的尾翼。
[0107]
在本发明的一些实施例中,尾翼50通过尾撑杆53和尾撑座54固定连接于翼臂31的后端部,具体而言,尾撑杆53包括两个,两个尾撑杆53分别设置于翼臂31后端,并与翼臂31同轴设置,且两个尾撑杆53通过枢接结构55与翼臂31的后端部枢接。尾撑座54连接于尾撑杆53远离机身10的端部。
[0108]
可选地,航拍模块70设置于机身10的前方位置,并与第一固定框11固定连接。
[0109]
根据本发明实施例的无人飞行器100。该无人飞行器100不仅能够以零速度起飞着陆,具备悬停能力,而且水平飞行速度大,能以固定翼飞行的方式水平飞行。该无人飞行器100可以用于航拍测绘、电力巡检、环境监测和灾情巡查等领域。
[0110]
根据本发明实施例的无人飞行器100,通过利用根据本发明上述实施例的无人飞行器的机身10,在使用时,天线92设在下盖16上,不仅便于天线92与地面终端之间进行通讯连接,而且天线92可以与下盖16一同拆下,便于对天线92进行维护和更换,从而提高无人飞行器100的工作可靠性。
[0111]
根据本发明实施例的无人飞行器100的其他构成以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
[0112]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。在本发明的描述中,第一特征在第二特征“之上”或“之下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。
[0113]
在本发明的描述中,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征
在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。
[0114]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0115]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0116]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips