
 商标分类
商标分类  商标转让
商标转让 
一种基于空间绳系立方体卫星的攀爬系统的制作方法
 2021-02-13 07:02:12|
2021-02-13 07:02:12| 374|
374| 起点商标网
起点商标网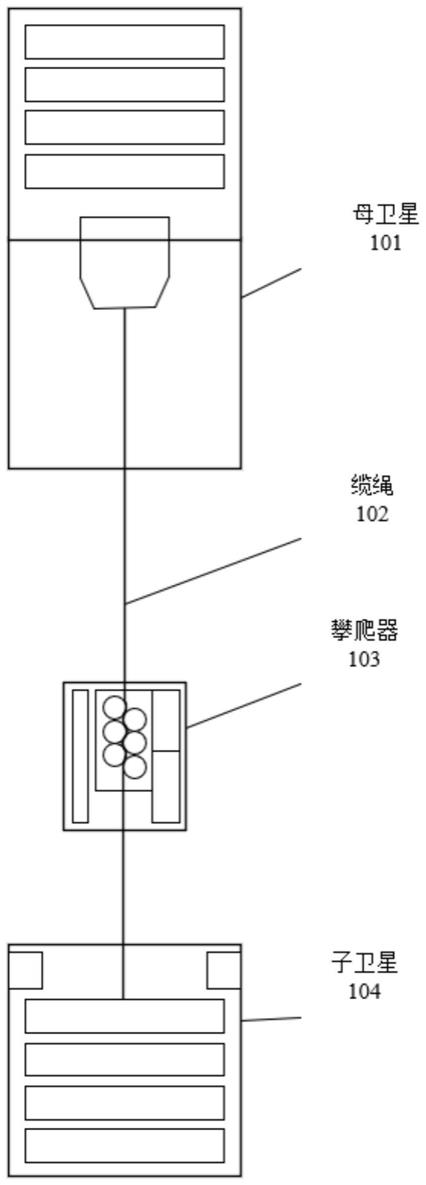
[0001]
本发明提供一种基于空间绳系立方体卫星的攀爬系统,它涉及绳系卫星及其攀爬系统领域,具体而言涉及一种基于空间绳系立方体卫星的攀爬系统领域。
背景技术:
[0002]
随着卫星的相关技术日趋成熟,卫星在实际应用中也不断地发挥作用,而伴随卫星的功能被深入地挖掘、新的空间任务被不断地提出,相关性卫星的应用范围就受到了限制。在这种情况下,空间绳系卫星系统也就应运而生了。空间绳系卫星系统的主体是一条长缆绳,一端固定连接在母卫星平台,另一端连接子卫星,整个缆绳保持绷紧。该系统具有独特的应用价值,其中包括:通过缆绳释放有效载荷以及对空间有效载荷进行回收与废物处理;缆绳系统的利用使微重力环境的随意控制成为可能,从而可以进行高效率的太空生产;电动力学缆绳可以作为电源进行发电;通过缆绳太空中的能量与物质可以进行传送等。
[0003]
但绳系卫星系统是一种空间展开结构,在将卫星系统发射到太空后,还需要进行缆绳展开的任务。并且缆绳长度较大而直径较小,容易受到太空环境影响而失效,必须及时地进行检测和更换。并且普通卫星质量大,体积大,造价昂贵,搭载机会很难得;相反,立方体卫星具有模块化、经济性的优点,发展前景极佳。针对这一问题,本发明提出了一种基于空间绳系立方体卫星的攀爬系统。
技术实现要素:
[0004]
本发明主要目的在于提供一种基于空间立方体绳系卫星的攀爬系统,以适应未来需要提高空间探测与试验能力。
[0005]
本发明是一种基于空间绳系立方体卫星的攀爬系统,它是由母卫星(101)、缆绳(102)、攀爬器(103)和子卫星(104)组成的;它们之间的相互关系是母卫星(101)的下端连接缆绳(102),攀爬器(103)的滚轮夹持着该缆绳(102)并使缆绳(102)从攀爬器(103)内部穿过,缆绳(102)的下部连接着子卫星(104)的顶端;
[0006]
所述母卫星(101)是由母星整体框架(201)、测控通讯系统(202)、姿态控制系统(203)、母星蓄电池(204)、母星星载计算机(205)、母星太阳能电池板(206)和储线罐(207)组成;他们相互之间的关系是:该测控通讯系统(202)位于母星整体框架(201)顶部,该姿态控制系统(203)位于测控通讯系统(202)下方并与母星整体框架(201)固连,该母星蓄电池(204)位于姿态控制系统(203)下方的母星整体框架(201)内部,母星星载计算机(205)位于母星蓄电池(204)下方并与母星整体框架(201)固连,该母星太阳能电池板(206)位于母星整体框架(201)的四个外表面并与母星整体框架(201)固连,储线罐(207)位于母星星载计算机(205)下方并与整母星体框架(201)固连;
[0007]
该母星整体框架(201)的结构是两个单位(2unit)刚性的桁架立方体结构;它是整个母卫星(101)的支撑结构,具有抵抗空间辐射与微流星撞击、保持卫星形态结构和保护内部系统的功能;
[0008]
该测控通讯系统(202)是一个具有遥测、遥控和通信功能的设备,它具有对地通讯、导航定位、与子卫星(104)通讯等功能;
[0009]
该姿态控制系统(203)是一个可感知姿态、计算和控制姿态的设备,它具有完成姿态计算、确定和控制并实现卫星系统姿态稳定等功能;
[0010]
该母星蓄电池(204)是一个储存能量的设备,它具有将太阳能电池板所产生的电能转化为化学能储存并在需要的时候为星上设备提供能源的功能;
[0011]
该母星星载计算机(205)是一个处理数据、控制系统及储存数据的设备;它具有控制绳系系统展开及攀爬、处理及储存攀爬过程中产生的数据的功能;
[0012]
该母星太阳能电池板(206)的结构是由太阳能电池贴片组成的薄板结构;它具有为星上设备提供能源的功能;
[0013]
该储线罐(207)的结构是下方开口,内容有卷轴的筒形缸体结构;见附图7;它具有将缆绳(102)储存在内、将攀爬器(103)固定在其下部、让缆绳(102)在展开时不被甩出等功能;
[0014]
所述缆绳(102)是一根具有超高强度和一定柔性的编织细绳;该编织绳的编织材料为具有超高强度极限的纳米材料(501),该纳米材料(501)可以为碳纳米管、凯夫拉、迪尼玛(dyneema)或其它相似材料;该缆绳(102)的外部喷涂了防护材料(502)层,该防护材料(502)具有抗腐蚀、抵抗空间辐射与微流星撞击的功能;见附图3;
[0015]
所述攀爬器(103)是由攀爬器外框架(301)、控制电路板(302)、驱动电机(303)、攀爬器蓄电池(304)和滚轮及传动系统(305)组成;他们的关系是:控制电路板(302)位于攀爬器外框架(301)左侧并与攀爬器外框架(301)固连,滚轮及传动系统(305)位于攀爬器外框架(301)内部中间并与攀爬器外框架(301)固连,驱动电机(303)位于攀爬器外框架(301)右侧上部并与攀爬器外框架(301)固连,驱动电机(303)转轴滚轮及传动系统(305)相连接,攀爬器蓄电池(304)位于攀爬器外框架(301)右侧下部并与攀爬器外框架(301)固连;
[0016]
该攀爬器外框架(301)的结构是刚性的薄壁外壳,外壳上下两表面有可供缆绳(102)穿过的小孔,见附图8;它是攀爬器(103)的支撑结构,具有抵抗空间辐射与微流星撞击、使攀爬器(103)保持形态结构和保护内部系统的功能;
[0017]
该控制电路板(302)是一个具有收发信号、控制攀爬功能的设备,用于控制攀爬器(103)的所有功能及活动;其结构主体为比母星星载计算机(205)更小的电路板,其上有对应传感器、处理器及数据存储等芯片,见附图9;
[0018]
该驱动电机(303)是一个驱动攀爬器(103)进行运动的电动机,用于驱动滚轮的旋转方向及控制转动速度;该驱动电机(303)为具有空间工作能力,体积小巧,转速可控,转矩较大的伺服电机;
[0019]
该攀爬器蓄电池(304)是一个储存能量的设备,它具有将储存的化学能转化为电能,为攀爬器(103)电路和驱动电机(303)提供能源的功能;
[0020]
该滚轮及传动系统(305)是一个可进行传动和可沿着缆绳(102)攀爬、使缆绳(102)展开速度受到控制的设备,它可将驱动电机(303)的运动传递到滚轮,使滚轮与缆绳(102)摩擦进而带动攀爬器(103)进行攀爬以及辅助展开;其结构是:在长方形基板正面安置有六个表面带有凹槽的滚轮,滚轮间的角度为45度,基板背面为与滚轮对应的齿轮组,齿轮组与驱动电机(303)相连,用于将驱动电机(303)的力矩传递给滚轮,见附图10;
[0021]
所述子卫星(104)是由子星整体框架(401)、绳系弹射装置(402)、姿控集成模块(403)、子星太阳能电池板(404)、子星星载计算机(405)、子星蓄电池(406)、测控通讯模块(407)组成;他们的关系是:绳系弹射装置(402)位于子星整体框架(401)上方,其下为姿控集成模块(403)并与整体框架固连;姿控集成模块(403)下方为子星星载计算机(405);子星蓄电池(406)位于子星星载计算机(405)下方并与整体框架固连,测控通讯模块(407)位于子星整体框架(401)下部,并与子星整体框架(401)固连;子星太阳能电池板(404)位于子星整体框架(401)的四个外表面;
[0022]
该子星整体框架(401)的结构是一个单位(1unit)刚性的桁架立方体结构;它是整个子卫星(104)的支撑结构,具有抵抗空间辐射与微流星撞击、保持卫星形态结构和保护内部系统的功能;
[0023]
该绳系弹射装置(402)是一个储存弹簧机械能的结构,它具有在需要母卫星(101)和子卫星(104)进行分离操作的时候释放弹簧,将子卫星(104)弹出并将缆绳(102)带出的作用;该绳系弹射装置(402)的结构情况是:该装置总体是一较扁的长方体型,最下方为一块平板;在该平板的左右两边分别设置两套垂直于平板的被压缩的弹簧机构,平板中间为一电机,电机与齿轮相连;当电机启动使齿轮转动到一定角度时,被压缩的弹簧机构会被释放,此时,弹力会作用在母卫星(101)上使子卫星(104)弹出,见附图11;
[0024]
该姿控集成模块(403)是一个可感知姿态、计算和控制姿态的设备,它具有完成姿态确定和控制的计算、实现子卫星(104)系统姿态稳定等功能;
[0025]
该子星太阳能电池板(404)的结构是由太阳能电池贴片组成的薄板结构;它具有为星上设备提供能源的功能;
[0026]
该子星星载计算机(405)是一个处理数据、控制系统及储存数据的设备,它具有控制子卫星(104)分离、进行定位和和处理数据的功能;
[0027]
该子星蓄电池(406)是一个储存能量的设备,它具有将储存的化学能转化为电能,为子卫星(104)上设备提供能源的功能;
[0028]
该测控通讯模块(407)是一个具有遥测、遥控和通信功能的设备,它具有对地通讯、导航定位、与母卫星(101)通讯等功能。
[0029]
本发明的优点在于:
[0030]
1、本发明使用立方星平台及小型攀爬器,具有质量轻、体积小及经济可行的优点,具有广阔的应用前景。
[0031]
2、本发明除可完成绳系卫星展开及攀爬试验以外还可以进行验证绳系系统稳定性、绳系材料的空间特性等试验,为下一步的大规模太空绳系系统甚至太空天梯提供理论和实践指导经验。
[0032]
3、本发明所述的攀爬系统结构科学,工艺性好,具有广阔推广应用价值。
附图说明
[0033]
图1为本发明整体结构图。
[0034]
图2为本发明所述母卫星内部构造概念图。
[0035]
图3为本发明所述子卫星内部构造概念图。
[0036]
图4为本发明所述攀爬器内部构造概念图。
transceiver)或类似的产品,它是一个完整的双工系统,具有遥测、遥控和通信功能。
[0056]
该姿态控制系统203是一个可感知姿态、计算和控制姿态的设备,它具有完成姿态计算、确定和控制并实现卫星系统姿态稳定等功能;该姿态控制系统203选用现有产品;选用的型号是isis公司的磁力矩器板(magnetorquer board)或类似的产品;
[0057]
该母星蓄电池204是一个储存能量的设备,它具有将太阳能电池板所产生的电能转化为化学能储存并在需要的时候为星上设备提供能源的功能;其型号为电池模块710-01006(battery module 710-01006)或类似的产品;
[0058]
该母星星载计算机205是一个处理数据、控制系统及储存数据的设备;它具有控制绳系系统展开及攀爬、处理及储存攀爬过程中产生的数据的功能;其型号为立方体计算机(cube-computer)或类似的产品;
[0059]
该母星太阳能电池板206的结构是由太阳能电池贴片组成的薄板结构;它具有为星上设备提供能源的功能;其选用的型号为isis提供的立方卫星太阳能电池板(cubesat solar panels)或类似的产品;
[0060]
该储线罐207的结构是下方开口,内容有卷轴的筒形缸体结构,见附图7;它具有将缆绳102储存在内、将攀爬器103固定在其下部、让缆绳102在展开时不被甩出等功能;该储线罐207的结构情况是:储线罐207的内部为带有驱动装置的卷轴,在系统进行子卫星104和母卫星101的分离展开时,该卷轴按照指定速度开始转动,使得缠绕在卷轴上的缆绳102逐渐释放展开;卷轴周围为储线罐207的外壳,该外壳比卷轴稍大,下方存在一个较小的开口,可使缆绳102从开口的方向展开;
[0061]
所述缆绳102,是一根具有超高强度和一定柔性的编织细绳;该编织绳的编织材料为具有超高强度极限的纳米材料501,该纳米材料501可以为碳纳米管、凯夫拉、迪尼玛(dyneema)或其它相似材料;该缆绳外部喷涂了防护材料502层,该防护材料502具有抗腐蚀、抵抗空间辐射与微流星撞击的功能,见附图3;
[0062]
所述攀爬器103,见附图4,是由攀爬器外框架301、控制电路板302、驱动电机303、攀爬器蓄电池304和滚轮及传动系统305组成;他们的关系是:控制电路板302位于攀爬器外框架301左侧并与攀爬器外框架301固连,滚轮及传动系统305位于攀爬器外框架301内部中间并与攀爬器外框架301固连,驱动电机303位于攀爬器外框架301右侧上部并与攀爬器外框架301固连,驱动电机303转轴滚轮及传动系统305相连接,攀爬器蓄电池304位于攀爬器外框架301右侧下部并与攀爬器外框架301固连;
[0063]
该攀爬器外框架301的结构是刚性的薄壁外壳,外壳上下两表面有可供缆绳102穿过的小孔,见附图8;它是攀爬器103的支撑结构,具有抵抗空间辐射与微流星撞击、使攀爬器103保持形态结构和保护内部系统的功能;
[0064]
该控制电路板302是一个具有收发信号、控制攀爬功能的设备,用于控制攀爬器103的所有功能及活动;其结构主体为比母星星载计算机205更小的电路板,其上有对应传感器、处理器及数据存储等芯片,见附图9;
[0065]
该驱动电机303是一个驱动攀爬器103进行运动的电动机,用于驱动滚轮的旋转方向及控制转动速度;该驱动电机303为具有空间工作能力,体积小巧,转速可控,转矩较大的伺服电机;它可以选用汉德保电机公司的现有产品,其型号是43mm系列空心杯直流无刷电机或类似的产品;
[0066]
该攀爬器蓄电池304是一个储存能量的设备,它具有将储存的化学能转化为电能,为攀爬器103电路和驱动电机303提供能源的功能;它可以选用现有产品,其型号为exa ba0x高能量密度电池组(exa ba0x high energy density battery array)或类似的产品;
[0067]
该滚轮及传动系统305是一个进行传动和可沿着缆绳102攀爬、使缆绳102展开速度受到控制的设备,它可将驱动电机303的运动传递到滚轮,使滚轮与缆绳102摩擦进而带动攀爬器103进行攀爬以及辅助展开;其结构是:在长方形基板正面安置有六个表面带有凹槽的滚轮,滚轮间的角度为45度,基板背面为与滚轮对应的齿轮组,齿轮组与驱动电机303相连,用于将驱动电机303的力矩传递给滚轮,见附图10;
[0068]
所述子卫星104,见附图5,是由子星整体框架401、绳系弹射装置402、姿控集成模块403、子星太阳能电池板404、子星星载计算机405、子星蓄电池406、测控通讯模块407组成;他们的关系是:绳系弹射装置402位于子星整体框架401上方,其下为姿控集成模块403并与整体框架固连。姿控集成模块403下方为子星星载计算机405。子星蓄电池406位于子星星载计算机405下方并与整体框架固连,测控通讯模块407位于子星整体框架401下部,并与子星整体框架401固连。子星太阳能电池板404位于子星整体框架401的四个外表面;
[0069]
该子星整体框架401的结构是一个单位(1unit)刚性的桁架立方体结构;它是整个子卫星104的支撑结构,具有抵抗空间辐射与微流星撞击、保持卫星形态结构和保护内部系统的功能;该子星整体框架401可选用isis公司的1单位立方星结构(1-unit cubesat structure)或类似的结构;
[0070]
该绳系弹射装置402,见附图11,是一个储存弹簧机械能的结构,它具有在需要母卫星101和子卫星104进行分离操作的时候释放弹簧,将子卫星104弹出并将缆绳102带出的作用;该绳系弹射装置402的结构情况是:该装置总体是一较扁的长方体型,最下方为一块平板。在该平板的左右两边分别设置两套垂直于平板的被压缩的弹簧机构,平板中间为一电机,电机与齿轮相连。当电机启动使齿轮转动到一定角度时,被压缩的弹簧机构会被释放,此时,弹力会作用在母卫星101上使子卫星104弹出;
[0071]
该姿控集成模块403是一个可感知姿态、计算和控制姿态的设备,它具有完成姿态确定和控制的计算、实现子卫星104系统姿态稳定等功能;子卫星104上采用集成的磁力矩姿控系统为isis公司的磁力矩器板(magnetorquer board)或类似的产品;
[0072]
该子星太阳能电池板404的结构是由太阳能电池贴片组成的薄板结构;它具有为星上设备提供能源的功能;它可以选用现有产品,其型号为isis提供的立方卫星太阳能电池板(cubesat solar panels)或类似的产品;
[0073]
该子星星载计算机405是一个处理数据、控制系统及储存数据的设备,它具有控制子卫星104分离、进行定位和和处理数据的功能;其型号为立方体计算机(cube-computer)或类似的产品;
[0074]
该子星蓄电池406是一个储存能量的设备,它具有将储存的化学能转化为电能,为子卫星104上设备提供能源的功能;它可以选用现有产品,其型号为电池模块710-01006(battery module 710-01006)或类似的产品;
[0075]
该测控通讯模块407是一个具有遥测、遥控和通信功能的设备,它具有对地通讯、导航定位、与母卫星101通讯等功能;其型号为gpsrm 1全球定位系统接收机模块710-00908(gpsrm 1gps receiver module 710-00908)或类似的产品;
[0076]
在进行空间绳系立方体卫星的展开及攀爬任务时,整个基于空间绳系立方体卫星的攀爬系统由航天运载器送入预定轨道,此时,子卫星104和母卫星101未展开,攀爬器103储存在子母卫星间。系统首先进行子卫星104和母卫星101的分离展开。在母卫星101星载计算机的控制下,子卫星104的绳系弹射装置402释放弹簧,将子卫星104弹出,并将缆绳102带出。此时,储存在母卫星101的储线罐207中的缆绳102开始以一定的速度释放。在释放过程中,攀爬器103始终与母卫星101固连,缆绳102穿过攀爬器103的滚轮。此时通过对攀爬器103滚轮的转速的控制,便可慢慢降低缆绳102展开速度,避免由于展开速度太大而产生将缆绳102拉断、回弹等不可控的情况。通过减少攀爬器103滚轮的转速,使缆绳102展开到接近完全之时,速度减为零,确保展开时的安全。当系统完全展开时,让攀爬器103受控与母卫星101脱离,驱动滚轮使攀爬器103能够沿着由于重力梯度效应而张紧的缆绳102进行攀爬。在攀爬过程中,攀爬器103上设备可对缆绳102进行探测拍照,研究其在太空中的性质,以达到对缆绳102进行检修检测的目的。
[0077]
本实施例是适用本发明的一个较好的实例,但并不局限于此,本领域其它技术人员可根据本发明所述结构做出不同引申和变化,但只要不脱离本发明所述之发明主旨,都在本发明的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips