
 商标分类
商标分类  商标转让
商标转让 
一种适用于太空出舱活动的手持式对接机构的制作方法
 2021-02-13 07:02:42|
2021-02-13 07:02:42| 271|
271| 起点商标网
起点商标网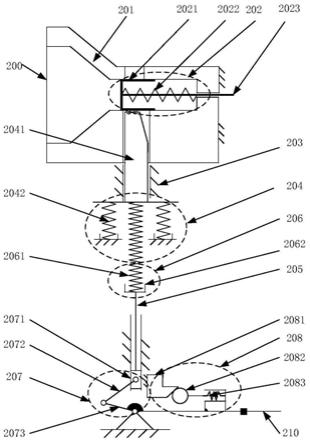
[0001]
本发明涉及一种对接结构,具体涉及一种适用于航天员太空出舱活动的有效载荷与航天器在轨装配的手持式对接机构,属于在轨维护与构建领域。
背景技术:
[0002]
随着近年来我国航天技术的发展,空间有效载荷性能指标不断提高,空间有效载荷的结构体积日益增大、复杂度日益增加,现有运载工具与展开机构难以满足外形包络与维修升级更换等需求,迫切需要开展在轨维护与构建任务。空间站作为载人航天器的典型代表,其在轨飞行期间,航天员进行太空出舱活动并开展在轨维护与构建任务,可通过手持式对接机构将空间有效载荷与航天器进行捕获对接与锁紧解锁,具有操作便捷、功能丰富、任务多样、适用性强、可重复使用等特点,可极大拓展空间试验能力,满足多种任务需求。
[0003]
针对空间有效载荷与航天器的对接机构,现有技术主要采用机械臂辅助、电机驱动的方式,实现捕获对接、锁紧、解锁等功能,机构复杂,可靠性较低,难以维护更换。当涉及太空出舱活动时,传统的空间有效载荷与航天器对接机构,难以适应航天员单手操作、换手操作、操作力有限、多人同步、可重复使用、任务时序间隔大等工作特点,迫切需要研制一种适用于太空出舱活动的手持式对接机构。
[0004]
目前国内涉及太空出舱活动的空间有效载荷与航天器对接机构相关专利如下。兰州空间技术物理研究所:一种适用于空间飞行器舱外把手的连接装置(cn105151323a)、适用于空间飞行器舱外把手和暴露载荷之间的连接装置(cn105173122a)。兰州空间技术物理研究所涉及的专利,采用舱外把手的操作方式,通过航天员转动把手、引起导向槽旋转,推动导向驱动销运动至不同位置,实现空间载荷与连接装置的锁紧与解锁。该连接装置机构较为复杂,采用球头方式固定空间载荷,受限于航天员操作力难以施加较大预紧力,连接刚度相对较弱,可靠性相对较低;缺少相应的状态标识,人机工效学有待提升;与空间载荷连接的捕获容差范围小,对接精度不高。
技术实现要素:
[0005]
有鉴于此,本发明提供一种适用于太空出舱活动的手持式对接机构,由航天员单手或双手手持操作,实现空间有效载荷与航天器的捕获、对接、锁紧、解锁、解锁维持与分离。
[0006]
所述的手持式对接机构包括:被动端和主动端;
[0007]
所述被动端包括:安装座;所述安装座的对接端面上设置有外凸对接柱,对接柱用于和所述主动端对接座上的对接孔配合,实现所述被动端和主动端的对接;所述对接柱上设置有锁定孔a;
[0008]
所述主动端包括:对接座、滑动托柱组件、握持筒壳体组件、锁定销组件、连接轴、碟簧预紧组件、曲柄滑块机构、解锁维持机构和操作手柄;
[0009]
所述对接座上设置有贯通所述对接孔的锁定孔b;当所述对接柱与所述对接孔对
接后,所述锁定孔a和锁定孔b同轴连通;
[0010]
所述握持筒壳体组件一端与所述对接座固接,所述握持筒壳体组件为所述锁定销组件、连接轴、碟簧预紧组件和曲柄滑块机构提供安装外壳;
[0011]
所述滑动托柱组件位于所述对接座的对接孔内,所述滑动托柱组件能够在所述对接孔内轴向伸缩,其处于伸长状态时,堵住所述锁定孔b,约束所述锁定销组件的初始位置;当所述对接柱与所述对接孔对接时,压缩所述滑动托柱组件;
[0012]
所述锁定销组件能够在所述握持筒壳体组件内部轴向伸缩,所述锁定销组件用于在所述被动端和主动端对接后,伸入所述锁定孔a和锁定孔b内,对所述被动端和主动端进行位置锁定;
[0013]
所述碟簧预紧组件一端与所述锁定销组件相连,另一端通过连接轴与所述曲柄滑块机构中的滑块相连;所述滑块与握持筒壳体组件滑动配合;通过所述碟簧预紧组件和曲柄滑块机构为所述锁定销组件提供预紧力;
[0014]
所述操作手柄和所述曲柄滑块机构中的曲柄相连,通过所述操作手柄带动所述曲柄转动;
[0015]
所述解锁维持机构设置在所述曲柄上,用于在所述锁定销组件处于解锁状态时,通过阻碍操作手柄的转动来保持所述锁定销组件的解锁位置。
[0016]
作为本发明的一种优选方式:所述滑动托柱组件包括:滑动托柱、滑动托柱弹簧和托柱导向杆;所述滑动托柱同轴套装在所述对接孔内,与所述对接孔滑动配合;所述托柱导向杆一端与所述滑动托柱固接,另一端伸出所述对接座;所述滑动托柱弹簧套装在托柱导向杆外部,一端与所述滑动托柱连接,另一端与所述对接孔的内底面连接,所述滑动托柱在所述对接孔内滑动时带动滑动托柱弹簧压缩。
[0017]
作为本发明的一种优选方式:所述锁定销组件包括:锁定销和锁定销弹簧;所述锁定销上端通过斜面与所述锁定孔a的内斜面配合;一个以上所述锁定销弹簧一端与固定在所述锁定销底部的挡板连接,另一端与弹簧隔板连接,所述弹簧隔板与所述握持筒壳体组件固接;所述锁定销与所述握持筒壳体组件滑动配合,当所述锁定销组件用于在所述被动端和主动端对接后,所述锁定销伸入所述锁定孔a和锁定孔b内。
[0018]
作为本发明的一种优选方式:所述锁定销上表面通过滚柱螺钉安装有可自由转动滚柱。
[0019]
作为本发明的一种优选方式:所述碟簧预紧组件包括:碟簧筒和碟簧组;所述碟簧组由一个以上串联在一起的碟簧形成;所述碟簧组的下端套装在所述碟簧筒内部,与所述碟簧筒内底面固接,上端与所述锁定销组件相连;所述碟簧筒下端与通过所述连接轴与所述滑块相连。
[0020]
作为本发明的一种优选方式:在所述碟簧筒内部,碟簧组下端与所述碟簧筒内底面之间套装有碟簧调整垫片;通过调整所述碟簧调整垫片的厚度调整所述碟簧预紧组件所提供的预紧力。
[0021]
作为本发明的一种优选方式:所述解锁维持机构设置在所述曲柄与所述操作手柄相连一侧的上端面,包括:斜块、球挡、球筒和解锁维持弹簧;
[0022]
所述斜块固定在所述握持筒壳体组件侧壁,所述斜块上端设有外凸三棱柱,用于对所述球挡产生阻力,通过该阻力阻碍所述操作手柄的转动;
[0023]
所述球挡一端与所述斜块线接触,另一端与所述解锁维持弹簧的一端相连;所述解锁维持弹簧另一端伸入固定在所述曲柄上端面的球筒内部,与所述球筒内底面相连;所述球挡能够在所述球筒内滑动。
[0024]
作为本发明的一种优选方式:所述曲柄滑块机构中的曲柄通过锁舌机构和所述操作手柄相连;
[0025]
所述锁舌机构包括:锁舌、螺盖和锁舌弹簧;所述锁舌安装在所述曲柄侧面的安装孔内,所述锁舌与该安装孔滑动配合;所述锁舌弹簧一端与所述锁舌相连,另一端和与该安装孔螺纹连接的螺盖相连,通过调节螺盖的螺纹拧入深度改变所述锁舌弹簧的初始压缩量;
[0026]
所述锁舌顶部设有斜面,形成斜棱柱结构,与所述操作手柄端部的三棱柱结构相配合,实现所述操作手柄与所述锁舌的锁定。
[0027]
作为本发明的一种优选方式:所述安装座的两相对端面中,一端面为法兰面,另一端面为方形对接端面;其中法兰面用于和航天器外部接口固连;对接端面外凸有对接柱,所述对接柱用于和主动端上的对接孔相配合;所述对接柱从法兰面指向对接端面的方向依次为大柱段、锥形导向过渡段和小柱段;对应的所述主动端上的对接孔从外向内依次为:大柱段孔、锥形的导向过渡孔和小柱段孔;所述锁定孔设置在所述小柱段上;所述滑动托柱组件位于所述小柱段孔内。
[0028]
作为本发明的一种优选方式:所述被动端安装座的侧壁上设置有指针;所述指针用于指示所述被动端和所述主动端对接过程中,被动端的插入深度。
[0029]
有益效果:
[0030]
(1)该手持式对接机构可通过航天员太空出舱活动,实现空间有效载荷与航天器的捕获、对接、锁紧、解锁、解锁维持与分离功能;采用无源的纯机械设计,轻量化、小型化,具有结构简单、操作简便、可靠性高、安全性高、可重复使用、人机工效性良好的特点。
[0031]
(2)该手持式对接机构采用锥杆式的对接导向结构,锥杆与锥孔由精配合大柱段、导向过渡锥形段、粗配合小柱段构成,在主被动端捕获对接过程中,具备大容差适应能力,可同时适应航天员大操作误差与对接到位高精度装配要求。
[0032]
(3)该手持式对接机构既可通过曲柄滑块机构,实现对接与锁紧的功能解耦;还可通过解锁维持机构自保持解锁状态,实现解锁与分离的功能解耦,适用于航天员太空出舱活动中换手操作。在完成主、被动端捕获对接后,通过弹簧力可实现自动落锁,防止主、被动端逃逸分离,连接可靠。
[0033]
(4)该手持式对接机构通过曲柄连杆机构放大航天员有限操作力并实现自锁,通过调节碟簧压缩量的方式控制尺寸链,实现预紧力的精密调节,预紧载荷大,可实现高刚度、大承载、在轨长期锁定。
[0034]
(5)该手持式对接机构通过航天员作用力于操作手柄,驱动曲柄滑块机构、碟簧预紧组件与锁定销组件正向或反向运动,可重复锁紧与解锁,灵活性强,可多次使用操作。
附图说明
[0035]
图1-图2为本发明手持式对接机构被动端的结构示意图;
[0036]
图3-图5为本发明手持式对接机构主动端的结构示意图;
[0037]
图6-图8为本发明手持式对接机构主、被动端捕获过程示意图;
[0038]
图9为本发明手持式对接机构主、被动端对接过程完成(小预紧力)示意图;
[0039]
图10为本发明手持式对接机构主、被动端锁紧状态(大预紧力)示意图;
[0040]
图11为本发明手持式对接机构主、被动端解锁维持状态示意图。
[0041]
其中:100-被动端、101-安装座、102-指针、103-对接柱、200-主动端、201-对接座、202-滑动托柱组件、2021-滑动托柱、2022-滑动托柱弹簧、2023-托柱导向杆、203-握持筒壳体组件、2031-握持筒壳、204-锁定销组件、2041-锁定销、2042-锁定销弹簧、205-连接轴、206-碟簧预紧组件、2061-碟簧组、2062-碟簧筒、207-曲柄滑块机构、2071-滑块、2072-连杆、2073-曲柄、208-解锁维持机构、2081-斜块、2082-球挡、2083-解锁维持弹簧、209-锁舌机构、2091-锁舌、2092-螺盖、2093-锁舌弹簧、210-操作手柄。
具体实施方式
[0042]
下面结合附图并举实施例,对本发明进行详细描述。
[0043]
本实施例提供一种适用于太空出舱活动的手持式对接机构,使用时,由航天员单手或双手手持操作,实现空间有效载荷与航天器的捕获、对接、锁紧、解锁、解锁维持与分离;对接时具有大容差导向能力和防逃逸的自动落锁功能;锁紧时通过增力机构实现大预紧力、具备大承载能力和良好连接刚度;解锁后具备自保持能力,可重复锁紧解锁、重复使用。
[0044]
该手持式对接机构包括被动端100和主动端200;其中被动端100与航天器外部接口固定连接,如图1所示,被动端100可与航天器结构外板倾斜面固定连接;主动端200与空间有效载荷连接,空间有效载荷包括天线、相机、电池阵等。
[0045]
如图1和图2所示,被动端100包括:安装座101和指针102。安装座101的两相对端面中,一端面为法兰面,另一端面为方形对接端面;其中法兰面用于和航天器外部接口固连;对接端面外凸有对接柱103,对接柱103用于和主动端200上的锥形孔相配合;对接柱103从法兰面指向对接端面的方向,依次为精配合大柱段、锥形导向过渡段和粗配合小柱段,其中粗配合小柱段的外圆周上设有方孔作为锁定孔a(具体为方形通孔),用于防逃逸约束与施加预紧力锁紧;方孔的内壁面为斜面,倾角小于锁定销2041与被动端100对接柱103方孔的摩擦自锁角,与主动端200锁定销2041上端的斜面对应。安装座101中部为方形底座,内部有减重孔。
[0046]
指针102装配于安装座101侧壁,与主动端对接座201的标识配合使用,指示捕获与对接过程中被动端100的插入深度。
[0047]
如图3所示,主动端200包括:对接座201、滑动托柱组件202、握持筒壳体组件203、锁定销组件204、连接轴205、碟簧预紧组件206、曲柄滑块机构207、解锁维持机构208、锁舌机构209和操作手柄210。
[0048]
其中对接座201的两相对端中,一端为内锥外方结构,外部为方形结构,内部设置有用于和被动端100的对接柱103配合的锥形孔,其中锥形孔从外向内依次为:精配合的大柱段孔、锥形的导向过渡孔和粗配合的小柱段孔;大柱段孔与对接柱103的大柱段配合用于导向与精配合对接,小柱段孔与对接柱103的小柱段配合用于捕获与粗配合对接,锥形导向过渡孔与对接柱103的锥形导向过渡段配合用于引导对接。大柱段孔与小柱段孔可为圆形
或腰形,具备大容差导向适应能力。对接座201底部留有方孔作为锁定孔b,当对接柱103完全插入对接座201上的锥形孔且被动端100与主动端200完成对接后,锁定孔a和锁定孔b同轴;同时对接座201上设有减重槽与减重孔。对接座201的另一端为法兰面,对接座201通过该法兰面与空间有效载荷固接。对接座201内部有圆形通孔,用于提供托柱导向杆2023滑动通道。
[0049]
滑动托柱组件202用于约束锁定销组件204的初始位置。滑动托柱组件202包括:滑动托柱2021、滑动托柱弹簧2022和托柱导向杆2023;滑动托柱组件202安装在对接座201锥形孔的小柱段孔内;其中滑动托柱2021同轴套装在对接座小柱段孔内,与对接座小柱段孔间隙配合,能够在对接座小柱段孔内滑动;托柱导向杆2023一端伸入滑动托柱2021内部圆柱孔中与滑动托柱2021内底面螺纹配合连接,确保托柱导向杆2023安装后不凸出滑动托柱2021端面;另一端设置有外翻台阶,与对接座201法兰面的台阶孔配合,用于限制托柱导向杆2023的行程。滑动托柱弹簧2022套装在托柱导向杆2023外部,一端伸入滑动托柱2021内部与滑动托柱2021内底面连接,另一端与对接座小柱段孔的内底面连接,由此滑动托柱2021在对接座小柱段孔内滑动时能够带动滑动托柱弹簧2022压缩;滑动托柱弹簧2022的压缩通过托柱导向杆2023内导向。对接柱103与对接座201未对接时,滑动托柱2021堵住锁定孔b,从而约束锁定销组件204的初始位置。
[0050]
如图3所示,握持筒壳体组件203包括:内部具有贯通孔的握持筒壳2031和握持筒盖;握持筒壳2031上端为方形结构,方形结构通过安装法兰面与对接座201底面方孔所在平面紧密贴合;方形结构内部设有方形通孔,与锁定销组件204中的方形锁定销滑动配合,与曲柄滑块机构207的滑块2071滑动配合。握持筒壳2031中部内表面开槽,用于安装弹簧隔板;握持筒壳2031下端表面设置有圆形外台阶孔,用于安装曲柄转轴;握持筒壳2031下端为单侧外圆弧结构;侧壁设有方孔并预留曲柄转动包络;握持筒壳2031底端装配蒙皮,可防止多余物。握持筒盖设置在握持筒壳2031外部,握持筒盖与握持筒壳2031在顶部与中部分别通过螺钉固定连接。
[0051]
锁定销组件204位于握持筒壳2031内部,包括:锁定销2041、滚柱、锁定销弹簧2042和弹簧隔板。其中锁定销2041顶部通过滚柱螺钉安装有滚柱,滚柱与滚柱螺钉间隙配合,滚柱可自由转动;通过设置滚柱将锁定销2041与滑动托柱2021、对接柱103间的滑动摩擦变为滚动摩擦,能够减少锁定销2041与滑动托柱2021、对接柱103之间的摩擦。同时锁定销2041上端设有斜面,斜面倾角与安装座101对接柱103方孔内斜面倾角相同,小于锁定销2041与被动端100对接柱103方孔的摩擦自锁角;锁定销2041中部为方形结构,防止发生转动,与握持筒壳2031方形通孔滑动配合;锁定销底部设置有挡板,用于约束锁定销弹簧2042的变形量,挡板下端面具有外凸圆柱轴。弹簧隔板为u型结构,u型外侧面嵌入握持筒壳2031中部内表面的槽内,可独立装配;锁定销弹簧2042一端与锁定销2041底部挡板连接,另一端与弹簧隔板内底面连接。依据实际使用需要可以在握持筒壳2031内部设置一个以上锁定销弹簧2042,一个以上锁定销弹簧2042在握持筒壳2031内部沿周向均匀间隔分布。锁定销2041在握持筒壳体组件203内自由滑动(滑动时带动锁定销弹簧2042伸缩),锁定销2041上端滚柱可减少与滑动托柱2021、安装座101的摩擦,通过锁定销弹簧2042实现主动端200和被动端100对接到位后的自动落锁(对接到位后,锁定销2041在锁定销弹簧2042的作用下伸出至对接柱103粗配合小柱段外圆周上的方孔内,实现斜面贴合,从而将主动端200和被动端100位
置锁定),可防止空间有效载荷逃逸,保持连接状态,适用于航天员太空出舱活动时换手操作等。锁定销2041伸入对接柱103方孔内后,其上端斜面与方孔内斜面配合(令为配合面),经过碟簧预紧组件206与曲柄滑块机构207为配合面提供大预紧力。锁定销2041伸入对接柱103方孔内、锁定销2041在握持筒壳2031内运动行程最上端的位置为锁定状态位置;锁定销2041在握持筒壳2031内运动行程最下端的位置为解锁维持状态位置。
[0052]
碟簧预紧组件206包括:碟簧组2061、碟簧筒2062与碟簧调整垫片。碟簧预紧组件206位于握持筒壳2031内部,锁定销2041与滑块2071之间。其中,碟簧组2061由一个以上串联在一起的碟簧形成;碟簧组2061的下端套装在碟簧筒2062内部,并与碟簧筒2062内碟簧调整垫片相连;上端套装在锁定销2041底部挡板的外凸圆柱轴外,并与锁定销2041底部挡板相连;碟簧筒2062上端自由,碟簧筒2062下端与连接轴205通过螺纹固连。碟簧调整垫片套装在碟簧筒2062内,位于碟簧组2061下端与碟簧筒2062内底面之间,通过调节碟簧调整垫片的厚度可调整碟簧装配后的初始压缩量,提供部分锁紧力。碟簧预紧组件206通过选用不同厚度的碟簧调整垫片,控制传力路径的尺寸链,可调节碟簧组2061的初始压缩量,通过与曲柄滑块机构207配合工作,可精密调节锁紧的预紧力,施加大预紧载荷,实现高刚度、大承载、在轨长期锁定。
[0053]
连接轴205串联在碟簧预紧组件206与曲柄滑块机构207的传力路径中,连接轴205的外圆周面设置有平面豁口,可用于施加力矩;连接轴205一端与曲柄滑块机构207的滑块2071螺纹固连,另一端与碟簧预紧组件206的碟簧筒2062螺纹固连。
[0054]
曲柄滑块机构207包括:滑块2071、连杆2072和曲柄2073;其中滑块2071与握持筒壳2031构成滑动副,连杆2072通过转动副联接曲柄2073和滑块2071。具体的:滑块2071位于握持筒壳2031内部,与握持筒壳2031内壁滑动配合;滑块2071顶部与连接轴205螺纹固连,滑块2071底部为连接耳片,与连杆2072通过连杆转轴间隙配合。连杆2072两端为连杆转轴,分别与滑块2071和曲柄2073相连。握持筒壳2031下端的曲柄2073所在侧为外圆弧结构,使其内部具有曲柄2073的转动空间。曲柄2073一端与连杆转轴间隙配合转动,并设有止推面,用于锁紧后限制转动角度;另一端为方形结构,与操作手柄外形对齐,方形结构内部与侧面均设有方形孔,分别与操作手柄210、锁舌机构209装配安装。曲柄滑块机构207在握持筒壳体组件203内,曲柄2073通过曲柄转轴与握持筒壳2031形成转动副,曲柄2073绕曲柄转轴转动,滑块2071自由滑动,滑块2071向上滑动时,压缩碟簧组2061;航天员操作力产生的锁紧力与碟簧预紧组件206产生的初始压缩力叠加后,通过锁定销组件204作用于对接柱103的方孔斜面,提供大预紧载荷。
[0055]
解锁维持机构208设置在曲柄2073与操作手柄210相连一侧的上端面,操作手柄210逆时针转动时,该手持式对接机构在解锁维持机构208的作用下进入解锁维持状态;操作手柄210顺时针转动时,该手持式对接机构脱离解锁维持状态。解锁维持机构208包括:斜块2081、球挡2082、球筒、堵头与解锁维持弹簧2083;其中斜块2081固定于握持筒壳2031下端侧壁,并通过定位销定位、螺纹紧固;斜块2081上端设有外凸三棱柱,用于产生对球挡2082的阻力;球挡2082一端为半圆柱,与斜块2081实现线接触;另一端外形为圆柱,内部设有圆柱孔,作为解锁维持弹簧2083的外导向;中间为方形结构。球筒固定在曲柄2073上端面,球筒内部设有圆柱孔,球挡2082能够在球筒内部滑动;球筒一端留有方形孔,与球挡2082中间方形结构配合,以防止球挡2082转动;另一端设有螺纹,用于和堵头螺纹连接;解
锁维持弹簧2083一端与球挡2082圆柱孔内底面连接,另一端与堵头连接;初始时,解锁维持弹簧2083处于压缩状态,调整堵头的拧入深度可改变解锁维持弹簧2083的初始压缩量,从而根据不同工况提供不同阻力。
[0056]
如图7和图8所示,主动端200和被动端100对接过程中,操作手柄201处于水平状态,球挡2082位于斜块2081的外凸三棱柱的斜面右下侧位置,斜块2081对球挡2082产生阻力,该阻力阻碍了操作手柄210的逆时针转动,可避免误操作,通过改变内部解锁维持弹簧2083的弹簧力,借助操作手柄210转动角度的变化,提供不同方向、大小的阻力,由航天员施加于操作手柄210的操作力克服该阻力实现操作手柄210逆时针转动;
[0057]
如图11所示,需要解锁维持时,球挡2082位于斜块2081的外凸三棱柱的斜面上方位置,斜块2081对球挡2082产生阻力,该阻力阻碍了操作手柄210在锁定销弹簧2042作用下的顺时针转动,通过改变内部解锁维持弹簧2083的弹簧力,借助操作手柄210转动角度的变化,提供不同方向、大小的阻力,由航天员施加于操作手柄210的操作力克服该阻力实现操作手柄210顺时针转动。
[0058]
逆时针转动操作手柄210进入解锁维持状态时(如从图10到图11的过程),滑块2071向下滑动,带动锁定销2041下移,克服锁定销组件204中锁定销弹簧2042的弹簧阻力,以及斜块2081与球挡2082表面摩擦阻力;顺时针转动操作手柄210脱离解锁维持状态时(如图11到图8的过程),滑块2071向上滑动,带动锁定销2041上移,克服斜块2081与球挡2082表面摩擦阻力,从而将解锁过程与分离过程两者解耦,适合于太空出舱活动中航天员换手操作等不同时序任务要求。
[0059]
如图4所示,锁舌机构209包括:锁舌2091、螺盖2092和锁舌弹簧2093;其中锁舌2091为方形结构,在曲柄2073的端部侧面加工有用于安装锁舌2091的安装孔,锁舌2091能够在该安装孔中滑动;锁舌2091一端留有圆柱孔,装配外导向的锁舌弹簧2093;锁舌2091另一端设有斜面,形成斜棱柱结构,与操作手柄210端部的三棱柱结构相配合,实现操作手柄210的可靠插入锁定;同时锁舌2091斜面旁设有台阶,实现锁舌2091运动的限位;锁舌弹簧2093的一端伸入锁舌2091的圆柱孔内,另一端压紧螺盖2092;螺盖2092与锁舌安装孔螺纹连接,调节螺盖2092的螺纹拧入深度可改变锁舌弹簧2093的初始压缩量,提供不同的锁舌弹力。锁舌机构209在曲柄侧壁方孔中滑动,由锁舌弹簧2093提供回复力。
[0060]
操作手柄210整体为方形杆件,用于航天员施加操作力。操作手柄210一端留有减重孔,另一端为钩型三棱柱结构,用于和锁舌机构209中锁舌2091另一端的斜棱柱结构配合。航天员太空出舱活动前,将操作手柄210通过锁舌机构209与曲柄2073相连,实现操作手柄210可靠插入锁定,由此可通过操作手柄210带动曲柄2073转动。
[0061]
如图5所示,握持筒壳体组件203设置在对接座201底部,通过法兰面与对接座201底部方孔所在平面固接,用于支撑锁定销组件204、碟簧预紧组件206、曲柄滑块机构208的运动与传力。
[0062]
该手持式对接机构的装配方法如下:
[0063]
被动端装配方法如下:首先将指针102装配于安装座101侧壁凹槽中,安装座法兰装配于航天器外部接口。
[0064]
主动端装配方法如下:先装配对接座201与滑动托柱组件202,同步装配锁舌机构209与曲柄2073、操作手柄210与曲柄2073、解锁维持机构208与曲柄2073;进一步装配曲柄
滑块机构207,再装配锁定销组件204与连接轴205、碟簧预紧组件206,完成后可将一体的锁定销组件204、连接轴205、碟簧预紧组件206、曲柄滑块机构207装配至握持筒壳2031内,并安装曲柄转轴,最终装配握持筒壳体组件203,完成主动端的预装配。根据空间有效载荷与航天器手持式对接机构不同预紧力的需求,选用不同厚度的碟簧调整垫片。
[0065]
该手持式对接机构设计有符合人机工效学的状态指示标识,包括对接柱103插入深度指示、操作手柄210安装状态指示、操作手柄210转动状态指示;具体为:
[0066]
对接柱103插入深度指示标识刻识在对接座201侧壁,分为多条竖直刻线与多个阿拉伯数字,刻线与数字竖直对齐,可用于发布指挥口令与多人同步操作。多条刻线与数字对应于被动端100指针顶端不同位置,指示被动端100对接柱103插入对接座201的深度,自对接端面至安装法兰面排序,数字“1”表示完成主被动端捕获,对接过程开始,被动端100对接柱103进入对接座201粗配合段;数字“2”表示对接过程进行中,对接柱103进入对接座201精配合段;数字“3”表示对接过程结束,实现对接面贴合、锁定销2041自动落锁,主被动端具备防逃逸能力。
[0067]
操作手柄210安装状态指示标识分为两条长直刻线,分别刻识在曲柄2073末端与操作手柄210末端,指示航天员在轨装配操作手柄210的方向,并可用于检查操作手柄210安装状态。
[0068]
操作手柄210转动状态指示标识分为箭头、位置线与汉字。箭头刻识在曲柄2073侧壁,贴近曲柄转轴,可用于代表曲柄2073转动方位。位置线刻识在握持筒壳2031底端侧壁与斜块2081侧壁,分为三条位置线,自曲柄转轴向两侧延伸,三者彼此间夹角满足人机工效学要求和操作要求。汉字刻识于握持筒壳体组件侧壁,与三条位置线相对应,可表示为“初”“锁”“解”,满足人机工效学要求,清晰可见,可用于指示操作手柄210转动状态与手持式对接机构当前状态。
[0069]
以下对该手持式对接机构的工作过程进行详细描述。
[0070]
该手持式对接机构主、被动端捕获对接过程:
[0071]
(1)开始状态:如图6和图7所示,主动端200与空间有效载荷固连,航天员开展太空出舱活动,接近主动端200的握持筒壳体组件203,单手(另一只手可用于固定)或双手握住握持筒壳体组件203外壁,观察并粗调主动端200位姿至进入被动端100捕获容差范围。随后,航天员对握持筒壳体组件203外壁施加操作力,推动主动端200及空间有效载荷向被动端100移动,直至被动端100的指针102的插入深度标识与对接座201位置线“1”对齐,此时滑动托柱组件202产生对接阻力,表明此时开始捕获对接,操作手柄210的转动状态指示标识指向“初”位置线;
[0072]
(2)中间过程:具体参考图7和图8所示,被动端100指针102的插入深度标识与对接座201位置线“2”对齐,航天员手持握持筒壳组件203,沿对接方向持续施加操作力,逐步贴近主、被动端对接面,根据被动端100指针在对接座201上的插入深度指示标识,判断当前对接状态,该过程中操作手柄210的转动状态指示标识始终指向“初”位置线;
[0073]
(3)完成状态:具体参考图9所示,被动端100与主动端200对接面贴合后,被动端100指针与对接座201插入深度指示标识位置线“3”对齐,操作手柄210在锁定销组件204的弹簧力作用下绕曲柄转轴顺时针旋转,实现自动落锁,操作手柄210转动状态指示标识指向“初”位置线与“锁”位置线之间,此时被动端100与主动端200实现可靠连接,具备防逃逸能
力。
[0074]
主、被动端锁紧过程:
[0075]
具体参考图10所示,航天员手握操作手柄210方形结构中部,对操作手柄210施加操作力,绕曲柄转轴顺时针旋转操作手柄210,此时碟簧预紧组件206对滑块2071的移动产生阻力,滑块2071向上滑动压缩碟簧预紧组件206,直至曲柄滑块机构207与握持筒壳2031内壁发生旋转限位,操作手柄210转动状态指示标识指向“锁”位置线,表明完成预紧力加载完成,实现高刚度锁紧、大承载连接,锁紧过程与对接过程两者解耦。曲柄滑块机构207通过死点、具备自锁能力,能够在轨长期锁定,航天员可松开操作手,开展其他舱外活动。
[0076]
主、被动端解锁分离过程:
[0077]
(1)解锁过程:具体参考图9所示,航天员手握操作手柄210方形结构中部,施加操作力,绕曲柄转轴逆时针旋转操作手柄210,克服碟簧预紧组件206的阻力,转动操作手柄210过曲柄滑块机构207的死点后,卸载部分预紧力,操作手柄210转动状态指示标识由“锁”位置线指向“初”与“锁”位置线之间的区域,表明回到了对接完成后、自动落锁的小预紧力连接状态;
[0078]
进一步逆时针转动操作手柄210(此时锁定销组件204产生弹簧阻力),直至操作手柄210转动状态指示标识指向“初”位置线,表明实现了主、被动端的初步解锁。但此时若撤除航天员操作力后,在锁定销组件204弹簧力作用下,主、被动端会再次自动落锁连接;
[0079]
(2)解锁维持过程:具体参考图11所示。进一步逆时针转动操作手柄210,此时解锁维持机构208产生阻力,直至曲柄2073与斜块2081或握持筒壳2031发生机械限位,操作手柄210转动状态指示标识指向“解”状态,表明实现主、被动端进入解锁维持状态,手持式对接机构可自保持解锁状态;航天员可以松开操作手,移动至握持筒壳体组件203外壁并握紧,推动主动端200与空间有效载荷分离,或开展其他舱外活动。
[0080]
(3)分离过程:在解锁维持状态下,航天员握紧握持筒壳体组件203外壁,推动主动端200与被动端100分离,滑动托柱组件202在弹簧力作用下复位,分离过程与解锁过程两者解耦。
[0081]
主、被动端重复对接过程:
[0082]
(1)回复初始:航天员进行太空出舱活动,移动至主动端200附近,手握操作手柄210方形结构中部,施加操作力,绕曲柄转轴顺时针旋转操作手柄210,克服解锁维持机构208弹簧力与摩擦阻力,转动一定角度,直至操作手柄210转动状态指示标识由“解”位置线指向“初”位置线,操作手柄210回到初始对接位置;
[0083]
(2)重复对接:重复上述的主、被动端捕获对接、锁紧过程,即可实现主、被动端重复对接。
[0084]
综上,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips