
 商标分类
商标分类  商标转让
商标转让 
一种线夹X光检测用无人机的制作方法
 2021-02-13 05:02:38|
2021-02-13 05:02:38| 345|
345| 起点商标网
起点商标网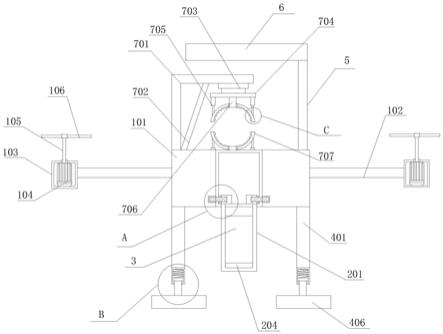
一种线夹x光检测用无人机
技术领域
[0001]
本发明涉及线夹检测设备技术领域,具体为一种线夹x光检测用无人机。
背景技术:
[0002]
由于架空输电线路的覆盖区域广、穿越区域地形复杂并且自然环境恶劣,线路基础、杆塔、导地线、金具等受到外界侵害而出现缺陷和隐患,导致线路故障跳闸威胁电网的安全和稳定运行。利用x射线无损探伤检测技术可以发现线夹内部缺陷和隐患。《国家电网公司关于印发架空输电线路“三跨”运维管理补充规定》(国家电网运检〔2016〕777号),2017年南方电网生技部发布了《关于印发《南方电网输配电线路交叉跨越专项反事故措施》的通知》,要求对耐张线夹进行x射线无损检测。然而,目前在进行具体检测操作时,通常需要停电作业,降低了供电可靠性。目前线夹检测主要是采用停电人工登塔检测,固定成像设备,耗费了大量的时间及人力物力;无人机检测用绳子和x光检测设备连接,在风的影响下,晃动很大,影响挂线,甚至导致坠机。
技术实现要素:
[0003]
本发明的目的在于提供了一种线夹x光检测用无人机,通过在无人机上搭载便携式x光无损检测设备,进行遥控x光成像,通过图像处理和分析,实现架空地线压接管缺陷隐患带电检测识别,改变传统模式下需要停电进行人工登塔检测做法。
[0004]
为实现上述目的,本发明提供如下技术方案:一种线夹x光检测用无人机,包括无人机,所述无人机通过安装机构与射线器固定连接,所述无人机的底部固定安装有起落架,所述无人机顶部的右侧固定安装有支架,所述支架的顶部与成像板固定连接,所述无人机顶部的右侧设置有挂接机构;
[0005]
所述无人机包括机身,动力臂,安装座,动力电机,旋转轴和螺旋桨,,所述动力臂的一端与机身固定连接,所述动力臂远离机身的一端与安装座固定连接,所述动力电机固定安装在安装座的颞部,所述动力电机的输出轴贯穿安装座的顶部并通过轴承与安装座转动连接,所述动力电机的输出端通过联轴器与旋转轴固定连接,所述旋转轴的顶端与螺旋桨固定连接;
[0006]
所述安装机构包括框架,连接块,螺栓和安装板,所述框架的顶部与连接块固定连接,所述连接块的一端套接在螺栓的表面并与螺栓转动连接,所述螺栓远离连接块的一端通过螺纹与机身固定连接,所述安装板的底部与框架固定连接;
[0007]
所述挂接机构包括挂接支架,加强杆,电动伸缩杆一,连接板二,电动伸缩杆二,连接块二,夹板和齿牙,所述挂接支架底部表面的左侧与机身固定连接,所述挂接支架底部表面中部与加强杆固定连接,所述加强杆远离挂接支架一端与机身固定连接,所述挂接支架底部表面的右侧与电动伸缩杆一固定连接,所述电动伸缩杆一的底部与连接板二固定连接,所述连接板二底部表面的中部与连接块二固定连接,所述连接板二底部表面的左右两侧与电动伸缩杆二固定连接,所述连接块二底部的左右两侧通过铰链与夹板活动连接,所
述电动伸缩杆二远离连接板二的一端与夹板固定连接,所述夹板的底部表面设置有齿牙。
[0008]
优选的,所述射线器固定安装在安装板的顶部。
[0009]
优选的,所述起落架包括支撑杆,连接板,弹簧,连杆和支撑脚,所述支撑杆的顶部与机身固定连接,所述支撑杆的底部表面设置有弹簧槽,所述弹簧的顶部与弹簧槽的顶部槽壁固定连接,所述弹簧的底部与连接板固定连接,所述连接板的底部与连杆固定连接,所述连杆的底部与支撑脚固定连接。
[0010]
优选的,所述机身为环形设置,且机身为正六边形设置,机身采用碳纤维制作。
[0011]
优选的,所述动力臂,安装座,动力电机,旋转轴和螺旋桨的数量均为六个,且均以机身的中点为中心呈环形整列分布。
[0012]
优选的,所述挂接支架为反向“7”形设置,所述加强杆和电动伸缩杆一均设置在挂接支架的右侧。
[0013]
优选的,所述加强杆处于挂接支架和电动伸缩杆一的中部,且加强杆为倾斜设置,倾斜角度为63
°
。
[0014]
优选的,所述挂接机构为两组设置,两组分别设置在机身顶部的前端与后端,一组所述挂接机构中连接块二,电动伸缩杆二和夹板分为两组,两组上下对称设置,一组的顶部与连接板二的底部固定连接,一组的底部与机身固定连接。
[0015]
本发明提供了一种线夹x光检测用无人机。具备以下有益效果:
[0016]
(1)、本发明通过安装机构将无人机与射线器连连接,使得射线器便于安装与检修;在机身底部的前后均设置框架,两个框架的底部通过安装板连接,将射线器固定安装在安装板的顶部,同时在框架的顶部通连接块与螺栓连接,通过将连接块套接在螺栓的表面,并且螺栓与连接块转动连接,在安装时通过转动螺栓与机身螺纹连接,操作简单方便。
[0017]
(2)、本发明通过设置环形的机身,射线器往上发射,射线贯穿无人机机身,不干扰无人机工作。成像板通过绝缘的支架和无人机机身顶部固定连接,刚度好。挂接机构在挂接时通过无人机机身携带的摄像头控制无人机移动到线夹附近,电动伸缩杆一向下伸长,同时左右两侧的电动伸缩杆二使得两侧的夹板向中部靠拢,直至夹住电缆,完成挂接操作,在夹板的内侧设置了齿牙增大夹板与电缆的摩擦力,挂接机构的设置保证了无人机挂接的便捷与稳定;挂线后,为了减少震动,节省无人机电池用电,无人机停桨。拍摄完毕,挂接机构反向操作,再启桨控制无人机脱线,落地。
[0018]
(3)本发明通过在无人机机身的底部设置起落架,不需要起降平台,可以在任意平地或者草地起降。相比较目前无人机因为下面挂载射线检测装置,去掉了起落架或者起落架下吊有检测装置,起降非常麻烦,需要起降平台。同时在起落架中通过支撑杆、连接板、弹簧、连杆、支撑脚的配合,在无人机落地时能有效降低震动,避免对射线器造成影响,保证射线器的使用寿命。
附图说明
[0019]
图1为本发明正视剖面结构示意图;
[0020]
图2为图1中a的放大图;
[0021]
图3为图1中b的放大图;
[0022]
图4为图1中c的放大图;
[0023]
图5为本发明俯视结构示意图。
[0024]
图中:1无人机、101机身、102动力臂、103安装座、104动力电机、105旋转轴、106螺旋桨、2安装机构、201框架、202连接块、203螺栓、204安装板、3射线器、4起落架、401支撑杆、402弹簧槽、403连接板、404弹簧、405连杆、406支撑脚、5支架、6成像板、7挂接机构、701挂接支架、702加强杆、703电动伸缩杆一、704连接板二、705电动伸缩杆杆二、706连接块二、707夹板、708齿牙。
具体实施方式
[0025]
如图1-5所示,本发明提供一种技术方案:一种线夹x光检测用无人机,包括无人机1,无人机1通过安装机构2与射线器3固定连接,射线器3固定安装在安装板204的顶部,无人机1的底部固定安装有起落架4,起落架4包括支撑杆401,连接板403,弹簧404,连杆405和支撑脚406,支撑杆401的顶部与机身101固定连接,支撑杆401的底部表面设置有弹簧槽402,弹簧404的顶部与弹簧槽402的顶部槽壁固定连接,弹簧404的底部与连接板403固定连接,连接板403的底部与连杆405固定连接,连杆405的底部与支撑脚406固定连接,通过在无人机1机身101的底部设置起落架4,不需要起降平台,可以在任意平地或者草地起降。相比较目前无人机因为下面挂载射线检测装置,去掉了起落架或者起落架下吊有检测装置,起降非常麻烦,需要起降平台。同时在起落架4中通过支撑杆401、连接板403、弹簧404、连杆405、支撑脚406的配合,在无人机落地时能有效降低震动,避免对射线器3造成影响,保证射线器3的使用寿命,无人机1顶部的右侧固定安装有支架5,支架5的顶部与成像板6固定连接,无人机1顶部的右侧设置有挂接机构7;
[0026]
无人机1包括机身101,动力臂102,安装座103,动力电机104,旋转轴105和螺旋桨106,所述机身101为环形设置,且机身101为正六边形设置,机身101采用碳纤维制作,动力臂102的一端与机身101固定连接,动力臂102远离机身101的一端与安装座103固定连接,动力电机104固定安装在安装座103的颞部,动力电机104的输出轴贯穿安装座103的顶部并通过轴承与安装座103转动连接,动力电机104的输出端通过联轴器与旋转轴105固定连接,旋转轴105的顶端与螺旋桨106固定连接,动力臂102,安装座103,动力电机104,旋转轴105和螺旋桨106的数量均为六个,且均以机身101的中点为中心呈环形整列分布;
[0027]
安装机构2包括框架201,连接块202,螺栓203和安装板204,框架201的顶部与连接块202固定连接,连接块202的一端套接在螺栓203的表面并与螺栓203转动连接,螺栓远离连接块202的一端通过螺纹与机身101固定连接,安装板204的底部与框架201固定连接,通过安装机构2将无人机1与射线器3连接,使得射线器3便于安装与检修;在机身101底部的前后均设置框架201,两个框架201的底部通过安装板204连接,将射线器201固定安装在安装板204的顶部,同时在框架201的顶部通连接块202与螺栓203连接,通过将连接块202套接在螺栓203的表面,并且螺栓203与连接块202转动连接,在安装时通过转动螺栓203与机身101螺纹连接,操作简单方便;
[0028]
挂接机构7包括挂接支架701,加强杆702,电动伸缩杆一703,连接板二704,电动伸缩杆二705,连接块二706,夹板707和齿牙708,挂接支架701底部表面的左侧与机身101固定连接,挂接支架701为反向“7”形设置,加强杆702和电动伸缩杆一703均设置在挂接支架701的右侧,挂接支架701底部表面中部与加强杆702固定连接,加强杆702远离挂接支架701一
端与机身101固定连接,挂接支架701底部表面的右侧与电动伸缩杆一703固定连接,加强杆702处于挂接支架701和电动伸缩杆一703的中部,且加强杆702为倾斜设置,倾斜角度为63
°
,电动伸缩杆一703的底部与连接板二704固定连接,连接板二704底部表面的中部与连接块二706固定连接,连接板二704底部表面的左右两侧与电动伸缩杆二705固定连接,连接块二706底部的左右两侧通过铰链与夹板707活动连接,电动伸缩杆二705远离连接板二704的一端与夹板707固定连接,夹板707的底部表面设置有齿牙708,挂接机构7为两组设置,两组分别设置在机身101顶部的前端与后端,一组挂接机构7中连接块二706,电动伸缩杆二705和夹板707分为两组,两组上下对称设置,一组的顶部与连接板二704的底部固定连接,一组的底部与机身101固定连接,通过在设置环形的无人机机身101,射线器3往上发射,射线贯穿机身101,不干扰无人机1工作。成像板6通过绝缘的支架5和无人机1机身5顶部固定连接,刚度好。挂接机构7在挂接时通过无人机1机身101携带的摄像头控制无人机1移动到线夹附近,电动伸缩杆一703向下伸长,同时左右两侧的电动伸缩杆二705使得两侧的夹板707向中部靠拢,直至夹住电缆,完成挂接操作,在夹板707的内侧设置了齿牙708增大夹板与电缆的摩擦力,挂接机构7的设置保证了无人机1挂接的便捷与稳定;挂线后,为了减少震动,节省无人机电池用电,无人机停桨。拍摄完毕,挂接机构反向操作,再启桨控制无人机脱线,落地。
[0029]
在使用时,启动动力电机104.带动旋转轴105转动,螺旋桨106随之转动,无人机1起飞,控制无人机飞至线夹附近,通过机身101上携带的摄像头控观察情况并制挂接机构7工作,电动伸缩杆一703向下伸长,同时左右两侧的电动伸缩杆二705使得两侧的夹板707向中部靠拢,直至夹住电缆,完成挂接操作,在夹板707的内侧设置了齿牙708增大夹板与电缆的摩擦力,挂接机构7的设置保证了无人机1挂接的便捷与稳定;挂线后,为了减少震动,节省无人机电池用电,无人机停桨。射线器3工作,射线器3朝上产生射线,射线透过线夹后照射到成像板6上,成像板6把射线能量转换为数字信号,射线的衰减跟被穿过物质的吸收系数成指数关系;射线贯穿机身101,不干扰无人机1工作,拍摄完毕,挂接机构反向操作,再启桨控制无人机脱线,落地。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips