
 商标分类
商标分类  商标转让
商标转让 
一种尾座式垂直起降无人飞行器的控制系统的制作方法
 2021-02-13 04:02:03|
2021-02-13 04:02:03| 138|
138| 起点商标网
起点商标网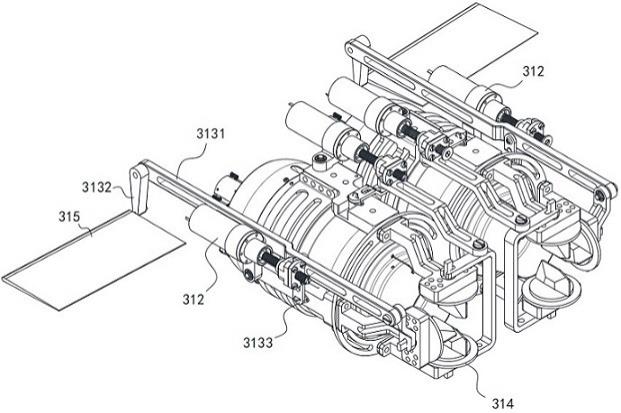
[0001]
本发明涉及无人飞行器的控制系统,尤其涉及一种尾座式垂直起降无人飞行器的控制系统。
背景技术:
[0002]
随着无人机发展,无人飞行器的控制系统及其结构尤为重要,当控制不当时,对无人飞行器的飞行特别是起降会造成十分严重的后果。
技术实现要素:
[0003]
本发明的目的是提供一种控制更为准确、灵活的一种尾座式垂直起降无人飞行器的控制系统。
[0004]
为了实现上述目的,本申请提供了一种尾座式垂直起降无人飞行器的控制系统,包括:主控系统,上述主控系统包含处理模块、反馈信号接收模块和控制平台通信模块,上述处理模块根据反馈信号接收模块接收到的反馈信号和控制平台通信模块接收的控制信号生成飞行控制指令;推进系统,上述推进系统包含涡喷推进单元,上述涡喷推进单元主要由发动机和相应的发动机控制电路所组成,上述发动机控制电路根据上述飞行控制指令中的相关指令控制对应发动机运行;舵系统,上述舵系统包含舵机,上述舵机主要由舵片和相应的舵片驱动电机、舵片驱动传动机构和舵片驱动控制电路所组成,上述舵片驱动控制电路根据上述无人飞行器飞行控制指令中的相关指令控制对应一个舵片驱动电机运行并通过舵片驱动传动机构使对应舵片转动;反馈系统,上述反馈系统包含用于获得生成上述飞行控制指令所需的飞行状况的传感器,上述传感器将获得的检测信号作为上述反馈信号发送至上述反馈信号接收模块并通过该反馈信号接收模块发送至处理模块进行处理;上述舵片包括设置于发动机喷管处的燃气舵片和布置于发动机侧方的空气舵片,上述空气舵片转轴设置于无人飞行器的机翼上,上述舵片驱动传动机构包含活动连接在发动机上的控制长杆,上述控制长杆两端分别连接上述燃气舵片和空气舵片,用于将上述燃气舵片和空气舵片联动;舵片驱动电机与控制长杆连接,用于驱动该控制长杆运动;上述传感器将获得的检测信号作为上述反馈信号发送至上述反馈信号接收模块,上述处理模块根据反馈信号接收模块控制舵片驱动电机以对控制长杆运动行程进行控制,以带动上述空气舵片和燃气舵片的联动。
[0005]
本发明的尾座式垂直起降无人飞行器的控制系统,包括空气动力控制和推力矢量控制,其中空气动力控制靠空气舵片在空气来流的作用下产生控制力和控制力矩,推力矢量控制则由燃气舵片在高温高压燃气作用下产生控制力和控制力矩,二者共用一套执行机
构,由舵片驱动电机带动舵片驱动传动机构和控制长杆驱动舵片偏转,产生复合控制力和控制力矩,处理模块根据反馈信号接收模块控制舵片驱动电机以对控制长杆运动行程进行控制,用于带动上述空气舵片和燃气舵片的联动。通过一个舵片驱动电机驱动控制长杆,控制长杆就可带动燃气舵片和空气舵片,使本舵系统就具有足够的操纵能力。
[0006]
进一步地是,上述控制长杆一端设置有摇臂,上述空气舵片通过与该空气舵片固定连接的转轴设置在无人飞行器的机翼上;上述摇臂的一端与控制长杆的一端铰接,该摇臂的另一端与空气舵片的转轴固定连接,用于摇臂绕转轴轴心转动时带动该转轴转动。
[0007]
进一步地是,上述发动机上设置有位于该发动机的壳体上的外架,上述传感器设置于该外架上,上述控制长杆的一部分与传感器传动连接,使传感器与燃气舵片、空气舵片通过该控制长杆联动。
[0008]
进一步地是,上述控制长杆中段上连接有一延伸杆,上述传感器上设置有可自转的联动件,上述延伸杆与上述传感器的联动件连接,使该延伸杆绕联动件转动时传感器接收到转动信号;上述延伸杆与摇臂平行设置,使延伸杆、控制长杆、摇臂和外架的一部分形成平行四连杆机构。这里的传感器优选的为角位移传感器,通过设置本摇臂和上述的延伸杆,以保障延伸杆和摇臂的运作。
[0009]
进一步地是,上述摇臂一端为宽端,另一端为窄端,该宽端与控制长杆连接,该窄端与空气舵片连接,以优化长杆与摇臂的受力。
[0010]
进一步地是,上述控制长杆和摇臂之间夹持有隔热件;或者,上述控制长杆通过隔热轴承连接摇臂的宽端。
[0011]
进一步地是,上述涡喷推进单元包含由两个发动机组成的发动机组,两个发动机上设置的控制长杆相对于两个发动机中间的对称轴对称设置。
[0012]
进一步地是,分别设置在两个控制长杆上的空气舵片对称设置且位于同一平面内。
[0013]
进一步地是,在上述同一平面内的两个空气舵片,在该平面内,该空气舵片的转轴轴向方向与发动机的轴向方向的夹角为85
°-
90
°
。
[0014]
或者,在上述同一平面内的两个空气舵片,在该平面内,该空气舵片的转轴的垂线与发动机的轴向方向的夹角为0-5
°
或2-3
°
。
[0015]
进一步地是,上述控制长杆为沿一方向延伸的直杆,设置为直杆不仅使传动简洁,也可以节省占用空间。
[0016]
下面结合附图和具体实施方式对本发明做进一步的说明。本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显。或通过本发明的实践了解到。
附图说明
[0017]
构成本发明的一部分的附图用来辅助对本发明的理解,附图中所提供的内容及其在本发明中有关的说明可用于解释本发明,但不构成对本发明的不当限定。在附图中:图1为用于说明实施方式中的一种尾座式垂直起降无人飞行器的控制系统原理示意图;图2为用于说明实施方式中的一种尾座式垂直起降无人飞行器的控制系统整体结构示
意图;图3为用于说明实施方式中的一种尾座式垂直起降无人飞行器的控制系统整体结构示意图;图4为用于说明实施方式中的一种尾座式垂直起降无人飞行器的控制系统整体结构俯视示意图;图中标记:100-主控系统;110-处理模块;120-反馈信号接收模块;130-控制平台通信模块;200-推进系统;210-涡喷推进单元;211-发动机控制电路;212-发动机;;300-舵系统;310-舵机;311-舵片驱动控制电路;312-舵片驱动电机;313-舵片驱动传动机构;3131-控制长杆;3132-摇臂;3133-延伸杆;314-燃气舵片;315-空气舵片;400-反馈系统;410-角位移传感器;420-磁阻传感器;430-气压传感器;440-空速传感器;450-gps传感器;460-超声测距模块;470-视觉传感器;480-惯性测量单元。
[0018]
具体实施方式
[0019]
下面结合附图对本发明进行清楚、完整的说明。本领域普通技术人员在基于这些说明的情况下将能够实现本发明。在结合附图对本发明进行说明前,需要特别指出的是:本发明中在包括下述说明在内的各部分中所提供的技术方案和技术特征,在不冲突的情况下,这些技术方案和技术特征可以相互组合。
[0020]
此外,下述说明中涉及到的本发明的实施例通常仅是本发明一部分的实施例,而不是全部的实施例。因此,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0021]
关于本发明中术语和单位。本发明的说明书和权利要求书及有关的部分中的术语
ꢀ“
包括”以及它的任何变形,意图在于覆盖不排他的包含。
[0022]
参照图1至图4,本实施方式采用尾座式垂直起降无人飞行器的控制系统,包括主控系统100、推进系统200、舵系统300、反馈系统400。
[0023]
上述主控系统100包含处理模块110、反馈信号接收模块120和控制平台通信模块130,上述处理模块110根据反馈信号接收模块120接收到的反馈信号和控制平台通信模块130接收的控制信号生成飞行控制指令;上述推进系统200包含涡喷推进单元210,上述涡喷推进单元210主要由发动机212和相应的发动机控制电路211所组成,上述发动机控制电路211根据上述飞行控制指令中的相关指令控制对应发动机212运行;上述舵系统300包含舵机310,上述舵机310主要由舵片和相应的舵片驱动电机312、舵片驱动传动机构313和舵片驱动控制电路311所组成,上述舵片驱动控制电路311根据上述无人飞行器飞行控制指令中的相关指令控制对应一个舵片驱动电机312运行并通过舵片驱动传动机构313使对应舵片转动;上述反馈系统400包含用于获得生成上述飞行控制指令所需的飞行状况的传感器,上述传感器将获得的检测信号作为上述反馈信号发送至上述反馈信号接收模块120并通过该反馈信号接收模块120发送至处理模块110进行处理;上述舵片包括设置于发动机212喷管处的燃气舵片314和布置于发动机212侧方的空气
舵片315,上述空气舵片315转轴设置于无人飞行器的机翼上,上述舵片驱动传动机构313包含与活动连接在发动机212上的控制长杆3131,上述控制长杆3131两端分别连接上述燃气舵片314和空气舵片315,用于将上述燃气舵片314和空气舵片315联动;舵片驱动电机312与控制长杆3131连接,用于驱动该控制长杆3131运动;上述传感器将获得的检测信号作为上述反馈信号发送至上述反馈信号接收模块120,上述处理模块110根据反馈信号接收模块120控制舵片驱动电机312以使控制长杆3131运动行程,用于带动上述空气舵片315和燃气舵片314的联动。
[0024]
尾座式垂直起降无人飞行器的控制系统,包括空气动力控制和推力矢量控制,其中空气动力控制靠空气舵片315在空气来流的作用下产生控制力和控制力矩,推力矢量控制则由燃气舵片314在高温高压燃气作用下产生控制力和控制力矩,二者共用一套执行机构,由舵片驱动电机312驱动带动舵偏驱动转动机构313和控制长杆3131驱动舵片偏转,产生复合控制力和控制力矩,处理模块110根据反馈信号接收模块120控制舵片驱动电机312以使控制长杆3131运动行程,用于带动上述空气舵片315和燃气舵片314的联动。
[0025]
无人飞行器在垂直起降阶段,飞行速度较低,此时空气舵片315偏转产生的控制力和控制力矩有限,但在该状态发动机212油门较大,此时主要利用燃气舵片314在高温高压燃气作用下,产生控制力及力矩调整飞行器姿态;巡航平飞阶段油门较小,此时燃气舵控制力和控制力矩有限,飞行器的姿态主要由具有较大面积的空气舵片315控制;大攻角机动飞行时,此时通过加大油门,利用燃气舵产生的操纵力及力矩弥补空气舵片失速导致的操纵效率损失。空气/推力矢量复合控制能够保证垂直起降无人飞行器在各个状态都具有足够的操纵能力,完成飞行任务。
[0026]
通过这样的一个舵片驱动电机312驱动一控制长杆3131,控制长杆3131就可带动燃气舵片314和空气舵片315,使本舵系统300就具有足够的操纵能力。
[0027]
上述的反馈系统400的传感器包含有角位移传感器410,除了角位移传感器410以外,该反馈系统400的传感器还可以包含磁阻传感器420、气压传感器430、空速传感器440、gps传感器450、超声测距模块460、视觉传感器470和惯性测量单元480中的至少一种。
[0028]
控制长杆3131一端设置有摇臂3132,上述空气舵片315通过与该空气舵片315固定连接的转轴设置在无人飞行器的机翼上;上述摇臂3132的一端与控制长杆3131的一端铰接,该摇臂3132的另一端与空气舵片315的转轴固定连接,用于摇臂3132绕转轴轴心转动时带动该转轴转动。
[0029]
这里的摇臂3132设置在控制长杆3131的一侧上,优选的设置在远离发动机212的一侧。上述的空气舵片315的转轴也连接在无人飞行器的机翼上,摇臂3132的上述转轴与摇臂3132的连接可以采用销键或键槽配合等连接方式进行固定。
[0030]
发动机212上设置有位于该发动机212的壳体上的外架,上述传感器设置于该外架上,上述控制长杆3131的一部分与传感器传动连接,使传感器与燃气舵片314、空气舵片315通过该控制长杆3131联动。
[0031]
上述外架设置套装在发动机212外的卡箍上,这里的外架起到舵片驱动电机312的基座作用,同时也是传感器的安装基座。
[0032]
控制长杆3131中段上连接有一延伸杆3133,上述传感器上设置有可自转的联动
件,上述延伸杆3133与上述传感器的联动件连接,使该延伸杆3133绕联动件转动时传感器接收到转动信号;上述延伸杆3133与摇臂3132平行设置,使延伸杆3133、控制长杆3131、摇臂3132和外架的一部分形成平行四连杆机构。这里的传感器优选的为角位移传感器410,通过设置本摇臂3132和上述的延伸杆3133,以保障延伸杆3133和摇臂3132的运作。这样形成上述的连杆机构也保障控制长杆3131的行程方向的确定。
[0033]
摇臂3132一端为宽端,另一端为窄端,该宽端与控制长杆3131连接,该窄端与空气舵片315连接,以优化长杆与摇臂3132的受力。
[0034]
上述控制长杆3131和摇臂3132之间夹持有隔热件,这的隔热件可以是设置在摇臂3132与控制长杆3131之间的垫片,即该垫片套在摇臂3132和控制长杆3131之间的连接轴上;当然,这里的控制长杆3131还可通过隔热轴承连接摇臂3132的宽端。
[0035]
涡喷推进单元210包含由两个发动机212组成的发动机组,两个发动机212上设置的控制长杆3131相对于两个发动机212中间的对称轴对称设置。分别设置在两个控制长杆3131上的空气舵片315对称设置且位于同一平面内。控制长杆3131为沿一方向延伸的直杆,设置为直杆不仅使传动简洁,也可以节省占用空间。这里的直杆也可以是并非完全的直线延伸,根据周围部件的布置情况,可以对该控制长杆3131做部分调整,如在控制长杆3131的侧边布置有舵片驱动电机312,就可以让控制长杆3131对应舵片驱动电机312的部分做适当弯曲,当整体延伸方向依然保持一个方向的延伸。同一平面内的两个空气舵片315,在该平面内,该空气舵片315的转轴的垂线与发动机212的轴向方向的夹角为0-5
°
或2-3
°
,这里优选的可设置2
°
42
′
,在该角度下可以使空气舵片315的控制最优。
[0036]
以上对本发明的有关内容进行了说明。本领域普通技术人员在基于这些说明的情况下将能够实现本发明。基于本发明的上述内容,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips