
 商标分类
商标分类  商标转让
商标转让 
一种多用途低空飞行器的制作方法
 2021-02-13 03:02:57|
2021-02-13 03:02:57| 224|
224| 起点商标网
起点商标网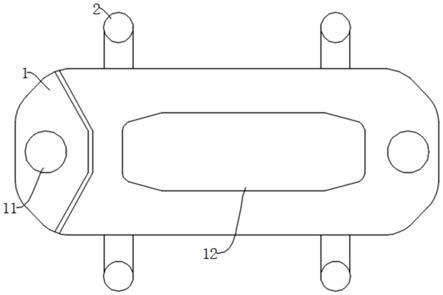
[0001]
本发明涉及飞行器技术领域,尤其涉及一种多用途低空飞行器。
背景技术:
[0002]
近年来,无人机逐渐为大众所熟悉,大型的飞行器可以代替人工进行自动巡逻的任务。现有的技术中,救灾领域的飞行器在对火灾的扑灭和现场降落救援方面存在不足,对于救灾现场的失火区域的识别分类不够细致,导致灭火过程中不能有效的阻止火情,同时对于火灾的蔓延趋势不能很好的判断,不能根据救灾现场的实际情况调整灭火的优先顺序,导致救灾的有效性存在不足,使得灭火资源出现浪费,也会导致灾情继续蔓延或者延长救灾时间,同时在进行降落救援方面通常都是根据预先设定的降落点进行降落,很多时候预先设定的降落点距离灾情现场的距离较远,伤员不能第一时间送到飞行器上,导致伤员的救治被延误。
技术实现要素:
[0003]
针对现有技术存在的不足,本发明目的是提供一种多用途低空飞行器,通过识别现场的灾情信息能够进行进行有效的灭火救灾,并且能够对灾情现场的地面信息进行处理获取最优的降落位置,以解决现有的飞行器在救灾方面存在不足的问题。
[0004]
为了实现上述目的,本发明是通过如下的技术方案来实现:一种多用途低空飞行器,包括飞行控制器、飞行器主体、灭火机构、降落调整机构、信息识别机构以及无线收发器,所述无线收发器用于与地面遥控站进行无线连接,所述灭火机构设置在飞行器主体底部,所述降落调整机构设置有四组,四组降落调整机构分别设置在飞行器主体底部四角,所述降落调整机构用于调整飞行器主体下落时底部四角的支撑位置和支撑高度,所述信息识别机构用于获取救灾现场信息,所述飞行控制器用于对接收到的救灾现场信息进行处理得到救援条件,所述飞行控制器根据救援条件实施救援;
[0005]
所述救援条件包括灭火机构的灭火区域和灭火顺序以及四组降落调整机构的支撑位置和支撑高度;
[0006]
所述信息识别机构包括热成像探测器、摄像头以及测距仪,所述热成像探测器用于获取救灾现场的热成像信息,所述摄像头用于获取救灾现场的图片信息,所述测距仪用于获取救灾现场的地面物体与飞行器主体之间的距离,所述救灾现场信息包括救灾现场的热成像信息、救灾现场的图片信息以及救灾现场的地面物体与飞行器主体之间的距离;
[0007]
所述飞行控制器内设置有信息处理模块和存储器,所述存储器内存储有火焰热成像信息、火焰图片信息以及焚烧后图片信息,所述信息处理模块内设置有第一对比单元、校准单元以及第一划定单元,所述第一对比单元根据接收到的救灾现场的热成像信息与存储的火焰热成像信息进行比对得到第一火焰区域,所述第一对比单元根据接收到的救灾现场的图片信息与存储的火焰图片信息进行比对得到第二火焰区域,所述第一对比单元根据接收到的救灾现场的图片信息与存储的焚烧后图片信息进行比对得到毁坏区域,所述校准单
元将第一火焰区域和第二火焰区域进行重合校准得到第三火焰区域,所述第三火焰区域包括第一火焰区域和第二火焰区域的若干重合区域,所述第一划定单元将第三火焰区域的外围区域划定为待定区域,所述第一划定单元将待定区域去除毁坏区域的部分划定为失火风险区域,所述第一划定单元将第三火焰区域临近失火风险区域的一侧设置为一级灭火区域,所述第一划定单元将第三火焰区域临近毁坏区域的一侧设置为二级灭火区域,所述灭火区域包括一级灭火区域和二级灭火区域,所述灭火顺序设置为一级灭火区域高于二级灭火区域;
[0008]
所述信息处理模块内还设置有第二对比单元、第二划定单元以及计算单元,所述存储器内还包括若干种的硬质地面信息以及四组降落调整机构的支撑面积调整范围和支撑高度调整值,所述第二对比单元根据接收到的救灾现场的图片信息与存储的若干种的硬质地面信息进行比对得到若干第一待降落区域,所述第二划定单元将第一待降落区域中去除毁坏区域的部分划定为第二待降落区域,所述第二划定单元将至少一块第二待降落区域落入四组降落调整机构的支撑面积调整范围内的区域划定为第三待降落区域,所述计算单元根据接收到的救灾现场的地面物体与飞行器主体之间的距离计算得到第三待降落区域的高度差值,所述第二划定单元将第三待降落区域的高度差值小于支撑高度调整值的区域划定为四组降落调整机构的支撑位置,所述计算单元配置有第一算法,所述计算单元根据第一算法计算得到四组降落调整机构的支撑高度。
[0009]
进一步地,四组降落调整机构的支撑位置与飞行器主体之间的距离分别设置为第一距离值、第二距离值、第三距离值以及第四距离值,所述所述第一算法配置为p=a
n-a1,其中,p为支撑高度值,an分别为第一距离值、第二距离值、第三距离值以及第四距离值,a1为第一距离值、第二距离值、第三距离值以及第四距离值中的最小值。
[0010]
进一步地,所述灭火机构包括干粉灭火组件以及喷水灭火组件,所述干粉灭火组件用于喷射干粉进行灭火,所述喷水灭火组件用于喷水进行灭火。
[0011]
进一步地,所述干粉灭火组件包括干粉储存罐、喷射器以及第一角度调节单元,所述干粉储存罐设置在飞行器主体底部,所述干粉储存罐的输出端与喷射器相连接,所述第一角度调节单元用于调整喷射器的喷射角度。
[0012]
进一步地,所述喷水灭火组件包括第二角度调节单元、喷嘴以及固定座,所述喷嘴通过固定座与飞行器主体底部相连接,所述第二角度调节单元用于调整喷嘴的喷射角度,所述喷嘴通过水管与地面高压水泵相连。
[0013]
进一步地,所述飞行器主体底部连接有绑带,所述绑带用于对水管进行固定。
[0014]
进一步地,所述降落调整机构包括旋转组件、伸缩组件以及伸缩支腿,所述旋转组件固定在飞行器主体底部并用于带动伸缩组件进行转动,所述伸缩组件垂直连接在旋转组件底部并用于带动伸缩支腿进行水平移动,所述伸缩支腿固定在伸缩组件远离旋转组件一端的底部。
[0015]
进一步地,所述伸缩组件包括第一连接座、液压缸、加固杆以及第二连接座,所述第一连接座与旋转组件相连接,所述液压缸的输出杆与第二连接座相连接,所述加固杆的一端与第一连接座固定连接,所述加固杆远离第一连接座的一端与第二连接座滑动连接,所述第二连接座的顶部设置有支撑座,所述支撑座顶部与飞行器主体的底部活动贴合。
[0016]
进一步地,所述飞行器主体的底部设置有圆板,所述旋转组件穿过支撑板的中间
与伸缩组件相连接,所述圆板的半径大于第二连接座的最长伸出距离,所述支撑座的顶部与圆板底面活动贴合。
[0017]
进一步地,所述飞行器主体顶部设置有担架,所述飞行器主体顶部位于担架的两端分别设置有一组降落伞机构。
[0018]
本发明的有益效果:本发明通过获取救灾现场的热成像信息和图片信息进行处理后得到一级灭火区域和二级灭火区域,一级灭火区域靠近还未被烧到的物品一侧,二级灭火区域靠近的是已经被焚烧后的物品一侧,因此设定一级灭火区域的灭火优先级高于二级灭火区域,可以有效的阻断火情,提高灭火的有效性;
[0019]
本发明通过将能够满足四组降落调整机构的支撑面积调整范围的区域,并且去除毁坏区域的部分设定为第三待降落区域,并且通过测定第三待降落区域内的高度差值小于支撑高度调整值的区域设定为支撑位置,能够及时在灾情现场获取可降落的区域从而提高降落的安全性,能够使飞行器主体的降落位置尽量靠近灾情现场,满足救援的及时性。
[0020]
本发明的降落调整机构包括旋转组件、伸缩组件以及伸缩支腿,该设计能够使伸缩支腿在一定范围内进行活动,并能够进行高度的调整,从而增加了降落的支撑点,提高了及时降落的可能性,从而提高了救援的及时有效性;
[0021]
本发明的伸缩组件包括有第一连接座、液压缸、加固杆以及第二连接座,加固杆能够提高支撑的强度,并且在第二连接座的顶部设置支撑座,在飞行器主体的底部设置圆板与支撑座贴合,能够增加飞行器主体与伸缩支腿之间的支撑点,从而提高支撑的稳定性,保证降落的安全性。
[0022]
本发明的飞行器主体顶部设置有担架和两组降落伞机构,担架能够固定伤员,两组降落伞机构能够为飞行器的安全增加保险,从而保证伤员运输过程中的安全性。
附图说明
[0023]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0024]
图1为飞行器主体的俯视图;
[0025]
图2为飞行器主体的仰视图;
[0026]
图3为灭火机构的结构示意图;
[0027]
图4为飞行器主体的侧视图;
[0028]
图5为伸缩组件的结构示意图;
[0029]
图6为第一连接座与旋转组件的连接示意图;
[0030]
图7为第二角度调节单元与喷嘴的连接剖面图;
[0031]
图8为本发明的控制原理框图;
[0032]
图9为信息处理模块的原理框图。
[0033]
图中:1、飞行器主体;11、降落伞机构;12、担架;13、圆板;2、动力组件;3、灭火机构;31、干粉灭火组件;311、喷射器;312、喷管;313、第一角度调节单元;314、干粉储存罐;32、喷水灭火组件;321、固定座;322、第二角度调节单元;3221、第二电机;3222、第二联轴器;3223、第一连接头;3224、第二连接头;3225、连接板;3226、转轴;323、喷嘴;324、水管;325、绑带;33、固定箱;4、降落调整机构;41、伸缩支腿;42、伸缩组件;421、第一连接座;
4211、轴承;422、液压缸;423、第二连接座;4231、滚珠;4232、支撑座;424、加固杆;4241、限位头;43、旋转组件;431、第一电机;4311、第一联轴器;5、信息识别机构。
具体实施方式
[0034]
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
[0035]
请参阅图1、图2、图8和图9,图1为飞行器主体1的俯视图;图2为飞行器主体1的仰视图;图8为本发明的控制原理框图;图9为信息处理模块的原理框图。
[0036]
一种多用途低空飞行器,包括飞行控制器、飞行器主体1、灭火机构3、降落调整机构4、信息识别机构5以及无线收发器,飞行器主体1的两侧对称设置有四组动力组件2,四组动力组件2中分别采用四组涡喷发动机作为动力输出。
[0037]
无线收发器用于与地面遥控站进行无线连接,通过地面遥控站能使飞行器主体1飞到救灾现场,灭火机构3设置在飞行器主体1底部,降落调整机构4设置有四组,四组降落调整机构4分别设置在飞行器主体1底部四角,降落调整机构4用于调整飞行器主体1下落时底部四角的支撑位置和支撑高度,四组降落调整机构4能够在降落地面不平整时进行调整,并且可以在一定范围内调整支撑的位置,信息识别机构5用于获取救灾现场信息,信息识别机构5将救灾现场信息获取后传输至飞行控制器内,飞行控制器用于对接收到的救灾现场信息进行处理得到救援条件,飞行控制器根据救援条件实施救援。
[0038]
飞行器主体1顶部设置有担架12,担架12可用于对伤员进行固定,飞行器主体1顶部位于担架12的两端分别设置有一组降落伞机构11,两组降落伞机构11能够在飞行器主体1在飞行过程中出现故障时可以紧急打开,提高了飞行的安全保障。
[0039]
救援条件包括灭火机构3的灭火区域和灭火顺序以及四组降落调整机构4的支撑位置和支撑高度,区分灭火区域能够对救灾的紧急程度进行划分,灭火顺序会根据灭火区域的紧急程度进行排序,能够对靠近未燃烧物一侧的火焰优先进行扑灭,有效阻止火情蔓延,有助于提高救灾的有效性,四组降落调整机构4能够从飞行器主体1的底部四个角进行高度和位置的调整,飞行控制器内设置有四个调整单元可用于分别调整四组降落调整机构4,在遇到降落地面情况复杂,硬质地面高低不平时或者支撑的位置有偏差时,可通过调整四组降落调整机构4实现对支撑位置和支撑高度的调整。
[0040]
信息识别机构5包括热成像探测器、摄像头以及测距仪,热成像探测器用于获取救灾现场的热成像信息,热成像信息能够反映火灾现场的高温区域,摄像头用于获取救灾现场的图片信息,救灾现场的图片信息能够反映火焰的位置,测距仪用于获取救灾现场的地面物体与飞行器主体1之间的距离,该信息能够用于计算四组降落调整机构4分别需要支撑的高度,救灾现场信息包括救灾现场的热成像信息、救灾现场的图片信息以及救灾现场的地面物体与飞行器主体1之间的距离。
[0041]
飞行控制器内设置有信息处理模块和存储器,存储器内存储有火焰热成像信息、火焰图片信息以及焚烧后图片信息,信息处理模块内设置有第一对比单元、校准单元以及第一划定单元,第一对比单元根据接收到的救灾现场的热成像信息与存储的火焰热成像信息进行比对得到第一火焰区域,第一对比单元根据接收到的救灾现场的图片信息与存储的火焰图片信息进行比对得到第二火焰区域,第一对比单元根据接收到的救灾现场的图片信
息与存储的焚烧后图片信息进行比对得到毁坏区域。
[0042]
校准单元将第一火焰区域和第二火焰区域进行重合校准得到第三火焰区域,由于第一火焰区域和第二火焰区域会存在一定的偏差,比如火焰热成像信息中会包括一些高温区域类似于火焰的热成像信息,尤其在工厂车间内,一些焚烧炉或加热桶也会呈现出高温的热成像信息,同时火焰图片信息中也会由于一些地面物体表面颜色的近似进行误判,因此将第一火焰区域和第二火焰区域重合的部分设定为第三火焰区域,能够进一步降低真实燃烧的火焰区域的误判率,提高对救灾现场的燃烧区域的精准判断,因此第三火焰区域包括第一火焰区域和第二火焰区域的若干重合区域。
[0043]
第一划定单元将第三火焰区域的外围区域划定为待定区域,第一划定单元将待定区域去除毁坏区域的部分划定为失火风险区域,第一划定单元将第三火焰区域临近失火风险区域的一侧设置为一级灭火区域,一级灭火区域由于靠近失火风险区域,失火风险区域属于还未被烧到的区域,因此一级灭火区域是需要优先进行灭火的,第一划定单元将第三火焰区域临近毁坏区域的一侧设置为二级灭火区域,毁坏区域属于燃烧过的区域,因此二次燃烧的可能性极小,并且从救援的角度来说,被烧毁后的区域的救援价值要小于为燃烧区域的救援价值,灭火区域包括一级灭火区域和二级灭火区域,因此从持续燃烧的可能性以及救援价值的角度来说,灭火顺序设置为一级灭火区域高于二级灭火区域。
[0044]
信息处理模块内还设置有第二对比单元、第二划定单元以及计算单元,存储器内还包括若干种的硬质地面信息以及四组降落调整机构4的支撑面积调整范围和支撑高度调整值,第二对比单元根据接收到的救灾现场的图片信息与存储的若干种的硬质地面信息进行比对得到若干第一待降落区域,第二划定单元将第一待降落区域中去除毁坏区域的部分划定为第二待降落区域,第二划定单元将至少一块第二待降落区域落入四组降落调整机构4的支撑面积调整范围内的区域划定为第三待降落区域,首先第三待降落区域要满足是硬质的地面,其次要是没有被焚烧的区域,因为焚烧区域的危险性不可知,最后要是能够满足四组降落调整机构4的支撑面积调整范围,在飞行器主体1降落时,使四组降落调整机构4能够找到对应位置进行支撑。
[0045]
计算单元根据接收到的救灾现场的地面物体与飞行器主体1之间的距离计算得到第三待降落区域的高度差值,第二划定单元将第三待降落区域的高度差值小于支撑高度调整值的区域划定为四组降落调整机构4的支撑位置,计算单元配置有第一算法,计算单元根据第一算法计算得到四组降落调整机构4的支撑高度。
[0046]
四组降落调整机构4的支撑位置与飞行器主体1之间的距离分别设置为第一距离值、第二距离值、第三距离值以及第四距离值,第一算法配置为p=a
n-a1,其中,p为支撑高度值,an分别为第一距离值、第二距离值、第三距离值以及第四距离值,a1为第一距离值、第二距离值、第三距离值以及第四距离值中的最小值,该设计中,第一距离值、第二距离值、第三距离值以及第四距离值中的最小值对应的一组降落调整机构4不进行高度的调整,其一三组的支撑高度分别用对应的距离值减去最小值得出,在具体的一种实施例中,测量出能够适合降落的四个支撑位置的第一距离值、第二距离值、第三距离值以及第四距离值分别为50.6m、50.2m、50.3m以及50.3m,通过第一算法计算得出四组降落调整机构4对应的支撑高度为0.4m、0m、0.1m以及0.1m。
[0047]
请参阅图3和图4,图3为灭火机构的结构示意图;图4为飞行器主体的侧视图。
[0048]
灭火机构3包括干粉灭火组件31以及喷水灭火组件32,干粉灭火组件31用于喷射干粉进行灭火,喷水灭火组件32用于喷水进行灭火,飞行器主体1底部设置有固定箱33,灭火机构3设置在固定箱33内。
[0049]
干粉灭火组件31包括干粉储存罐314、喷射器311以及第一角度调节单元313,干粉储存罐314设置在飞行器主体1底部,干粉储存罐314的输出端与喷射器311相连接,第一角度调节单元313用于调整喷射器311的喷射角度,喷射器311的输出端连接有喷管312,第一角度调节单元313调整好喷管312的喷出方位,喷射器311通过将干粉储存罐314内的干粉吸入并通过喷管312喷出到灭火区域进行灭火。
[0050]
喷水灭火组件32包括第二角度调节单元322、喷嘴323以及固定座321,喷嘴323通过固定座321与飞行器主体1底部相连接,第二角度调节单元322用于调整喷嘴323的喷射角度,喷嘴323通过水管324与地面高压水泵相连,飞行器主体1底部连接有绑带325,绑带325用于对水管324进行固定,在使用喷水灭火组件32时,可在地面设定好高压水泵并连接水源,通过水管324连接高压水泵,水管324的另一端与喷嘴323固定,并且通过绑带325对水管324进行固定,防止输水过程中水管324的重量直接对喷嘴323造成压力,喷嘴323通过第二角度调节单元322进行调整角度,能够对准灭火区域进行灭火。
[0051]
第二角度调整单元包括固定架、第二电机3221、第二联轴器3222、第一连接头3223、第二连接头3224、连接板3225以及转轴3226,固定架固定在飞行器主体1的底部,第二电机3221固定在固定架上,第二电机3221的通过第二联轴器3222与喷嘴323相固定,用于带动喷嘴323进行转动,喷嘴323远离第二电机3221的一侧设置有第一连接头3223,第一连接头3223与固定架转动连接,喷嘴323的顶部还设置有第二连接头3224,第二连接头3224通过连接板3225与喷嘴323进行固定,第二连接头3224远离连接板3225的一端通过转轴3226与固定架转动连接,第一角度调节单元313与第二角度调节单元322的结构相同,第一角度调节单元313安装在喷管312外侧,用于调整喷管312的喷射角度。
[0052]
请参阅图5-图7,图5为伸缩组件的结构示意图;图6为第一连接座与旋转组件的连接示意图;图7为第二角度调节单元与喷嘴的连接剖面图。
[0053]
降落调整机构4包括旋转组件43、伸缩组件42以及伸缩支腿41,旋转组件43固定在飞行器主体1底部并用于带动伸缩组件42进行转动,伸缩组件42垂直连接在旋转组件43底部并用于带动伸缩支腿41进行水平移动,伸缩支腿41固定在伸缩组件42远离旋转组件43一端的底部。
[0054]
旋转组件43和伸缩组件42进行配合,能够用于调整伸缩支腿41在水平方向上的位置,调整好支撑位置后,伸缩支腿41进行伸缩运作调整支撑的高度。
[0055]
伸缩组件42包括第一连接座421、液压缸422、加固杆424以及第二连接座423,第一连接座421与旋转组件43相连接,液压缸422的输出杆与第二连接座423相连接,加固杆424的一端与第一连接座421固定连接,加固杆424远离第一连接座421的一端与第二连接座423滑动连接,第二连接座423的顶部设置有支撑座4232,支撑座4232顶部与飞行器主体1的底部活动贴合,液压缸422进行伸出缩回运作时能够带动第二连接座423移动,第二连接座423移动时能够带动伸缩支腿41进行移动,能够调整伸缩支腿41在水平方向上的支撑位置,加固杆424与第二连接座423活动连接能够对水平方向的支撑进行加固,加固杆424远离第一连接座421的一端设置有限位头4241,限位头4241用于限定第二连接座423的伸出距离。
[0056]
飞行器主体1的底部设置有圆板13,旋转组件43穿过支撑板的中间与伸缩组件42相连接,圆板13的半径大于第二连接座423的最长伸出距离,支撑座4232的顶部与圆板13底面活动贴合,支撑座4232顶部设置有若干滚珠4231,滚珠4231能够使支撑座4232与圆板13底面滚动贴合,支撑座4232与圆板13的贴合位置以及伸缩支腿41的支撑方向在同一条直线上,支撑座4232能够承托对飞行器主体1的下压力,旋转组件43包括第一电机431和第一联轴器4311,第一电机431通过第一联轴器4311与第一连接座421相连接,同时第一连接座421与飞行器主体1的连接处通过轴承4211相连接,能够避免支撑时的支撑力作用于第一电机431的输出轴上。
[0057]
工作原理:首先飞行器主体1通过地面遥控站飞到指定救灾现场,通过信息识别机构5进行救灾现场信息获取,获取后通过飞行控制器处理后得出灭火区域和灭火顺序,飞行控制器控制灭火机构3进行灭火,根据灭火顺序先对一级灭火区域进行灭火,再对二级灭火区域进行灭火,灭火后,通过识别救灾现场的地面信息,获取四组降落调整机构4的支撑位置并计算出支撑高度,调整后对应支撑位置进行降落,将伤员固定在飞行器主体1的担架12上,再控制飞行器主体1飞往医院,能够及时对伤员进行救治,提高救援的有效性和及时性。
[0058]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 飞行高度

 热门咨询
热门咨询




tips