
 商标分类
商标分类  商标转让
商标转让 
一种攻角传感器装置及攻角传感器控制系统的制作方法
 2021-02-13 02:02:23|
2021-02-13 02:02:23| 187|
187| 起点商标网
起点商标网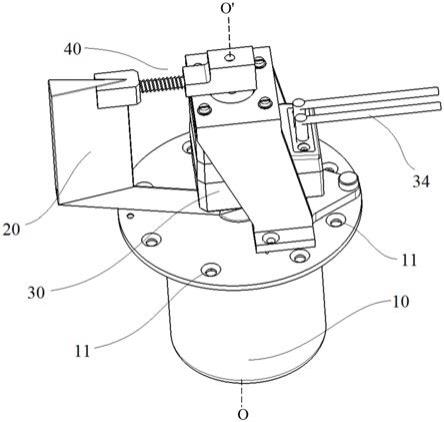
[0001]
本实用新型涉及飞机测试设备领域,尤其涉及一种攻角传感器装置及攻角传感器控制系统。
背景技术:
[0002]
在飞机领域,攻角是指机翼的前进方向和翼弦的夹角,它用于确定机翼在气流中的姿态。机翼产生的升力和阻力与攻角直接相关,在失速临界角之前,相同空速下,攻角越大,升力越大;超过失速临界角后,随着攻角的增大,机翼的升力急剧下降。攻角在飞行控制中是一项很重要的参数,因此在设计飞行控制系统中以及飞机生产制造过程中,都需要对攻角进行调节以验证不同攻角下产生的不同控制效果。进行失速测试试验时,操作人员需要精准地控制飞机的攻角,以此保证测试出临界攻角的大小,并验证是否达到设计指标。
[0003]
飞机的攻角信号需要综合多个攻角传感器的测量数据生成。多个攻角传感器一般分别设置在飞机机头或前机身两侧。攻角传感器上具有向外伸出可灵活转动的风标,风标用于感受风的方向。在失速测试试验中,给予飞机准确的攻角需要准确调节风标的角度,也即需要将风标相对于攻角传感器本体的位置定位准确。
[0004]
现有的攻角传感器装置仅包括传感器本体以及位于传感器本体上的风标。风标是以框架的形式设立于传感器本体的上端,其可以受外界风作用而转动或由工作人员来转动。在测试条件下,风标由工作人员来转动所需角度。根据测试要求,工作人员需要保证将这些攻角传感器的各最终角度的差值较小,并且需要保证各个风标被以相同的速率转动相应角度,否则将导致所测得的攻角数据失效。
[0005]
现有的攻角传感器调节方式含有以下两种。第一种是在攻角传感器上安装角度测量装置。工作人员手动转动攻角传感器的风标,根据角度测量装置的反馈调节攻角传感器使其被转动到给定的角度。这种方式存在缺陷在于,各个工作人员难以以相同的速率调节各个风标,各个攻角传感器之间容易出现运动中超差的情况,这会使得综合所得的攻角失效。另一种方式是通过监控设备时时监控多个传感器调节过程中各个传感器的攻角值。这种调节可以避免调节过程超差失效的问题。然而该类调节方式还是通过人工手动来调节风标。此外,由于采用该类调整方式的对应攻角传感器系统没有角度测量装置的夹具,而风标本身阻尼较小容易随风转动,这会使得工作人员在调节过程中实时利用手来把持风标,这会增大工作人员的操作难度。
技术实现要素:
[0006]
针对根据现有技术的攻角传感器装置的上述现状,本实用新型的目的之一在于提供一种攻角传感器装置,其工作人员能够方便、精确地调节各攻角传感器。
[0007]
该目的通过本实用新型以下形式的攻角传感器装置实现。其中,攻角传感器装置包括传感器本体、可转动地固定在所述传感器本体上的风标、驱动机构和锁定机构。其中,所述驱动机构具有驱动轴,且所述驱动轴的轴线与所述传感器本体的转动中心线位于同一
轴线上。所述锁定机构的一端连接所述驱动轴,另一端夹持所述风标。驱动机构被构造成能够带动风标转动。
[0008]
在该方案中,风标的角度改为由电机来电动调整。各个攻角传感器上的风标能够以同步、相同速率的方式被调节到各个角度。由于驱动机构的驱动轴被设定成与传感器本体设定成同轴有助于将风标的转动角度数据准确地向外传送。
[0009]
根据本实用新型的一种优选实施方式,所述锁定机构包括:
[0010]
连接块,所述连接块能够附接在所述驱动轴并随所述驱动轴旋转,并且所述连接块的一侧具有朝风标的方向延伸的滑杆部;
[0011]
夹持件,所述夹持件可滑动地固定在所述滑杆部,并且被构造成用于夹持所述风标;
[0012]
弹性件,所述弹性件的两端分别抵接所述连接块和所述夹持件,
[0013]
其中,当所述夹持件抵接所述风标时,所述弹性件处于受压状态。
[0014]
根据本实用新型的一种优选实施方式,所述攻角传感器装置还包括用于固定所述驱动机构的支撑架。
[0015]
根据本实用新型的一种优选实施方式,所述支撑架包括顶壁、底壁以及连接所述顶壁和底壁的侧壁,其中,所述顶壁、底壁和侧壁限定用于容纳所述驱动机构的内腔。
[0016]
根据本实用新型的一种优选实施方式,所述顶壁具有供所述驱动轴伸出的通孔。
[0017]
根据本实用新型的一种优选实施方式,所述底壁在外缘上设有多个定位孔,且所述传感器本体的上端面设有数量多于所述定位孔的锁定孔,并且所述锁定孔被配置为使得所述支撑架能够调整在所述上端面的位置,而将固定在所述支撑架上的所述驱动机构的驱动轴的轴线和所述传感器本体的转动中心线调整至同轴。
[0018]
根据本实用新型的一种优选实施方式,所述风标包括水平部以及从水平部的一端向上延伸的竖直部,所述风标通过所述水平部固定于所述传感器本体上,所述竖直部被构造成具有能够迎接不同风向的形状。
[0019]
根据本实用新型的一种优选实施方式,所述风标的形状呈三棱柱构造或后掠翼构造。
[0020]
根据本实用新型的一种优选实施方式,所述滑杆部是可拆接地固定于所述连接块的本体上的部件。
[0021]
根据本实用新型的一种优选实施方式,所述弹性件能够套接于所述滑杆部。
[0022]
根据本实用新型的一种优选实施方式,所述夹持件的朝向所述风标的端面上具有与所述风标的形状适配的开口。
[0023]
此外,本实用新型还涉及一种攻角传感器控制系统。该攻角传感器控制系统包括中央控制器,所述中央控制器与多个上述任一项攻角传感器装置通信连接,使得所述中央控制器能够致使多个所述攻角传感器装置的驱动机构同步动作。
[0024]
在符合本领域常识的基础上,上述各优选实施方式,可任意组合,即得本实用新型各较佳实例。
[0025]
通过阅读下列的附图和详细描述本领域技术人员可理解本实用新型的其他系统、方法、特征和优点。目的是所有这种额外的系统、方法、特征和优点包括在本说明书中和本实用新型内容中,且包括在本实用新型的范围内,并被所附权利要求保护。
附图说明
[0026]
为了更好地理解本实用新型的上述及其他目的、特征、优点和功能,可以参考附图中所示的优选实施方式。附图中相同的附图标记指代相同的部件。本领域技术人员应该理解,附图旨在示意性地阐明本实用新型的优选实施方式,对本实用新型的范围没有任何限制作用,图中各个部件并非按比例绘制。
[0027]
图1是本实用新型的优选实施方式的攻角传感器装置的结构示意图图;
[0028]
图2是图1的爆炸图;
[0029]
图3是图1、2的支撑架的结构示意图;
[0030]
图4是图1、2的锁定机构的结构示意图。
[0031]
附图标记说明:
[0032]
传感器本体:10;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
风标:20;
[0033]
驱动机构:30;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
锁定机构:40;
[0034]
支撑架:50;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
靠板:60;
[0035]
锁定孔:11、11a、11b;
ꢀꢀꢀ
水平部:21;
[0036]
竖直部:22;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
驱动电机:31;
[0037]
驱动轴:32;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接块:41;
[0038]
滑杆部:42;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弹性件:43;
[0039]
夹持件:44;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
顶壁:51;
[0040]
底壁:52;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
侧壁:53;
[0041]
通孔:54;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定位销钉:55;
[0042]
螺钉:56;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
衬套:57;
[0043]
贯通孔:58;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定位孔:59、59a。
具体实施方式
[0044]
接下来将参照附图详细描述本实用新型的实用新型构思。这里所描述的仅仅是根据本实用新型的优选实施方式,本领域技术人员可以在所述优选实施方式的基础上想到能够实现本实用新型的其他方式,所述其他方式同样落入本实用新型的范围。在以下的具体描述中,例如“上”、“下”、“内”、“外”、“纵”、“横”等方向性的术语,参考附图中描述的方向使用。本实用新型的实施例的部件可被置于多种不同的方向,方向性的术语是用于示例的目的而非限制性的。
[0045]
如图1、2所示的攻角传感器装置,其包括传感器本体10、可转动地固定在传感器本体10上的风标20、驱动机构30和锁定机构40。驱动机构30带动锁定机构40以传感器本体10的转动中心线oo'转动,进而带动由锁定机构40固持的风标20转动到传感器本体10的不同周向位置上。
[0046]
风标20包括水平部21以及从水平部21的一端向上延伸的竖直部22。风标20的水平部21被用来保证能够将风标20可转动地固定于传感器本体10上。风标20的竖直部22可以是如图1、2所示的三棱柱构造或未示出的后掠翼构造等任意适于迎接不同风向的风的形状。通过竖直部22,风标20能够感测来流的风向并反馈到攻角传感器本体10。
[0047]
为了避免吹向竖直部22风受水平部21的干扰而影响风标20的灵活度,水平部21的
横截面呈由上至下逐渐增大的流线型构造。在图 1、2的实施方式中,水平部21的横截面也呈三角形,且水平部21的顶角与竖直部22的朝向锁定机构40的一端的顶角对齐。
[0048]
进一步参见图1、2,根据本实用新型的驱动机构包括驱动电机31。驱动电机31的上端具有驱动轴32。其中,驱动轴32的轴线与传感器本体10的转动中心线位于同一轴线oo'上。驱动电机31通过电机电缆与外界电力连接。
[0049]
锁定机构40的一端连接驱动轴32,另一端夹持风标20。在图1、 2、4的实施方式中,锁定机构40包括连接块41、夹持件44以及弹性件43。其中连接块41设有用来套接驱动轴32的通孔以及大致与通孔垂直的滑杆部42。滑杆部42朝向风标20的方向延伸。在图1、2的实施方式中,滑杆部42是与连接块41的主体相互独立的备件,其在轴向依次设有螺纹段、滑动段。连接块41设设有与该螺纹段适配且大致与上述通孔垂直的螺纹通孔。滑动段具有光滑的周向表面,夹持件 44能够沿滑动段滑移。可选地,滑杆部42可以是连接块41的组成部分,二者形成为一体。
[0050]
夹持件44可滑动地固定在滑杆部42,其用于夹持风标20。优选地,如图1、2所示,夹持件44朝向风标20的端面上具有与风标20的形状适配的开口45。夹持件44、风标20的水平部21分别在设定在风标20的竖直部22的上、下两侧。
[0051]
在安装状态下,诸如弹簧的弹性件43的两端分别抵接连接块41 和夹持件44。优选地,弹性件43套设在上述滑杆部42。当风标20的水平部21可转动地固定在传感器本体10的上端面后,风标20的竖直段的上侧抵接夹持件44,处于受压状态弹性件43将夹持件44朝风标20压迫而使得二者贴合。电机31启动后,电机驱动轴32带动夹持件44转动,贴合于风标20的夹持件44能够带动风标20精准地转动相同角度,从而实现调节攻角传感器的目的。
[0052]
进一步参见图4并结合图1、2,攻角传感器装置可进一步设置用于固定驱动机构30的支撑架50。支撑架50包括顶壁51、底壁52以及连接顶壁51和底壁52的两个侧壁53。顶壁51、底壁52和侧壁53 限定用于容纳驱动电机31的内腔。顶壁51具有供驱动轴32伸出的通孔54,以及多个供用于紧固驱动电机31的螺栓33穿过的贯通孔58。
[0053]
底壁52在外缘上设有多个定位孔59、59a。传感器本体10的上端面设有数量多于定位孔59、59a的锁定孔11、11a、11b,并且锁定孔11、11a、11b被配置为使得支撑架50能够调整在上端面的位置,而将固定在支撑架50上的驱动机构30的驱动轴32的轴线和传感器本体10的转动中心线调整至同轴。
[0054]
例如,在图1-3所示的支撑架50中,支撑架50的底壁52设有3 个形成等腰三角形关系的定位孔59、59a。定位时,利用定位销钉55 将一个第一定位孔59a锁定在传感器本体10的对应锁定孔11、11a 上,随后,以该锁定孔11a为圆心,微调支撑架50直至驱动电机31 的驱动轴32的轴线与传感器本体10的转动中心线oo'同轴。
[0055]
参见图1,为了简化上述调节过程,攻角传感器装置可设置1个设有第二定位孔61的靠板60,第二定位孔61可以被设置成具有与第一定位孔59a相同的尺寸。靠板60远离定位孔61的侧面被用作能够抵接支撑架50的底壁52的侧面的定位面。传感器本体10上具有位于径向相对端的两个锁定孔11a、11b。在支撑架50通过定位销钉55 预定位在传感器本体10的一个锁定孔11a后,将靠板60的定位面抵靠在支撑架50的侧面上并调节靠板60以及支撑架50的位置,直至靠板60的第二定位孔61能够与上述锁定孔11a相对的另一个锁定孔 11b对齐。此时,将定位销钉55穿过第二定位孔59、59a锁定,并将支撑架50的所有定位孔59、59a锁
定在相应的锁定孔11、11a、11b 中。在固定好支撑架50后,拆卸靠板60即可。
[0056]
进一步地,在锁定孔11、11a、11b中可设置与定位销钉55配合的衬套57,避免剪切载荷对定位销钉55的影响。
[0057]
如上所述,在该实用新型公开的方案中,风标20的角度改为由电机来电动调整。各个攻角传感器上的风标20能够以同步、相同速率的方式被调节到各个角度。由于驱动机构30的驱动轴32被设定成与传感器本体10设定成同轴有助于将风标20的转动角度数据准确地向外传送。
[0058]
本实用新型的保护范围仅由权利要求限定。得益于本实用新型的教导,本领域技术人员容易认识到可将本实用新型所公开结构的替代结构作为可行的替代实施方式,并且可将本实用新型所公开的实施方式进行组合以产生新的实施方式,它们同样落入所附权利要求书的范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 传感器

 热门咨询
热门咨询




tips