
 商标分类
商标分类  商标转让
商标转让 
无人机降落设备及具有无人机降落设备的巡检车辆的制作方法
 2021-02-13 02:02:20|
2021-02-13 02:02:20| 235|
235| 起点商标网
起点商标网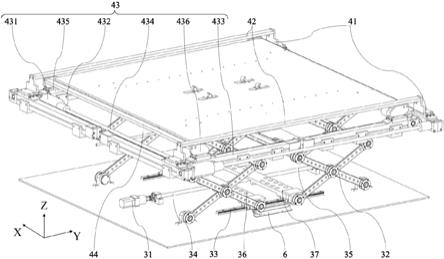
[0001]
本实用新型属于无人机技术领域,具体涉及一种无人机降落设备及具有无人机降落设备的巡检车辆。
背景技术:
[0002]
本部分提供的仅仅是与本公开相关的背景信息,其并不必然是现有技术。
[0003]
近几年随着科技的发展,无人机技术的不断成熟,无人机的使用场景越来越多,可以应用在航拍、农业、植保、快递运输、灾难救援、测绘、巡检等领域。
[0004]
但是在无人机的起飞和降落都需要一块相对平整的区域,在人群繁杂的市区或者崎岖不平、条件比较恶劣的地方,无人机降落都需要选好特定的降落和起飞的区域,使得无人机的使用范围受到了地形的限制。
技术实现要素:
[0005]
本实用新型的目的是至少解决现有技术中的无人机降落的使用范围受到了地形的限制的问题。该目的是通过以下技术方案实现的:
[0006]
本实用新型的第一方面提出了一种无人机降落设备,包括:
[0007]
箱体,所述箱体的内部形成腔室,所述腔室内设置有升降板,所述升降板设置成供无人机降落;
[0008]
箱盖,所述箱盖连接在所述箱体上,且所述箱盖设置成能够密封所述箱体;
[0009]
升降装置,所述升降装置设置在所述腔室内,所述升降装置设置成用于驱动所述升降板升降;
[0010]
调整装置,所述调整装置设置在所述箱体上,所述调整装置设置成调整所述无人机在所述升降板上的位置;
[0011]
固定装置,所述固定装置设置在所述升降装置上,所述固定装置设置成固定调整后的所述无人机。
[0012]
根据本实用新型实施例的无人机降落设备,在升降装置的驱动下,升降板能够露出箱体或收容于箱体内。升降装置驱动升降板露出箱体,无人机准备起飞,升降板收容于箱体内,箱盖能够密封箱体形成密闭的腔室,保护无人机。当无人机降落在升降板上后,其降落的位置与预期位置不一定完全重合,因此设置有调整装置,对降落后的无人机在升降板上的位置进行调整,使其符合预期。当无人机的位置调整完成后,固定装置进行无人机的固定,经过调整装置的调整后,以便于固定装置能够准确固定无人机,提高无人机降落后固定的可靠性。通过升降装置、调整装置和固定装置实现无人机的自动化降落、固定和起飞,提高了无人机作业的效率,降低了人力成本,可以对无人机实现远程控制。升降板为无人机提供了平整的区域,解决了无人机使用受到地形限制的问题。
[0013]
在本实用新型的一些实施例中,所述调整装置包括:
[0014]
第一调整组件,所述第一调整组件设置在所述箱体上;
[0015]
第一调整板,所述第一调整板连接在所述第一调整组件上,所述第一调整组件设置成用于驱动所述第一调整板运动,以调整所述无人机在所述升降板上沿第一方向的位置;
[0016]
第二调整组件,所述第二调整组件设置在所述箱体上;
[0017]
第二调整板,所述第二调整板连接在所述第二调整组件上,所述第二调整组件设置成用于驱动所述第二调整板运动,以调整所述无人机在所述升降板上沿第二方向的位置。
[0018]
在本实用新型的一些实施例中,所述第一调整组件设置有两组,两组所述第一调整组件设置在所述箱体相对的两侧,且两组所述第一调整组件之间通过所述第一调整板连接;
[0019]
所述第二调整组件设置有两组,两组所述第二调整组件设置在所述箱体另外相对的两侧,且两组所述第二调整组件之间通过所述第二调整板连接。
[0020]
在本实用新型的一些实施例中,所述第一调整组件包括:
[0021]
第一驱动件,所述第一驱动件设置在所述箱体上;
[0022]
第一传动件和第二传动件,所述第一传动件连接在所述第一驱动件上,所述第二传动件与所述第一驱动件之间通过第一同步杆连接,所述第一调整板的两端分别与所述第一传动件与所述第二传动件连接。
[0023]
在本实用新型的一些实施例中,所述第二调整组件包括:
[0024]
第二驱动件,所述第二驱动件设置在所述箱体上;
[0025]
第三传动件和第四传动件,所述第三传动件连接在所述第二驱动件上,所述第四传动件与所述第二驱动件之间通过第二同步杆连接,所述第二调整板的两端分别与所述第三传动件和所述第四传动件连接。
[0026]
在本实用新型的一些实施例中,所述固定装置包括:
[0027]
固定架,所述固定架连接在所述升降装置上;
[0028]
驱动组件,所述驱动组件连接在所述固定架上;
[0029]
固定组件,所述固定组件连接在所述驱动组件上,所述驱动组件设置成用于驱动所述固定组件固定所述无人机。
[0030]
在本实用新型的一些实施例中,所述固定组件包括:
[0031]
第一夹爪,所述第一夹爪连接在所述驱动组件上,所述驱动组件设置成用于驱动所述第一夹爪运动;
[0032]
第二夹爪,所述第二夹爪转动连接在所述驱动组件上,所述驱动组件设置成用于所述第二夹爪翻转,以使所述第一夹爪和所述第二夹爪固定所述无人机。
[0033]
在本实用新型的一些实施例中,所述第一夹爪和所述第二夹爪的轮廓匹配所述无人机的起落架的轮廓。
[0034]
在本实用新型的一些实施例中,所述箱盖包括:
[0035]
第三驱动件,所述第三驱动件设置在所述箱体上;
[0036]
卷帘门,所述卷帘门设置在所述箱体上,且所述第三驱动件与所述卷帘门连接,所述第三驱动件设置成用于驱动所述卷帘门打开或收卷,以密封或打开所述箱体。
[0037]
本实用新型的第二方面提供了一种巡检车辆,包括上述任一技术方案中的无人机
降落设备,所述无人机降落设备设置在所述巡检车辆的顶部。
[0038]
根据本实用新型实施例的巡检车辆与上述无人机降落设备具有相同的优势,在此不再赘述。
附图说明
[0039]
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本实用新型的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
[0040]
图1为本实用新型实施例的无人机降落设备未打开时的立体结构示意图;
[0041]
图2为图1所示的无人机降落设备打开无人机降落后的立体结构示意图;
[0042]
图3为图1所示的无人机降落设备的内部结构示意图;
[0043]
图4为图1所示的无人机降落设备的内部结构示意图;
[0044]
图5为图1所示的无人机降落设备的固定装置的立体结构示意图。
[0045]
附图中各标记表示如下:
[0046]
1、箱体;11、升降板;
[0047]
2、箱盖;21、第三驱动件;22、卷帘门;
[0048]
3、升降装置;31、第四驱动件;32、剪叉臂;33、导轨;34、第三丝杠;35、第四丝杠;36、第七滑块;37、第八滑块;
[0049]
4、调整装置;41、第一调整组件;42、第一调整板;43、第二调整组件;44、第二调整板;411、第一驱动件;412、第一传动件;413、第二传动件;414、第一同步杆;415、第一滑块;416、第二滑块;431、第二驱动件;432、第三传动件;433、第四传动件;434、第二同步杆;435、第三滑块;436、第四滑块;
[0050]
5、固定装置;51、固定架;52、驱动电机;53、第一丝杠;54、第二丝杠;55、第五滑块;56、第六滑块;57、第一夹爪;58、第二夹爪;511、第一限位槽;512、第二限位槽;
[0051]
6、接近开关;
[0052]
7、控制装置;
[0053]
8、无人机。
具体实施方式
[0054]
下面将参照附图更详细地描述本公开的示例性实施方式。虽然附图中显示了本公开的示例性实施方式,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0055]
应理解的是,文中使用的术语仅出于描述特定示例实施方式的目的,而无意于进行限制。除非上下文另外明确地指出,否则如文中使用的单数形式“一”、“一个”以及“所述”也可以表示包括复数形式。术语“包括”、“包含”、“含有”以及“具有”是包含性的,并且因此指明所陈述的特征、步骤、操作、元件和/或部件的存在,但并不排除存在或者添加一个或多个其它特征、步骤、操作、元件、部件、和/或它们的组合。
[0056]
尽管可以在文中使用术语第一、第二、第三等来描述多个元件、部件、区域、层和/
或部段,但是,这些元件、部件、区域、层和/或部段不应被这些术语所限制。这些术语可以仅用来将一个元件、部件、区域、层或部段与另一区域、层或部段区分开。除非上下文明确地指出,否则诸如“第一”、“第二”之类的术语以及其它数字术语在文中使用时并不暗示顺序或者次序。因此,以下讨论的第一元件、部件、区域、层或部段在不脱离示例实施方式的教导的情况下可以被称作第二元件、部件、区域、层或部段。
[0057]
为了便于描述,可以在文中使用空间相对关系术语来描述如图中示出的一个元件或者特征相对于另一元件或者特征的关系,这些相对关系术语例如为“内部”、“外部”、“内侧”、“外侧”、“下面”、“下方”、“上面”、“上方”等。这种空间相对关系术语意于包括除图中描绘的方位之外的在使用或者操作中装置的不同方位。例如,如果在图中的装置翻转,那么描述为“在其它元件或者特征下面”或者“在其它元件或者特征下方”的元件将随后定向为“在其它元件或者特征上面”或者“在其它元件或者特征上方”。因此,示例术语“在
……
下方”可以包括在上和在下的方位。装置可以另外定向(旋转90度或者在其它方向)并且文中使用的空间相对关系描述符相应地进行解释。
[0058]
如图1至图5所示,根据本实用新型的一个实施例提出了一种无人机降落设备,包括:
[0059]
箱体1,箱体1的内部形成腔室,腔室内设置有升降板11,升降板11设置成供无人机8降落;
[0060]
箱盖2,箱盖2连接在箱体1上,且箱盖2设置成能够密封箱体1;
[0061]
升降装置3,升降装置3设置在腔室内,升降装置3设置成用于驱动升降板11升降;
[0062]
调整装置4,调整装置4设置在箱体1上,调整装置4设置成调整无人机8在升降板11上的位置;
[0063]
固定装置5,固定装置5设置在升降装置3上,固定装置5设置成固定调整后的无人机8。
[0064]
根据本实用新型实施例的无人机降落设备,在升降装置3的驱动下,升降板11能够露出箱体1或收容于箱体1内。升降装置3驱动升降板11露出箱体1,无人机8准备起飞,升降板11收容于箱体1内,箱盖2能够密封箱体1形成密闭的腔室,保护无人机8。当无人机8降落在升降板11上后,其降落的位置与预期位置不一定完全重合,因此设置有调整装置4,对降落后的无人机8在升降板11上的位置进行调整,使其符合预期。当无人机8的位置调整完成后,固定装置5进行无人机8的固定,经过调整装置4的调整后,以便于固定装置5能够准确固定无人机8,提高无人机8降落后固定的可靠性。通过升降装置3、调整装置4和固定装置5实现无人机8的自动化降落、固定和起飞,提高了无人机8作业的效率,降低了人力成本,可以对无人机8实现远程控制。升降板11为无人机8提供了平整的区域,解决了无人机8使用受到地形限制的问题,无论是在热闹的市里,还是在条件恶劣的地方,无人机8可以随时自主起飞和降落。
[0065]
在本实用新型的一些实施例中,如图2至图4所示,无人机降落设备包括三个方向,第一方向为x方向,第二方向为y方向,第三方向为z方向。调整装置4包括第一调整组件41和第一调整板42,第一调整组件41设置在箱体1上,第一调整板42连接在第一调整组件41上。在第一调整组件41的驱动下,第一调整板42向靠近无人机8的方向运动,以调整无人机8在升降板11上沿第一方向即x方向的位置。无人机降落设备还包括第二调整组件43和第二调
整板44,第二调整组件43设置在箱体1上,第二调整板44连接在第二调整组件43上,在第二调整组件43的驱动下,第二调整板44向靠近无人机8的方向运动,以调整无人机8在升降板11上沿第二方向即y方向的位置。无人机8降落在升降板11上后,无人机8的位置由x方向和y方向的坐标构成,分别通过第一调整组件41和第二调整组件43对无人机8在x方向和y方向上的坐标进行调整校正,使其符合预期位置,而后固定装置5再动作对无人机8进行固定。
[0066]
在本实用新型的一些实施例中,如图2至图4所示,无人机8降落在升降板11上时,具有多个降落位置,为了快速进行无人机8位置的调整,分别从x方向的正负方向和y方向的正负方向进行调整。第一调整组件41设置有两组,两组第一调整组件41设置在箱体1相对的两侧,两组第一调整组件41分别对无人机8在x方向正负方向上的位置进行调整。两组第一调整组件41驱动各自的第一调整板42向靠近无人机8的方向运动,直至无人机8运动至预期位置,预期位置为升降板11在x方向上的中心位置。第二调整组件43设置有两组,两组第二调整组件43设置在箱体1另外相对的两侧,两组第二调整组件43和两组第一调整组件41形成了第一组第一调整组件41、第一组第二调整组件43、第二组第一调整组件41和第二组第二调整组件43的环形设置方式。两组第二调整组件43分别对无人机8在y方向正负方向上的位置进行调整,两组第二调整组件43驱动各自的第二调整板44向靠近无人机8的方向运动,直至无人机8运动至预期位置,预期位置为升降板11在y方向上的中心位置。
[0067]
在本实用新型的一些实施例中,如图2至图4所示,第一调整组件41包括第一驱动件411、第一传动件412和第二传动件413,由一个第一驱动件411同时带动两组传动件。第一驱动件411设置在箱体1上,第一传动件412连接在第一驱动件411上,第一传动件412与第一驱动件411直接连接,第二传动件413与第一驱动件411通过第一同步杆414实现动力传递,第一同步杆414的两端设置有联轴器,实现扭矩的传递。在第一同步杆414的作用下,第一传动件412和第二传动件413的输出相同,第一调整板42的两端分别与第一传动件412和第二传动件413连接,使得第一调整板42的两端的运动速度相同,避免出现倾斜的情况。
[0068]
其中,第一传动件412和第二传动件413采用皮带轮组合,也可以选用链轮组合或齿轮齿条组合。第一驱动件411与第一传动件412中的主动轮连接,通过主动轮将动力传递给第一传动件412中的皮带,皮带上固定设置有第一滑块415,第一调整板42连接在第一滑块415上。第一驱动件411通过第一同步杆414与第二传动件413中的主动轮连接,通过主动轮将动力传递给第二传动件413中的皮带,皮带上固定设置有第二滑块416,第一调整板42连接在第二滑块416上。两个滑块的同步运动即为第一调整板42的运动。第一驱动件411选用电机。
[0069]
在本实用新型的一些实施例中,如图2至图4所示,第二调整组件43包括第二驱动件431、第三传动件432和第四传动件433,由一个第二驱动件431同时带动两组传动件。第二驱动件431设置在箱体1上,第三传动件432连接在第二驱动件431上,第三传动件432与第二驱动件431直接连接,第四传动件433与第二驱动件431通过第二同步杆434实现动力传递,第二同步杆434的两端设置有联轴器,实现扭矩的传递。在第二同步杆434的作用下,第三传动件432和第四传动件433的输出相同,第二调整板44的两端分别与第三传动件432和第四传动件433连接,使得第二调整板44的两端的运动速度相同,避免出现倾斜的情况。
[0070]
其中,第三传动件432和第四传动件433采用皮带轮组合,也可以选用链轮组合或齿轮齿条组合。第二驱动件431与第三传动件432中的主动轮连接,通过主动轮将动力传递
给第三传动件432中的皮带,皮带上固定设置有第三滑块435,第二调整板44连接在第三滑块435上。第二驱动件431通过第二同步杆434与第四传动件433中的主动轮连接,通过主动轮将动力传递给第四传动件433中的皮带,皮带上固定设置有第四滑块436,第二调整板44连接在第四滑块436上。两个滑块的同步运动即为第二调整板44的运动。第二驱动件431选用电机。在初始状态时,第一调整组件41和第二调整组件43位于升降板11的外侧,当无人机8降落后,第一调整组件41和第二调整组件43开始运动。
[0071]
在本实用新型的一些实施例中,如图2、图3和图5所示,固定装置5包括固定架51、驱动组件和固定组件,固定架51连接在升降装置3上,驱动组件连接在固定架51上,固定组件连接在驱动组件上,驱动组件设置成用于驱动固定组件固定无人机8。
[0072]
在本实用新型的一些实施例中,如图2至图5所示,固定组件包括第一夹爪57和第二夹爪58,第一夹爪57连接在驱动组件上,驱动组件设置成用于驱动第一夹爪57直线运动,第二夹爪58转动连接在驱动组件上,驱动组件设置成用于第二夹爪58翻转,以使第一夹爪57和第二夹爪58固定无人机8。
[0073]
其中,驱动组件包括驱动电机52、第一丝杠53、第二丝杠54、第五滑块55和第六滑块56,第五滑块55连接在第一丝杠53上,第六滑块56连接在第二丝杠54上,第一丝杠53和第二丝杠54连接在驱动电机52上,且第一丝杠53和第二丝杠54的旋向相反。第一夹爪57固定在第五滑块55上,第二夹爪58转动连接在第六滑块56上。在驱动电机52的作用下,第一丝杠53和第二丝杠54向相反的方向旋转,使得第五滑块55和第六滑块56向靠近或向远离彼此的方向运动,进而实现第一夹爪57和第二夹爪58向靠近或向远离彼此的方向运动,第一夹爪57先固定无人机8的一侧,第二夹爪58翻转再固定无人机8的另一侧。在固定架51上还设置有第一限位槽511和第二限位槽512,第五滑块55在第一限位槽511内滑动,第六滑块56在第二限位槽512中滑动,第一限位槽511和第二限位槽512限制第五滑块55和第六滑块56的运动方向,即限制第一夹爪57和第二夹爪58的运动方向。
[0074]
在本实用新型的一些实施例中,如图2至图4所示,升降板11上设置有使第一夹爪57和第二夹爪58露出的条形槽,第一夹爪57和第二夹爪58在条形槽内运动进而实现对无人机8的固定。
[0075]
其中,第一夹爪57和第二夹爪58的数量均为两个,对无人机8进行固定时,第一夹爪57与无人机8之间形成两个固定点,第二夹爪58与无人机8之间形成两个固定点,提高固定装置5对无人机8的固定的可靠性。
[0076]
在本实用新型的一些实施例中,如图5所示,第一夹爪57和第二夹爪58的轮廓匹配无人机8的起落架的轮廓,第一夹爪57和第二夹爪58与无人机8接触的表面为弧形面,能够完全匹配无人机8的起落架的表面,增加固定的可靠性。
[0077]
在本实用新型的一些实施例中,如图1和图2所示,箱盖2包括第三驱动件21和卷帘门22,第三驱动件21设置在箱体1上,卷帘门22设置在箱体1上,且第三驱动件21与卷帘门22连接,第三驱动件21设置成用于驱动卷帘门22打开或收卷,以密封或打开箱体1。在第三驱动件21的作用下,卷帘门22单向打开以密封箱体1,卷帘门22仅单侧设置,减小占用空间,且卷帘门22收卷后的体积较小,进一步节省了空间。
[0078]
在本实用新型的一些实施例中,如图3和图4所示,升降装置3包括第四驱动件31、两个剪叉臂32和导轨33,剪叉臂32的一侧同时转动连接在箱体1和滑动连接在导轨33上,两
个剪叉臂32之间设置有连接杆,使得两个剪叉臂32能够同步运动。第四驱动件31可以为电机或气缸,在一个实施例中,为电机。升降装置3还包括第五传动件,第五传动件包括旋向相反的第三丝杠34和第四丝杠35、连接在第三丝杠34上的第七滑块36和连接在第四丝杠35上的第八滑块37。第三丝杠34和第四丝杠35连接在第四驱动件31上,剪叉臂32连接在第七滑块36和第八滑块37上,在第四驱动件31的作用下,剪叉臂32能够在长度方向上发生变化,进而实现升降板11的升降。
[0079]
其中,升降装置3的数量可为一组,也可为两组或多组,在一个实施例中,设置有两组。第四驱动件31为电机。
[0080]
在本实用新型的一些实施例中,如图4所示,无人机降落设备还包括设置在箱体1上的接近开关6,接近开关6设置成感应剪叉臂32靠近箱体1底部的一端。当接近开关6感应到剪叉臂32时说明升降板11已经到达预期位置。
[0081]
在本实用新型的一些实施例中,如图1所示,无人机降落设备还包括控制装置7,控制装置7设置在箱体1上,且箱盖2、升降装置3、固定装置5和调整装置4均与控制装置7电连接。
[0082]
下面说一下本实施例的无人机降落设备的工作流程:
[0083]
第三驱动件21驱动卷帘门22打开;
[0084]
无人机8降落到升降板11上;
[0085]
调整装置4对无人机8在x方向和y方向上的位置进行调整校正直至无人机8与预期位置重合;
[0086]
固定装置5动作固定无人机8的起落架;
[0087]
固定完成后,调整装置4恢复至初始位置;
[0088]
升降装置3驱动升降板11下降;
[0089]
第三驱动件21驱动卷帘门22密封箱体1。
[0090]
本实用新型的另一实施例提出了一种巡检车辆,包括上述任意实施例中的无人机降落设备,无人机降落设备设置在巡检车辆的顶部。
[0091]
根据本实用新型实施例的巡检车辆与上述无人机降落设备具有相同的优势,在此不再赘述。另外,巡检车辆的状态可以为停止状态和驾驶状态,通过无人机8的自动定位功能能够实现无人机8的动态跟随降落。
[0092]
以上,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips