
 商标分类
商标分类  商标转让
商标转让 
冗余系统推进装置以及电动航空机的制作方法
 2021-02-13 02:02:00|
2021-02-13 02:02:00| 372|
372| 起点商标网
起点商标网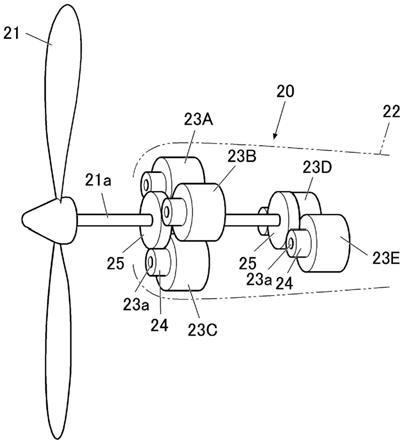
[0001]
本发明涉及一种利用多个电动马达来驱动螺旋桨的冗余系统推进装置以及具备该装置的电动航空机。
背景技术:
[0002]
在通过由电动马达驱动的螺旋桨来获得推进力的电动航空机中,容易进行电动马达的复数化。
[0003]
因此,能够比较容易地构成将驱动螺旋桨的电动马达设为多个而具有冗余性的推进装置(以下,称为冗余系统推进装置)。
[0004]
作为使电动马达复数化的方法,例如如专利文献1、专利文献2所述,已知有将多个电动马达绕输出轴沿周向并列地配置的方法(以下称为径向配置)。
[0005]
另外,也有将多个电动马达串联地并列配置的方法(以下,称为轴向配置)。
[0006]
现有技术文献
[0007]
专利文献
[0008]
专利文献1:日本特开2010-41747号公报
[0009]
专利文献2:日本特开2007-325479号公报
技术实现要素:
[0010]
技术问题
[0011]
然而,例如,若将上述径向配置适用于电动航空机的冗余系统推进装置中的多个电动马达的配置,例如如图10所示,则成为多个电动马达102以螺旋桨100的螺旋桨轴101为中心而配置的状态。
[0012]
而且,在如此地将多个电动马达102设为径向配置的情况下,若以使分别安装在各电动马达102的输出轴的第一齿轮104与安装在螺旋桨轴101的延伸方向上的一个位置的第二齿轮105啮合的方式将多个电动马达102设为径向配置,则必须使许多电动马达102绕螺旋桨轴101配置,多个电动马达102的外切圆的直径变大。
[0013]
因此,虽然收容这些电动马达102等的吊舱103的尺寸变大,但是若吊舱103的尺寸变大,则与此对应地,导致吊舱103引起的空气阻力变大,并导致对电动航空机的阻力增大。
[0014]
另一方面,若将上述轴向配置适用于电动航空机的冗余系统推进装置中的多个电动马达的配置,如图11所示,则导致后侧(即,远离螺旋桨100的一侧)的电动马达102正面地受到随着由螺旋桨100的旋转而产生的空气流而流动的前侧(即,靠近螺旋桨100的一侧)的电动马达102的热量,因此后侧的电动马达102的冷却效率降低。
[0015]
因此,在后侧的电动马达102中,有可能驱动性能降低,或根据情况而烧坏。
[0016]
本发明是鉴于上述问题而做出的,其目的在于,提供能够在不使吊舱尺寸增大的情况下,适当地冷却多个电动马达的冗余系统推进装置和具备该装置的电动航空机。
[0017]
技术方案
[0018]
为了解决所述问题,第一方式的发明是一种冗余系统推进装置,其特征在于,
[0019]
所述冗余系统推进装置具备螺旋桨、以及驱动所述螺旋桨的多个电动马达,
[0020]
所述多个电动马达相对于所述螺旋桨的螺旋桨轴,在其延伸方向上的多个位置,至少各一个地配置在所述螺旋桨轴的周围,
[0021]
并且,在从所述螺旋桨侧向沿着所述螺旋桨轴的方向观察的情况下,所述多个电动马达分别配置在所述多个电动马达的各输出轴与其他所述电动马达的所述输出轴中的任一个都不重叠的位置。
[0022]
第二方式的发明是一种冗余系统推进装置,其特征在于,
[0023]
所述冗余系统推进装置具备螺旋桨、以及驱动所述螺旋桨的多个电动马达,
[0024]
所述多个电动马达相对于所述螺旋桨的螺旋桨轴配置在其延伸方向上的多个位置,在所述多个位置中的一个位置,一个所述电动马达与所述螺旋桨的螺旋桨轴直接地连结,在其他位置,至少一个所述电动马达配置在所述螺旋桨轴的周围,
[0025]
并且,在从所述螺旋桨侧向沿着所述螺旋桨轴的方向观察的情况下,所述多个电动马达分别配置在所述多个电动马达的各输出轴与其他所述电动马达的所述输出轴中的任一个都不重叠的位置。
[0026]
第三方式的发明在第一方式或第二方式所述的冗余系统推进装置的基础上,其特征在于,所述多个位置为两个位置。
[0027]
第四方式的发明在第三方式所述的冗余系统推进装置的基础上,其特征在于,靠近所述螺旋桨的一侧的所述电动马达的数量为远离所述螺旋桨的一侧的所述电动马达的数量以上。
[0028]
第五方式的发明在第一方式或第二方式所述的冗余系统推进装置的基础上,其特征在于,
[0029]
所述多个位置为三个位置以上,
[0030]
所述冗余系统推进装置被配置为越靠近所述螺旋桨,所述电动马达的数量越多。
[0031]
第六方式的发明在第二方式所述的冗余系统推进装置的基础上,其特征在于,
[0032]
所述多个位置为两个位置以上,
[0033]
在从所述螺旋桨侧向沿着所述螺旋桨轴的方向观察的情况下,离所述螺旋桨最远的一侧的所述电动马达被设为与所述螺旋桨的螺旋桨轴直接连结的一个所述电动马达。
[0034]
第七方式的发明在第一方式至第六方式中任一方式所述的冗余系统推进装置的基础上,其特征在于,
[0035]
所述多个电动马达被收容在吊舱内,
[0036]
在所述吊舱内设置有用于将从空气进入口流入的空气分别导向所述各电动马达的导风板。
[0037]
第八方式的发明是一种电动航空机,其特征在于,
[0038]
所述电动航空机具备第一方式至第七方式中任一方式所述的冗余系统推进装置。
[0039]
发明效果
[0040]
根据本发明,在冗余系统推进装置和具备该装置的电动航空机中,能够在不使吊舱的尺寸增加的情况下,适当地冷却多个电动马达。
附图说明
[0041]
图1是示出电动航空机的一例的外观立体图。
[0042]
图2a是示出本实施方式的冗余系统推进装置的结构例的立体图,图2b是示出本实施方式的冗余系统推进装置的结构例的主视图。
[0043]
图3的(a)是示出本实施例的冗余系统推进装置的其他结构例的立体图,图3的(b)是示出本实施方式的冗余系统推进装置的结构例的主视图。
[0044]
图4的(a)是示出本实施例的冗余系统推进装置的其他结构例的立体图,图4的(b)是示出本实施方式的冗余系统推进装置的其他结构例的主视图。
[0045]
图5的(a)是示出本实施例的冗余系统推进装置的其他结构例的立体图,图5的(b)是示出本实施方式的冗余系统推进装置的其他结构例的主视图。
[0046]
图6的(a)是示出本实施方式的冗余系统推进装置的其他结构例的立体图,图6的(b)是示出本实施方式的冗余系统推进装置的其他结构例的主视图。
[0047]
图7是示出设置在冗余系统推进装置的吊舱的空气进入口或导风板的结构例的主视图。
[0048]
图8是示出本实施方式的冗余系统推进装置的其他结构例的立体图。
[0049]
图9的(a)、图9的(b)是用于说明导风板的弯曲的程度的图。
[0050]
图10是示出以螺旋桨轴为中心径向配置了多个电动马达的状态的图。
[0051]
图11是示出沿螺旋桨轴而轴向配置了多个电动马达的状态的图。
[0052]
符号说明
[0053]
10
ꢀꢀ
电动航空机
[0054]
20
ꢀꢀ
冗余系统推进装置
[0055]
21
ꢀꢀ
螺旋桨
[0056]
21a 螺旋桨轴
[0057]
22
ꢀꢀ
吊舱
[0058]
22a 空气进入口
[0059]
22b 导风板
[0060]
23
ꢀꢀ
电动马达
[0061]
23a 输出轴
具体实施方式
[0062]
以下,参照附图,对本发明的冗余系统推进装置以及电动航空机的实施方式进行说明。
[0063]
应予说明,以下将电动航空机的机头侧作为前侧,将机尾侧作为后侧而进行说明。
[0064]
图1是示出电动航空机的一例的外观立体图。
[0065]
电动航空机10构成为,在机翼11安装有具备螺旋桨21、吊舱22、以及后述的多个电动马达23等的冗余系统推进装置20,并且利用多个电动马达23驱动螺旋桨21来获得推进力。应予说明,虽然在图1中示出了冗余系统推进装置20安装在固定机翼上的情况,但是不限于此,例如,冗余系统推进装置20可以安装在折叠机翼等上,也可以安装在倾斜翼等可动的机翼上。另外,电动航空机10可以是无人机。
[0066]
图2a和2b是示出本实施方式的冗余系统推进装置的结构例的图,图2a是立体图,图2b是主视图。
[0067]
在本实施方式的冗余系统推进装置20中,用于驱动螺旋桨21的电动马达23的配置被设为冗余系统的马达配置,通过多个电动马达23a~23e来驱动螺旋桨21。
[0068]
具体地,在该结构例中,在冗余系统推进装置20的吊舱22内的前侧配置有三个电动马达23a~23c,在后侧配置有两个电动马达23d、23e。并且,各电动马达23以使安装于各电动马达23的输出轴23a的第一齿轮24与分别固定于螺旋桨轴21a的前侧和后侧的第二齿轮25啮合的方式配置。
[0069]
由此,在该结构例中,多个电动马达23相对于螺旋桨21的螺旋桨轴21a,在其延伸方向(即,前后方向)上的多个位置,各多个地配置在螺旋桨轴21a周围。
[0070]
另外,代替如上述结构例那样地在螺旋桨21的螺旋桨轴21a的延伸方向上的多个位置各多个地配置有多个电动马达23,例如如图3的(a)所示,虽然将多个电动马达23相对于螺旋桨21的螺旋桨轴21a而配置在该延伸方向上的多个位置,但是也能够构成为,以与固定于某位置的第二齿轮25啮合的方式将各电动马达23仅设为一个(在图3的(a)中,为电动马达23d)。
[0071]
应予说明,虽然在图3的(a)中示出了电动马达23为四个的情况,但是在除四个以外的情况下也是同样的。另外,虽然在图3的(a)中示出了在螺旋桨轴21a的延伸方向上的多个位置中的一个位置配置有一个电动马达23的情况,但是也能够构成为在多个位置分别配置一个电动马达23。
[0072]
由此,在本实施方式的冗余系统推进装置20中,多个电动马达23相对于螺旋桨21的螺旋桨轴21a,在其延伸方向(即,前后方向)上的多个位置,至少各一个地配置在螺旋桨轴21a周围。
[0073]
并且,各电动马达23由未图示的各控制器分别驱动,通过驱动各电动马达23而使螺旋桨轴21a旋转,从而使螺旋桨21绕螺旋桨轴21a旋转驱动。
[0074]
另外,如图2b和图3的(b)所示,在本实施方式的冗余系统推进装置20中,在从螺旋桨21侧向沿着螺旋桨轴21a的方向观察的情况下(即从前侧观察后方的情况下),多个电动马达23分别配置在多个电动马达23的各输出轴23a与其他电动马达23的输出轴23a中的任一个都不重叠的位置。
[0075]
接下来,对本实施方式的冗余系统推进装置20和具备该装置的电动航空机10的作用效果进行说明。应予说明,虽然以下对图2a、图2b所示的结构例进行说明,但是也对如图3的(a)、图3的(b)所示那样的结构例同样地进行说明。
[0076]
例如,在图2a所示的构成例中,三个电动马达23和两个电动马达23分别前后地分散而径向配置。并且,在径向配置三个(或两个)电动马达23的情况下,与如图10所示那样地在螺旋桨轴101的延伸方向上的一个位置径向配置五个电动马达102的情况相比,即使使第二齿轮25的直径变小,各电动马达23也不相互干扰,因此能够减小第二齿轮25的直径。
[0077]
因此,由于能够使绕第二齿轮25配置的三个(或两个)电动马达23的外切圆的直径变小,所以能够将收容这些电动马达23等的吊舱22的尺寸抑制得很小。
[0078]
由此,在本实施方式的冗余系统推进装置20和电动航空机10中,能够防止收容电动马达23等的吊舱22的尺寸增大。
[0079]
另外,在本实施方式的冗余系统推进装置20和电动航空机10中,如上所述,在从螺旋桨21侧向沿着螺旋桨轴21a的方向观察的情况下,冗余系统推进装置20的多个电动马达23分别配置在这些各输出轴23a与其他电动马达23的输出轴23a中的任一个都不重叠的位置。
[0080]
因此,即使前侧的电动马达23的热量随着由螺旋桨21的旋转产生的空气流而向后方流动,后侧的电动马达23也不会正面地承受该热量。
[0081]
即,后侧的电动马达23处于不承受前侧的电动马达23的热量,或者即使承受热量也仅承受一部分热量的状态。
[0082]
因此,通过由螺旋桨21的旋转而产生的空气流,不仅能够充分地冷却前侧的电动马达23,也能够充分冷却后侧的电动马达23,能够适当地冷却多个电动马达23。
[0083]
如上所述,根据本发明的冗余系统推进装置20和具备该装置的电动航空机10,能够在不使吊舱22的尺寸增大的情况下,通过由螺旋桨21的旋转产生的空气流而适当地冷却驱动螺旋桨21的多个电动马达23。
[0084]
因此,在能够充分地冷却各电动马达23的同时能够将吊舱22所引起的空气阻力抑制得更小,因此能够准确地防止对电动航空机10的阻力增大。
[0085]
应予说明,在图2a、图2b所示的结构例中,对冗余系统推进装置20具备五个电动马达23的情况进行了说明,并且在图3的(a)和图3的(b)所示的结构例中,对冗余系统推进装置20具备四个电动马达23的情况进行了说明,但是冗余系统推进装置20中的电动马达23的最适当的个数能够通过例如以下方式而求出。
[0086]
即,在将短时额定下的马达输出相对于电动马达23的连续额定下的马达输出的比设为a时,通过1/(a-1)来求出短时额定时的电动马达23的个数。
[0087]
并且,通过在其上加上故障而停止的电动马达23的个数1,从而能够求出冗余系统推进装置20中的电动马达23的最适当的个数。应予说明,在将故障的电动马达23的个数允许到两个的情况下,在1/(a-1)上加2。
[0088]
例如,若上述比a为1.25,则成为1/(a-1)=4,在将故障而停止的电动马达23的个数设为1的情况下,冗余系统推进装置20中的电动马达23的最适当的个数为4+1=5。
[0089]
由此,冗余系统推进装置20中的电动马达23的个数能够通过用于冗余系统推进装置20的、短时额定下的马达输出相对于电动马达23的连续额定下的马达输出的比a等来确定。
[0090]
因此,虽然冗余系统推进装置20中的电动马达23的个数也有根据电动马达23的性能即上述比a等而成为图2a、图2b所示的五个或图3的(a)、图3的(b)所示的四个的情况,但也可以是除四个或五个以外的个数。
[0091]
并且,例如如图4的(a)、图4的(b)所示,在冗余系统推进装置20中的电动马达23的个数为六个的情况下,也能够将多个电动马达23a~23f相对于螺旋桨21的螺旋桨轴21a,在其延伸方向上的多个位置各多个地配置在螺旋桨轴21a的周围,并且,在从螺旋桨21侧向沿着螺旋桨轴21a的方向观察的情况下,也能够将多个电动马达23a~23f分别配置在多个电动马达23的各输出轴23a与其他电动马达23的输出轴23a中的任一个都不重叠的位置。
[0092]
因此,在这种情况下,也与图2a、图2b、图3的(a)以及图3的(b)所示的各结构例的情况同样地,能够在不使吊舱22的尺寸增大的情况下,适当地冷却驱动螺旋桨21的多个电
动马达23。
[0093]
另外,即使在如上所述那样地冗余系统推进装置20中的电动马达23的个数是例如四个的情况下,例如如图5的(a)、图5的(b)所示,也能够将多个电动马达23a~23d相对于螺旋桨21的螺旋桨轴21a,在其延伸方向上的多个位置各多个地配置在螺旋桨轴21a的周围,并且,在从螺旋桨21侧向沿着螺旋桨轴21a的方向观察的情况下,能够将多个电动马达23a~23d分别配置在多个电动马达23的各输出轴23a与其他电动马达23的输出轴23a中的任一个都不重叠的位置。
[0094]
因此,在这种情况下,也与上述情况相同地,能够在不使吊舱22的尺寸增大的情况下,适当地冷却驱动螺旋桨21的多个电动马达23。
[0095]
另一方面,在冗余系统推进装置20中的电动马达23的个数是例如四个的情况下,例如,如图6的(a)、图6的(b)所示,也能够构成为,将后侧的电动马达23d设为一个等,仅在螺旋桨轴21a的延伸方向上的多个位置中的一个位置上,经由接头26等而将一个电动马达23d的输出轴23a与螺旋桨轴21a直接地(即,不经由第一齿轮24或第二齿轮24)连结。
[0096]
即使如此配置,在从螺旋桨21侧向沿着螺旋桨轴21a的方向观察的情况下,由于电动马达23d的输出轴23a与其他电动马达23a~23c的各输出轴23a中的任一个都不重叠,因此与上述各情况相同地,在冗余系统推进装置20中,也能够在不使吊舱22的尺寸增大的情况下,适当地冷却驱动螺旋桨21的多个电动马达23。
[0097]
应予说明,虽然在图6的(a)、图6的(b)中示出了电动马达23为四个的情况,但是在除四个以外的情况下也是相同的。
[0098]
另外,虽然在图2a、图2b、图3的(a)、图3的(b)、图6的(a)、图6的(b)中示出了配置在冗余系统推进装置20的吊舱22内的前侧的电动马达23的个数比配置在后侧的电动马达23的个数多的情况,但也能够构成为后侧的电动马达23的个数比前侧的电动马达23的个数多。
[0099]
另外,在上述实施方式中,对由螺旋桨21的旋转而产生的空气流流入到吊舱22内而向多个电动马达23送风的情况进行了说明。
[0100]
但是,例如,也能够构成为,在收容上述多个电动马达23的吊舱22内设置用于将从空气进入口流入的空气分别导向各电动马达23的导风板。
[0101]
以下,对设置于冗余系统推进装置20的吊舱22内的导风板等进行具体说明。
[0102]
应予说明,以下,将冗余系统推进装置20的多个电动马达23设为如图2a和图2b所示地配置的情况而进行说明,但是对以其他方式配置电动马达23的情况也同样地进行说明。
[0103]
如图7所示,在冗余系统推进装置20的吊舱22的前表面部分设置有用于将由螺旋桨21的旋转而产生的空气流吸入到吊舱22内的空气进入口22a。
[0104]
另外,在吊舱22内设置有用于将从空气进入口22a流入的空气分别导向各电动马达23a~23e的导风板22b。
[0105]
并且,利用导风板22b,将从图中左侧的空气进入口22a的上侧吸入的空气导向电动马达23a,并将从图中左侧的空气进入口22a的下侧吸入的空气导向电动马达23d。
[0106]
同样地,利用导风板22b,将从图中右侧的空气进入口22a的上侧吸入的空气导向电动马达23b,并将从图中右侧的空气进入口22a的下侧吸入的空气导向电动马达23e。
[0107]
另外,利用导风板22b,将从图中下侧的空气进入口22a吸入的空气导向电动马达23c。
[0108]
由此,通过构成为利用导风板22b将从空气进入口22a流入的空气分别导向各电动马达23a~23e,从而能够可靠地冷却各电动马达23a~23e。
[0109]
并且,在冗余系统推进装置20的吊舱22内设置有导风板22b的情况下,例如如图9的(a)所示,在从前侧向后方观察的情况下,若前后的电动马达23α、23β配置在彼此的输出轴23a重合的位置,则为了使后侧的电动马达23β不承受前侧的电动马达23α的热量,必须使导风板22b大幅度弯曲。
[0110]
但是,若如此地构成,则因大幅度地弯曲的导风板22b而有可能使空气在吊舱22内难以顺畅地流动,并且吊舱22内的空气阻力增大而有可能使对电动航空机10的阻力增大。
[0111]
对此,如图9的(b)所示的本实施方式那样,在从前侧观察后方的情况下,若前后的电动马达23α、23β配置在彼此的输出轴23a不重叠的位置,则即使没有使导风板22b那么大地弯曲,也能够形成后侧的电动马达23β不承受前侧的电动马达23α的热量的状态。
[0112]
因此,在本实施例中,由于空气沿导风板22b在吊舱22内顺畅地流动,所以吊舱22内的空气阻力变小。因此,可以准确地防止对电动航空机10的阻力增大。
[0113]
当然,本发明不限于上述实施方式等,只要不脱离本发明的主旨,就可以适当地进行变更。
[0114]
例如,在上述实施方式中,虽然对冗余系统推进装置20安装于电动航空机10的机翼11的情况进行了说明(参照图1),但是冗余系统推进装置20也可以配置在电动航空机10的机头等。
[0115]
另外,例如,在上述实施方式中,对在从螺旋桨21侧向沿着螺旋桨轴21a的方向观察的情况下,多个电动马达23分别配置在靠近螺旋桨21的一侧(即前侧)和远离螺旋桨21的一侧(即后侧)这两个位置的情况进行了说明,但也可以分别配置在三个位置以上。
[0116]
此时,例如如图8所示,在螺旋桨21的螺旋桨轴21a的延伸方向上的三个位置以上配置有多个电动马达23,并且也能够以越接近螺旋桨21,电动马达23的数量越多的方式配置。
[0117]
应予说明,虽然在图8中示出了三个位置的情况,但也可以是四个位置以上。
[0118]
另外,在图8中,虽然示出了离螺旋桨21最远的一侧的电动马达23被设为与螺旋桨21的螺旋桨轴21a直接地(即,不经由第一齿轮24或第二齿轮25)连结的一个电动马达23的情况,但是也能够构成为,例如如图3的(b)所示的后侧的电动马达23d那样,经由第一齿轮24和第二齿轮25将该电动马达23安装于螺旋桨轴21a。
[0119]
此外,也可以构成为,在将多个电动马达23配置在螺旋桨轴21a的延伸方向上的三个位置的情况下,也使后侧的电动马达23的数量比前侧的电动马达23的数量多。
[0120]
此外,例如,虽然省略图示,但是可以构成为,在图2a、图2b等中,在电动马达23的输出轴23a安装有第一齿轮24时,或者如图6的(a)、图6的(b)所示那样在螺旋桨轴21a安装有电动马达23的输出轴23a时,经由单向离合器进行安装。
[0121]
若如此构成,则在驱动电动马达23而使螺旋桨21旋转驱动时,电动马达23的输出被可靠地从输出轴23a向第一齿轮24和螺旋桨轴21a传递,但是在电动马达23故障等而停止时,第一齿轮24和/或螺旋桨轴21a相对于电动马达23的输出轴23a而成为空转的状态。
[0122]
若第一齿轮24和螺旋桨轴21a固定在电动马达23的输出轴23a,则电动马达23故障等而停止且不旋转的输出轴23a有可能阻碍第一齿轮24和螺旋桨轴21a的旋转,并且有可能使各电动马达23的驱动效率降低,但是若设置有单向离合器,则即使电动马达23故障等而停止从而使输出轴23a不旋转,也通过空转,从而不阻碍第一齿轮24和螺旋桨轴21a的旋转。
[0123]
因此,即使多个电动马达23中的一个(或两个等)电动马达23故障等而停止,也能够准确地防止由此而导致各电动马达23的驱动效率降低。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips