
 商标分类
商标分类  商标转让
商标转让 
一种电驱动舰载直升机快速固定及横移系统的制作方法
 2021-02-13 02:02:41|
2021-02-13 02:02:41| 226|
226| 起点商标网
起点商标网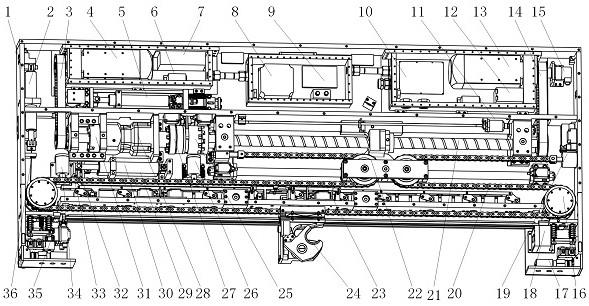
[0001]
本发明涉及舰载直升机技术领域,尤其是一种电驱动舰载直升机快速固定及横移系统。
背景技术:
[0002]
舰载直升机或无人机需要在恶劣环境下执行任务,尤其是高海况条件下,对舰载直升机操作人员和甲板辅助人员的安全有重大影响,因此研究自动控制并能在指定环境下安全升降、系留和校直的系统是必须的。目前主要应用的有以下三种:1.鱼叉格栅系统。鱼叉格栅系统主要由安装在舰载直升机腹部的鱼叉装置和安装在舰船甲板的格栅装置两部分组成。舰载直升机着舰时,需要将鱼叉对准插入栅格内,由栅格装置完成对其的固定、系留任务。受到鱼叉及甲板栅格结构及材料限制,该系统只能适用于轻型直升机,目前多用于执行对5吨以下直升机的系留任务,且该系统不具备直升机转运功能。
[0003]
2.e系统。e系统工作原理如下:舰载直升机着舰时,首先向舰船放下绳索,由舰面辅助人员将绳索固定在舰面装置上;舰载直升机依靠绳索拉力与舰船保持同步状态,同时舰载直升机回收绳索,将自身拉向舰船甲板,直至完成着舰工作。该系统操作繁琐,操作时间长,且在进行过程中容易出现危险,并不能适用于较高海况。
[0004]
3.rast系统。rast系统工作原理如下:舰载直升机着舰时,同样在舰船上方悬停并向舰船放下绳索,但与e系统不同的是,该绳索用于从舰船向直升机传送拉降索,直升机工作人员将拉降索与直升机固定;同时甲板绞车装置开始将直升机拉向舰船,直至完成着舰工作;直升机着舰后,通过舰船甲板上的固定装置固定直升机腹部探杆,完成系留工作,同时松开拉降索,由位于甲板下的牵引系统将直升机转运至机库内。但是由于其系统的复杂性、及牵引轨道的过重,多用于大中型驱逐舰,难以在小型护卫舰船上得到广泛应用。
[0005]
以上三种舰载直升机辅助系统虽然实现了相应的功能但均具有传动复杂、传动效率低、噪声大、可靠性低等缺点。
技术实现要素:
[0006]
本发明需要解决的技术问题是提供一种电驱动舰载直升机快速固定及横移系统,用以解决在满足性能要求下,动力系统电气化的问题。
[0007]
为解决上述技术问题,本发明所采用的技术方案是:一种电驱动舰载直升机快速固定及横移系统,所述系统包括对内部起到保护作用的盒状壳体、使系统能够自动控制的控制系统、用于传递动力实现机械爪移动的主传动系统和用于机械爪的锁止和解锁的内部执行机构;所述壳体容纳并支撑控制系统、主传动系统和内部执行机构;所述控制系统是具有防爆特性的四周由钢板组成的封闭空间。
[0008]
本发明技术方案的进一步改进在于:所述控制系统包括2个固态继电器、低速端开关电源、变频器、继电器模块、控制电路板、磁致伸缩传感器、高速端开关电源、编码器、光电
开关和激光测距仪。
[0009]
本发明技术方案的进一步改进在于:所述主传动系统包括用于将旋转运动转换为直线运动并平行传递动力的同步带-滚珠丝杠传动、实现减速比和增大扭矩并平行传递动力的同步带-减速机传动和用于增加自由端行程和额定负载的滑轮组传动。
[0010]
本发明技术方案的进一步改进在于:所述同步带-滚珠丝杠传动包括安装在高速端电动机与滚珠丝杠之间的高速端同步带传动机构、高速端电动机、滚珠丝杠和动滑轮小车;高速端电动机和滚珠丝杠配有基座与壳体通过螺栓连接。
[0011]
本发明技术方案的进一步改进在于:所述同步带-减速机传动主要包括低速端同步带传动机构、低速端电动机、制动器和减速机;低速端电动机、制动器和减速机配有基座配通过螺栓与壳体连接。
[0012]
本发明技术方案的进一步改进在于:所述制动器、减速机、滚珠丝杠和动滑轮小车依次按顺序同轴线的安装在壳体内。
[0013]
本发明技术方案的进一步改进在于:所述滑轮组传动包括两侧配有导轨的动滑轮小车、2个底部设有法兰盘直接与壳体螺栓连接的定滑轮、安装在壳体内壁上的链条断裂检测机构、链条和机械爪组;所述动滑轮小车、2个定滑轮、机械爪组和链条组成滑轮组,使得自由端机械爪行程更长,承载更大;链条断裂检测机构安装在链条与壳体的机架之间;与链条断裂检测机构相对的链条的一段配有基座与壳体通过螺栓连接;动滑轮小车里安装两个动滑轮。
[0014]
本发明技术方案的进一步改进在于:所述内部执行机构包括用于动力的接入与切断的离合驱动模块、能够捕获和释放探杆的机械爪启闭模块和用于紧急断电及其他故障时锁住机械爪的锁止及解锁机构模块;所述离合驱动模块安装在减速机与电动机之间;所述机械爪启闭模块安装在壳体开口处。
[0015]
本发明技术方案的进一步改进在于:所述离合驱动模块包括离合驱动单元、离合器和联轴器;所述离合器模块安装在减速机与电动机之间,联轴器和离合器安装在与减速机同一轴线上;所述机械爪启闭模块包括机械爪解锁电动推杆、机械爪组、解锁拉杆复位机构和传动拉线;所述锁止及解锁机构模块包括安装在滑轮组和机械爪启闭模块之间的锁止机构、中位锁解锁保持机构、中位锁解锁电动推杆、紧急锁解锁电动推杆、中位锁拉杆、紧急锁拉杆和紧急锁解锁保持机构。
[0016]
本发明技术方案的进一步改进在于:所述离合驱动单元包括离合解锁电磁铁、离合推杆和离合拨叉。
[0017]
由于采用了上述技术方案,本发明取得的技术进步是:1、本发明适用于多种舰载直升机型,能够在4级以上甚至6级恶劣情况下使用,提高了舰载直升机使用适应性。
[0018]
2、本发明对舰载直升机的捕获、释放、校直和快速系留自动控制,无需其他人力物力,有较高的执行效率。
[0019]
3、本发明与现有技术相比,使用电动机作为动力,实现了动力系统电气化。
[0020]
4、本发明具有传动简单、传动效率高、噪声小、可靠性高等优点。
附图说明
[0021]
图1是本发明整体结构示意图;图2是本发明同步带-减速机传动示意图;图3是本发明离合驱动示意图;图4是本发明同步带-滚珠丝杠传动示意图;图5是本发明滑轮组传动示意图;图6是本发明锁止及解锁机构示意图。
[0022]
其中,1、壳体,2、机械爪解锁电动推杆,3、低速端同步带传动机构,4、低速端电动机,5、离合驱动单元,5-1、离合解锁电磁铁,5-2、离合推杆,5-3、离合拨叉,6、固态继电器,7、低速端开关电源,8、变频器,9、继电器模块,10、控制电路板,11、磁致伸缩传感器,12、高速端开关电源,13、高速端电动机,14、高速端同步带传动机构,15、编码器,16、定滑轮,17、光电开关,18、激光测距仪,19、链条断裂检测机构,20、链条,21、滚珠丝杠,22、动滑轮小车,23、锁止机构,24、机械爪组,25、离合器,26、中位锁解锁保持机构,27、联轴器,28、减速机,29、中位锁解锁电动推杆,30、紧急锁解锁电动推杆,31、制动器,32、中位锁拉杆,33、紧急锁拉杆,34、紧急锁解锁保持机构,35、解锁拉杆复位机构,36、传动拉线。
具体实施方式
[0023]
本发明是针对现有三种舰载直升机辅助系统虽然实现了相应的功能但均具有传动复杂、传动效率低、噪声大、可靠性低等缺点而研发的一种在满足性能要求的前提下,采用电驱动的舰载直升机快速固定及横移系统。
[0024]
下面结合附图对本发明做进一步详细说明:如图1所示,一种电驱动舰载直升机快速固定及横移系统,该系统包括壳体1、控制系统、主传动系统和内部执行机构;所述壳体1呈现盒状,容纳并支撑控制系统、主传动系统和内部执行机构,同时对内部起到保护作用;所述控制系统使本系统能够自动控制,同时四周由钢板组成封闭空间,具有防爆特性;所述主传动系统用于传递动力实现机械爪的移动;所述内部执行机构用于机械爪的锁止和解锁。
[0025]
控制系统包括:2个固态继电器6、低速端开关电源7、变频器8、继电器模块9、控制电路板10、磁致伸缩传感器11、高速端开关电源12、编码器15、光电开关17和激光测距仪18;主传动系统包括:同步带-减速机传动、同步带-滚珠丝杠传动和滑轮组传动;同步带-减速机传动包括:低速端同步带传动机构3、低速端电动机4、制动器31和减速机28;同步带-滚珠丝杠传动包括:高速端同步带传动机构14、高速端电动机13、滚珠丝杠21和动滑轮小车22;滑轮组传动包括:动滑轮小车22、2个定滑轮16、链条断裂检测机构19、链条20和机械爪组24;内部传动机构包括:离合驱动模块、机械爪启闭模块和锁止及解锁机构模块;离合驱动模块包括:离合驱动单元5、离合解锁电磁铁5-1、离合推杆5-2、离合拨叉5-3、离合器25和联轴器27;机械爪启闭模块包括:机械爪解锁电动推杆2、机械爪组24、解锁拉杆复位机构35和传动拉线36;锁止及解锁机构模块包括:锁止机构23、中位锁解锁保持机构26、中位锁解锁电动推杆29、紧急锁解锁电动推杆30、中位锁拉杆32、紧急锁拉杆33和紧急锁解锁保持机构
34。
[0026]
如图2所示的同步带-减速机传动,采用制动器31前置的传动方案;传动时,控制系统对低速端电动机4发出运行指令,电机输出轴带动低速端同步带传动机构3运行,随后传动到与低速端电动机4平行放置的减速机28,前置的制动器31为失电制动器,当本系统因事故断电后,自动制动,使得减速机28快速停止运行;同时低速端电动机4、制动器31和减速机28配有基座与壳体1通过螺栓连接,保证传动的平稳运行,实现减速比、增大扭矩和平行传递动力。
[0027]
如图3所示的离合驱动,动力的接入与断开通过离合拨叉5-3来控制;离合驱动模块运行时,离合解锁电磁铁5-1运行,带动其下方紧挨的弹簧运动,弹簧的压缩/复位控制着离合推杆5-2的挂钩,随后离合推杆5-2右/左运动,同时与离合推杆5-2通过螺栓连接的离合拨叉5-3运动,因此离合器接入或断开动力传递,离合解锁电磁铁5-1和离合推杆5-2配有基座与壳体1通过螺栓连接,使得传动平稳运行。
[0028]
如图4所示的同步带-滚珠丝杠传动,用于将旋转运动转换为直线运动,平行传递动力;采用高速端同步带传动机构14,使得电动机与滚珠丝杠21平行安装,采用滚珠丝杠传动,使旋转运动转换为直线运动;传动时,控制系统对高速端电动机13发出运行指令,电机输出轴带动高速端同步带传动机构14运行,随后与高速端电动机13平行放置的滚珠丝杠21旋转,与滚珠丝杠21配合的动滑轮小车22直线运动;同时高速端电动机13和滚珠丝杠21配有基座与壳体1通过螺栓连接,使得传动平稳运行,动滑轮小车22两侧配有导轨,使得小车运动平稳。所述高速端同步带传动机构安装在电动机与滚珠丝杠之间,使得电动机与滚珠丝杠传动平行放置,同时使得空间利用紧凑。
[0029]
如图5所示的滑轮组传动,用于增加自由端行程和额定负载;采用链条20传动,使得可应用于重载条件下,采用滑轮组,使得自由端机械爪组24行程长、负载大,配有链条断裂检测机构19,使得本系统能够在链条20断裂的情况下快速停止运行,保证安全;传动时,动滑轮小车22直线运动,在小车里安装的两个动滑轮随之旋转运动,随后链条20带定滑轮16旋转,机械爪组24直线运动;链条断裂检测机构19安装在壳体1内壁上,与链条断裂检测机构19相对的链条20的一段配有基座,与壳体1通过螺栓连接,两个定滑轮16的底部设有法兰盘直接与壳体螺栓连接。
[0030]
如图6所示的锁止及解锁机构,采用电磁铁和连杆机构控制紧急锁和中位锁的伸出与解锁;本发明正常运行时,中位锁解锁保持机构26、紧急锁解锁保持机构34内部电磁铁处于带电状态,中位锁解锁电动推杆29和紧急锁解锁电动推杆30通过中位锁拉杆32、紧急锁拉杆33控制锁止机构23中的中位锁、紧急锁处于解锁状态,出现紧急事故时,电磁铁失电,通过连杆控制锁止机构23使得中位锁和紧急锁伸出,将机械爪锁止;用于紧急断电及其他故障时,锁住机械爪,解决故障后解锁使机械爪正常使用。
[0031]
一种电驱动舰载直升机快速固定及横移系统,要实现捕获、校直、释放和应急动作:捕获动作:当本系统执行捕获动作时,嵌入式控制系统需要通过变频调速模块控制高速端电机转动,并由滚珠丝杠带动动滑轮小车组件,通过链传动机构转化为机械爪向左舷快速运动,捕获直升机探杆。捕获过程中由变频调速模块实时控制机械爪运动速度。具体的:
如图1、图4和图5所示,控制系统控制高速端电动机13转动,通过高速端同步带传动机构14带动滚珠丝杠21旋转,与滚珠丝杠21配合的动滑轮小车22随之直线运动,通过滑轮组传动使得机械爪组24快速直线运动,捕获舰载直升机的探杆,完成捕获动作。
[0032]
校直动作:当本系统执行横向校直动作时,嵌入式控制系统控制低速端电机转动,并由减速机、滚珠丝杠带动动滑轮小车组件,通过链传动机构转化为机械爪横向慢速运动,对直升机探杆进行横向校直。同时在校直过程间歇,需要通过减速机与制动器对机械爪位置进行机械锁止。具体的:如图1、图2、图3、图4和图5所示,控制系统控制离合驱动单元5中的离合解锁电磁铁5-1运行,使得离合拨叉5-3将离合器25接入动力传动,同时控制系统控制低速端电动机4转动,通过低速端同步带传动机构3带动减速机28运行,通过联轴器27将动力传递到离合器25,带动滚珠丝杠21旋转,与滚珠丝杠21配合的动滑轮小车22随之直线运动,随后通过滑轮组传动使得机械爪组24慢速直线运动,对舰载直升机探杆进行校直,同时在校直过程间歇,需要通过减速机28与制动器31对机械爪位置进行机械锁止。
[0033]
释放动作:当本系统执行释放动作时,设备内部需要完成以下动作:由嵌入式控制系统控制机械爪解锁机构动作,进一步通过内部机械爪解锁连杆打开机械爪;嵌入式控制系统控制高速端电机转动,并由滚珠丝杠带动动滑轮小车组件,通过链传动机构转化为机械爪向右舷快速运动,释放直升机探杆,并回到初始位置。具体的:如图1、图4和图5所示,控制系统控制机械爪解锁电动推杆2运行,拉动传动拉线36,传动拉线36与解锁拉杆复位机构35相连,解锁拉杆复位机构35通过传动方管使得机械爪组24的机械爪打开;控制系统控制高速端电动机13转动,并由滚珠丝杠21带动动滑轮小车22,通过滑轮组传动使得机械爪组24快速复位,释放探杆。
[0034]
应急动作:正常情况下中位锁解锁保持机构、紧急锁解锁保持机构内部电磁铁处于带电状态,中位锁、紧急锁处于解锁状态。当紧急情况下出现断电、链条拉断等故障时,电磁铁失电,中位锁、紧急锁伸出,实现对机械爪组的快速中位锁止或紧急锁止。具体的:如图1和图6所示,正常运行时,中位锁解锁保持机构26、紧急锁解锁保持机构34内部电磁铁处于带电状态,中位锁解锁电动推杆29和紧急锁解锁电动推杆30通过中位锁拉杆32、紧急锁拉杆33控制锁止机构23中的中位锁、紧急锁处于解锁状态,出现紧急事故时,电磁铁失电,通过连杆控制锁止机构23使得中位锁和紧急锁伸出,将机械爪锁止。
[0035]
综上所述,本发明的实施例提供了一种电驱动舰载直升机快速固定及横移系统,适用于多种舰载直升机型,能够在4级以上甚至6级恶劣情况下使用,提高了舰载直升机使用适应性;对舰载直升机的捕获、释放、校直和快速系留动作自动控制,无需其他人力物力,有较高的执行效率;使用电动机作为动力,实现动力系统电气化。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips