
 商标分类
商标分类  商标转让
商标转让 
用于垂直起降飞行器的着舰装置及舰船的制作方法
 2021-02-13 01:02:27|
2021-02-13 01:02:27| 354|
354| 起点商标网
起点商标网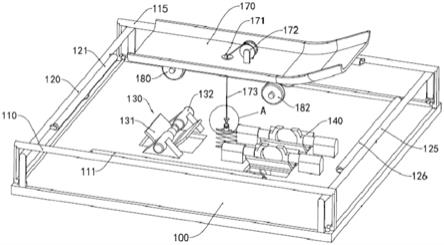
[0001]
本实用新型涉及舰载垂直起降飞行器助降领域,具体涉及一种用于垂直起降飞行器的着舰装置以及具有这种着舰装置的舰船。
背景技术:
[0002]
舰载垂直起降飞行器,如直升机、无人机等,在着舰的时候需要依靠着舰装置实现,而现有的着舰装置主要是使飞行器以刚性着舰的方式进行。以直升机为例,直升机的着舰装置主要有“拉降”式、“鱼叉-格栅”式、“助降网”式等三种着舰装置。
[0003]
拉降式着舰装置主要由设在直升机上的引索、引索绞车、主探管、尾探管和设在舰艇上的拉降索及拉降绞车、夹紧机构和操纵室等构成。直升机准备着舰时,直升机悬停在飞行甲板上空6至8米的高度,放出主探管,并从主探管中伸出引索。甲板上的舰员用接地夹具,将引索和甲板上的拉降索对接,然后直升机飞行员启动机上的引索绞车,将引索回收,从而牵引拉降索进入机内并固定。舰面引降员启动拉降绞车回收拉降索,同时飞行员控制直升机,使直升机产生一个与舰船甲板升沉相一致的升力,确保在拉降索的作用下,直升机的升降与舰船甲板的升沉同步,在拉降绞车的拉力作用下,把直升机拉引着舰。直升机着舰后,主探管便插入甲板上的夹紧机构中,引降员迅速控制夹紧,把直升机系留在飞行甲板上。随后,飞行员放出机上的尾探管,尾探管卡在飞行甲板上的格栅中把机尾固定,完成直升机整个着舰过程。拉降式着舰装置主要适用于10吨以上的大型直升机的着舰,适用于6级以下的海况实现着舰,其中,系留式着舰方式是拉降式着舰方式在无人船上回收垂直升降无人飞机的一种特殊应用,使用系留式辅助垂直升降无人飞机着舰时,无人船将拉降索直接系在垂直升降无人飞机的下方,回收时直接收紧拉降索并将垂直升降无人飞机直接收回到无人船上。
[0004]
鱼叉-格栅式着舰装置主要由设在直升机腹下的鱼叉状锁紧装置和飞行甲板上的格栅构成。格栅的版面直径约为2.5米上列孔格。鱼叉锁紧装置采用液压驱动,由飞行员操纵,可伸出或缩进。直升机着舰时,放下鱼叉机构,着舰时鱼叉机构叉入飞行甲板上的格栅内,然后鱼叉锁紧装置的锁销立即自动伸出锁定,把直升机固定在甲板上。鱼叉-格栅式着舰装置主要适用于4至5吨的小型飞机,只适用于5级以下海况着舰。
[0005]
助降网式是在甲板上布置有一片网,网由框架支起,网距离地面10至12厘米。当直升机降落时,机轮卡在网内,保持稳定。
[0006]
目前直升机的起落架主要有滑撬式、轮式、滑撬与轮组合式三种,其中滑撬式、滑撬与轮组合式起落架没有减震效果,轮式起落架虽然有一定的减震效果,但因为重量较大,减震效果也不理想。不管滑撬式还是轮式起落架的直升机,目前直升机在着舰时都存在一定的困难。现有的三种着舰方式的主要问题是通用性不强,拉降式能较好地解决6级以下海况直升机着舰,但只适合升力大的大型直升机,不适合升力不够大的中小型直升机;鱼叉-栅格式(只适用于4吨至5吨的小型直升机)和助降网式直升机降落甲板都属于刚性着舰,只适用于5级以下海况,由于舰船在海面上摇摆晃动起伏不定,直升机垂直着舰时容易直接撞
击到甲板上。另外,在直升机下落的过程中若下落速度控制不好,直升机停靠甲板的瞬间也会与甲板产生较大冲击力的碰撞,从而造成事故,而着舰时发生的事故这也是直升机的所有飞行事故之中占比较高的一项。目前,垂直升降无人飞机在无人船上降落只能使用系留式,受系留绳长度的限制,垂直升降无人飞机使用时无法远离无人船,限制了无人飞机作用的发挥。
[0007]
现有一种用于船舰的飞行器垂直起降的着舰装置如图1与图2所示,舰船的船体上设置有甲板20,作为着舰装置的升空平台设置在甲板20上,该升空平台包括三层结构,分别是由上而下依次设置的上层平台10、动力装置层60以及减震层70,上层平台10固定在动力装置层60的上方,减震层70固定在动力装置层60的下方。飞行器50锁紧在上层平台10上,随升空平台10一起降落在甲板20上。
[0008]
动力装置层60设置有动力装置及飞行控制系统,例如设置旋翼或者涡扇发动机等,在动力装置的作用下升空平台可上升,向飞行器50底部靠近,以便于飞行器50锁定在上层平台10的上表面。
[0009]
减震层70下方设有一根连接到舰船电力系统的动力电缆(图中未示),减震层70下方设有减震降落架35以及一根主探管30,动力电缆提供升空平台上的所有动力装置的电力供应,减震降落架35采用液压系统减震,主探管30内设有主拉降索31。另外,在减震层70的四个角上设置有辅助探管40,辅助探管40内设置有辅助拉降索41。
[0010]
着舰装置还包括设置在舰船甲板20下方的电缆绞车和主拉降绞车32、辅助拉降绞车43,动力电缆连接到电缆绞车,电缆绞车可释放或回收动力电缆。主拉降索31缠绕在主拉降绞车32外,主拉降绞车32可回收或释放主拉降索32。相应的,辅助拉降索41缠绕在辅助拉降绞车43外,辅助拉降绞车43可回收或释放辅助拉降索41。甲板20下方还设置有过度轮42,辅助拉降索41可以绕过度轮42的一部分表面实现转向。
[0011]
动力装置层60上设置有多个旋翼安装架以及涡扇发动机安装架,多个旋翼安装架以及涡扇发动机安装架通过桁架连接,每一个旋翼安装架内安装有旋翼,当升空平台需要上升时,通过驱动多个旋翼转动从而带动升空平台的上升。每一个涡扇发动机安装架内安装一个涡扇发动机。
[0012]
在上层平台10的上表面设置有锁紧装置12,该锁紧装置12包括捕获器组件,捕获器组件包括设置在上层平台10上的捕获器支架以及安装在捕获器支架上的多个捕获爪组件,多个捕获爪组件可相对于捕获器支架移动。当飞行器滑橇起落架进入捕获器组件的捕获范围时,捕获爪组件可以将飞行器的滑撬立柱锁紧,从而将飞行器固定在上层平台10上,随着升空平台缓慢下降至甲板20上,实现飞行器的降落,这样可以避免飞行器50直接降落在甲板20上对甲板20造成冲击。
[0013]
但是,由于这种着舰装置需要飞行器50滑橇起落架缓慢进入捕获器组件的捕获范围内,才能够通过捕获爪组件将飞行器的滑撬立柱捕获并固定,但由于飞行器在空中容易受到风力影响,与上层平台的对接存在一定的困难,这需要对飞行器与升空平台较精准的控制,飞行器与升空平台的对接控制难度较大。
技术实现要素:
[0014]
本实用新型的第一目的在于提供一种用于垂直起降飞行器的着舰装置,以降低垂
直起降飞行器着舰时产生事故的频率。
[0015]
本实用新型的第二目的在于提供一种具有上述着舰装置的舰船。
[0016]
为实现上述的第一目的,本实用新型提供的用于垂直起降飞行器的着舰装置包括升空平台,升空平台上设置有多个用于驱动升空平台上升或者下降的动力装置;升空平台下方设有动力电缆和探管,探管内设有拉降索,且升空平台下方还设置有减震降落架;其中,升空平台包括上层平台,上层平台位于升空平台的上端,且上层平台设置有拉紧组件,拉紧组件用于将飞行器与上层平台拉到一起,上层平台上还设置有锁紧飞行器的锁紧装置。
[0017]
由上述方案可见,当垂直起降飞行器,如直升机、垂直起降无人机等需要着舰时,飞行器飞临舰船飞行甲板上空的8至15米处悬停(当舰船在航行时,飞行器飞临舰船甲板上空的8至15米处相对悬停),升空平台的动力装置带动升空平台升空,升空平台拖带拉降索上升,升空平台在离垂直起降飞行器正下方3至5米的空中悬停或相对悬停,此时,可以通过拉紧组件将垂直起降飞行器与上层平台拉到一起,这样,不需要飞行器与上层平台之间非常精准的定位,也可以将飞行器固定在上层平台上。
[0018]
当拉降索被收回时,飞行器与升空平台共同产生一个向上的升力,这个升力必须确保升空平台和飞行器的升降与复杂海况舰船飞行甲板的升沉相同步,拉降索始终处于张力的作用下。在拉降过程中,升空平台与甲板升沉始终保持高度的一致,舰船甲板除了有升沉运动外,还有摆动,升空平台通过激光雷达、无线电、有线电等方式获取甲板的摆动姿态信息,升空平台飞行控制系统使平台姿态保持水平姿态或与甲板摆动姿态保持一致,拉降索逐步收短的同时,升空平台逐渐向甲板靠近,拉降绞车通过拉降索将升空平台拉回到甲板瞬间,升空平台下方的减震降落架对甲板起到缓冲作用,避免升空平台与甲板直接产生刚性接触,从而避免飞行器通过升空平台与甲板产生刚性接触。同时,舰船在摇摆晃动时,减震降落架也可以保持在自平衡状态,从而避免飞行器与甲板产生碰撞。
[0019]
一个优选的方案是,升空平台上设置有拉缆接头及夹持组件,拉缆接头设置在升降架上,拉缆接头的下端与拉缆固定连接,拉缆缠绕在拉缆卷绕机上;夹持组件还包括设置在拉缆接头上方的至少一对夹持滚轮。
[0020]
由此可见,在飞行器上可以设置与引缆配合的引缆接头,当飞行器需要降落时,将引缆从机腹中放出,引缆接头与拉缆接头相互固定,当飞行器将引缆回收时,将拉缆带入飞行器内并锁定,拉缆接头和引缆接头脱离,此时,垂直起降飞行器加大一定的升力,升空平台减少一定的升力,使拉缆保持一定的张力,升空平台上拉缆绞车收紧拉缆,将飞行器与上层平台逐渐拉到一起并固定。
[0021]
并且,本实用新型通过夹持滚轮对引缆进行夹持固定,可以避免拉缆接头与引缆接头无法对接的问题。
[0022]
进一步的方案是,夹持滚轮的数量为两对以上,两对夹持滚轮相互垂直设置。
[0023]
可见,在两个相互垂直的方向上设置两对夹持滚轮,可以在一个平面的两个方向上将引缆夹持固定,确保拉缆接头与引缆接头顺利对接。
[0024]
进一步的方案是,夹持组件还包括滚轮转动驱动装置,滚轮转动驱动装置带动夹持滚轮绕自身轴线转动。
[0025]
这样,当夹持滚轮将引缆夹持后,通过夹持滚轮的转动可以收起滚轮下方冗余的
引缆,带动引缆接头上升并夹持,有利于将引缆接头插入到拉缆接头中。
[0026]
更进一步的方案是,上层平台的上表面设置有轮组锁紧装置,轮组锁紧装置设置在夹持滚轮的下方;或者上层平台的上表面设置有滑撬立柱夹持装置,滑撬立柱夹持装置设置在夹持滚轮的下方。
[0027]
由此可见,在上层平台上设置轮组锁紧装置或者滑撬立柱夹持装置,可以针对轮式或者滑撬式起落架的飞行器进行夹持固定,有利于将飞行器固定在上层平台上。
[0028]
一个可选的方案是,拉紧组件包括捕获抓钩组件,捕获抓钩组件包括一根丝杆以及设置在丝杆周向上的至少两个捕获抓钩,每一捕获抓钩的固定端固定在一个螺母套上,该螺母套可以相对于丝杆上下移动,每一捕获抓钩的自由端设置有钩合部,丝杆的下端还设置有伸缩装置。
[0029]
这样,可以使用捕获抓钩组件将飞行器的起落架钩住后,将捕获抓钩组件缓慢的降落,实现飞行器缓慢的降落到上层平台上,这样可以避免飞行器需要精准的与上层平台定位,并且通过捕获抓钩组件将飞行器与上层平台拉到一起并固定。
[0030]
进一步的方案是,丝杆的上端设置有固定环,每一捕获抓钩的杆体通过一根连杆连接至固定环。
[0031]
由此可见,丝杆转动时,螺母套相对于丝杆上下移动,连接杆可以带动每一根捕获抓钩展开或者收缩,从而实现捕获抓钩组件在展开与收缩两个状态之间变化。
[0032]
更进一步的方案是,连接杆外套设有减震器件,减震器件的两端分别固定在连接杆的两端。
[0033]
可见,减震器件可以缓冲捕获抓钩组件钩住飞行器的过程中产生的震动,从而避免上层平台受到剧烈的冲击。
[0034]
更进一步的方案是,上层平台上设置有转盘降落台,转盘降落台下设置有磁场产生器件;上层平台上还设置有机械臂组件,机械臂组件包括夹持臂,夹持臂的自由端设置有夹持件,夹持件位于转盘降落台的上方。
[0035]
由此可见,当飞行器降落到升空平台后,转盘降落台可以产生较强的磁场并且将飞行器吸附,使用机械臂组件将电池组件、加油枪和充电插头夹持可实现无人机电池更换、油箱加油和充电的操作,适用于小型的无人机在不需要降落到甲板的情况下可以实现电池的更换、油箱加油和充电。
[0036]
为了实现上述的第二目的,本实用新型提供的舰船包括船体,船体上设置有上述的着舰装置。
附图说明
[0037]
图1是现有一种具有着舰装置的舰船的结构示意图。
[0038]
图2是现有的着舰装置与飞行器的起落架的结构图。
[0039]
图3是本实用新型着船舰第一实施例的结构图。
[0040]
图4是本实用新型着舰装置第一实施例上层平台与飞行器的局部结构示意图。
[0041]
图5是图4中a处放大图。
[0042]
图6是本实用新型着舰装置第一实施例上层平台与轮组锁紧装置的结构示意图。
[0043]
图7是飞行器降落到本实用新型着舰装置第一实施例上层平台第一阶段的结构示
意图。
[0044]
图8是飞行器降落到本实用新型着舰装置第一实施例上层平台第二阶段上层平台的俯视图。
[0045]
图9是飞行器降落到本实用新型着舰装置第一实施例上层平台第一阶段的剖视图。
[0046]
图10是图9的b处放大图。
[0047]
图11是飞行器降落到本实用新型着舰装置第一实施例上层平台第三阶段的剖视图。
[0048]
图12是本实用新型着舰装置第二实施例上层平台与飞行器的局部结构示意图。
[0049]
图13是本实用新型着舰装置第二实施例上层平台与滑撬立柱夹持装置的结构示意图。
[0050]
图14是飞行器降落到本实用新型着舰装置第二实施例上层平台第一阶段的结构示意图。
[0051]
图15是飞行器降落到本实用新型着舰装置第二实施例上层平台第二阶段上层平台的俯视图。
[0052]
图16是飞行器降落到本实用新型着舰装置第二实施例上层平台第一阶段的剖视图。
[0053]
图17是图16中c处的放大图。
[0054]
图18是飞行器降落到本实用新型着舰装置第二实施例上层平台第三阶段的剖视图。
[0055]
图19是本实用新型着舰装置第三实施例上层平台与飞行器的局部结构示意图。
[0056]
图20是本实用新型着舰装置第三实施例的捕获抓钩组件的结构图。
[0057]
图21是本实用新型着舰装置第三实施例的捕获抓钩组件工作状态的局部结构图。
[0058]
图22是本实用新型着舰装置第三实施例上层平台与飞行器局部的侧面视图。
[0059]
图23是飞行器降落到本实用新型着舰装置第三实施例上层平台第二阶段的结构图。
[0060]
图24是飞行器降落到本实用新型着舰装置第三实施例上层平台第二阶段的侧面视图。
[0061]
图25是飞行器降落到本实用新型着舰装置第三实施例上层平台第三阶段的结构图。
[0062]
图26是飞行器降落到本实用新型着舰装置第三实施例上层平台第三阶段的侧面视图。
[0063]
图27是本实用新型着舰装置第四实施例上层平台与飞行器的局部结构示意图。
[0064]
图28是本实用新型着舰装置第五实施例的捕获抓钩组件的伸缩装置的结构图。
[0065]
图29是本实用新型着舰装置第五实施例的捕获抓钩组件的伸缩装置的结构分解图。
[0066]
图30是本实用新型着舰装置第六实施例的充电组件与飞行器局部的结构图。
[0067]
图31是本实用新型着舰装置第七实施例的转盘降落台、机械臂组件与飞行器局部的结构图。
[0068]
图32是本实用新型着舰装置的动力装置第一种变化方式与上层平台的结构示意图。
[0069]
图33是本实用新型着舰装置的动力装置第二种变化方式与上层平台的结构示意图。
[0070]
图34是本实用新型着舰装置的动力装置第三种变化方式与上层平台的结构示意图。
[0071]
图35是本实用新型着舰装置的动力装置第四种变化方式与上层平台的结构示意图。
[0072]
图36是本实用新型着舰装置的动力装置第五种变化方式与上层平台的结构示意图。
[0073]
图37是本实用新型着舰装置的动力装置第六种变化方式与上层平台的结构示意图。
[0074]
图38是本实用新型着舰装置的动力装置第七种变化方式与上层平台的结构示意图。
[0075]
图39是本实用新型着舰装置的动力装置第八种变化方式与上层平台的结构示意图。
[0076]
图40是本实用新型着舰装置的动力装置第九种变化方式与上层平台的结构示意图。
[0077]
图41是本实用新型着舰装置的动力装置第十种变化方式与上层平台的结构示意图。
[0078]
图42是本实用新型着舰装置第一实施例夹持件第一实施方式的结构图。
[0079]
图43是本实用新型着舰装置第一实施例夹持件第二实施方式的结构图。
[0080]
图44是本实用新型着舰装置第一实施例与飞行器的结构图。
[0081]
图45是本实用新型着舰装置第一实施例与飞行器的结构分解图。
[0082]
图46是本实用新型着舰装置第一实施例中动力装置层的结构分解图。
[0083]
图47是本实用新型着舰装置第一实施例中动力装置层的俯视图。
[0084]
图48是本实用新型着舰装置第一实施例中旋翼的结构图。
[0085]
图49是本实用新型着舰装置第一实施例中涡扇发动机的结构图。
[0086]
图50是本实用新型着舰装置第一实施例中旋翼内部结构安装示意图。
[0087]
图51是本实用新型着舰装置第一实施例中旋翼与旋翼安装架的剖视图。
[0088]
图52是本实用新型着舰装置第一实施例中涡扇发动机与涡扇发动机安装架的剖视图。
[0089]
图53是本实用新型着舰装置第一实施例中涡扇发动机与涡扇发动机安装架另一种安装方式的剖视图。
[0090]
图54是本实用新型着舰装置第八实施例的捕获抓钩组件的结构图。
[0091]
图55是本实用新型着舰装置第八实施例的捕获抓钩组件与上层平的结构分解图。
[0092]
图56是本实用新型着舰装置第八实施例的捕获抓钩组件与上层平的结构图。
[0093]
以下结合附图及实施例对本实用新型作进一步说明。
具体实施方式
[0094]
本实用新型的舰船可以是有人驾驶的舰船,也可以是无人驾驶的舰船。本实用新型的着舰装置设置在舰船的甲板上,用于辅助垂直起降的飞行器着舰,例如直升飞机或者垂直起降的无人机等。
[0095]
第一实施例:
[0096]
本实施例的着舰装置主要应用于如直升机、垂直升降无人机等垂直起降的飞行器在舰船上的降落,以避免发生降落事故。
[0097]
参见图3,本实施例的舰船包括有船体,船体上设置有甲板129,升空平台设置在甲板129上。本实施例的升空平台包括三层结构,分别是由上而下依次设置的上层平台100、动力装置层101以及减震层109,上层平台100固定在动力装置层101的上方,减震层109固定在动力装置层101的下方,动力装置层101设置有多根桁架。飞行器175锁紧在上层平台100上,随升空平台一起降落在甲板129上,这样可以避免飞行器直接降落到甲板129上,避免飞行器175与剧烈晃动的甲板129刚性碰撞。
[0098]
参见图44与图45,本实施例的上层平台100为正方形,当然也可以为其他的对称形状如矩形、正五边形、圆形等。并且,上层平台100上可以设置定位、瞄准、对接引导等系统,动力装置层101设置有动力装置及飞行控制系统,例如设置旋翼或者涡扇发动机等,在动力装置的作用下升空平台可上升,向飞行器175底部靠近,以便于飞行器175锁定在上层平台100的上表面。
[0099]
减震层109下方设有一根连接到舰船电力系统的动力电缆(图中未示),动力电缆也可以是动力复合缆,动力复合缆内设置有动力电缆、控制电缆、通信电缆等,分别与舰船上的动力、控制和通信系统相连接。减震层109下方设有减震降落架105以及一根主探管103。其中,动力电缆提供升空平台上的所有动力装置的电力供应,减震降落架105采用液压系统减震,主探管103内设有主拉降索106。另外,在减震层109的四个角上设置有辅助探管104,辅助探管104内设置有辅助拉降索108。优选的,四根辅助探管104对称的设置在减震层109上。
[0100]
着舰装置还包括设置在舰船甲板129下方的电缆绞车和主拉降绞车128、辅助拉降绞车107,动力电缆连接到电缆绞车,电缆绞车可释放或回收动力电缆。主拉降索106缠绕在主拉降绞车128外,主拉降绞车128可回收或释放主拉降索106。相应的,辅助拉降索108缠绕在辅助拉降绞车107外,辅助拉降绞车107可回收或释放辅助拉降索108。优选的,甲板129下方还设置有过度轮,辅助拉降索108可以绕过度轮的一部分表面实现转向。
[0101]
当然,可以取消主探管103以及主拉降索106,设置在四个角落上的四根辅助拉降索108均构成主拉降索。
[0102]
此外,上层平台100的表面上还设有照明系统(图中未示出),使上层平台100在夜间也可以供飞行器175进行着舰作业。上层平台100表面还有激光雷达、视觉检测装置及无线电等定位、瞄准、对接引导等系统(图中未出)。
[0103]
参见图46与图47,本实施例的动力装置层101包括主框架1201,主框架1201上设置有多个旋翼安装架1210以及涡扇发动机安装架1211,多个旋翼安装架1210以及涡扇发动机安装架1211通过桁架1205连接,每一个旋翼安装架1210内安装有旋翼1220,当升空平台需要上升时,通过驱动多个旋翼1220的转动从而带动升空平台的上升。每一个涡扇发动机安
装架1211内安装一个涡扇发动机1240。升空平台上设置航空油箱及油管。另一种方式是,动力装置层101上同时设置旋翼以及涡扇发动机,例如在动力装置层101的四个角上,设置四个旋翼以及二个对角线四分之一和四分之三处设置四个涡扇发动机。此外,动力装置层101上设置的涡扇发动机的数量可以是两个或者三个,如果设置两个涡扇发动机时,两个涡扇发动机可以设置在主探管103的两侧,如果涡扇发动机的数量为三个,三个涡扇发动机位于一个正三角形的三个顶点上,且该三角形的内切圆的圆心为动力装置层101的中心点。
[0104]
在主框架1201上设置有多根支撑杆1203,上层平台100可以支撑在多根支撑杆1203的顶端。主框架1201的下端设置有多根连接杆1202,减震层109连接在多根连接杆1202的下端。从图47可见,动力装置层101包括四个旋翼1220以及四个涡扇发动机1240,四个旋翼1220位于四个角上,而四个涡扇发动机1240则位于靠近主框架1201中心的位置。
[0105]
参见图48,旋翼1220包括圆柱状的外壳1221,外壳1221可以固定在圆环柱状的旋翼安装架1210内,例如通过焊接或者螺钉等方式固定。外壳1221内设置有连接杆1222,旋翼1220的主体部1230通过连接杆1222固定在外壳1221内,旋翼1220的主体部1230还设置有叶片1223。参见图50与图51,外壳1221的顶端设置有外扩的喇叭口1224,喇叭口1224可以固定在旋翼安装架1210的顶端。在旋翼1220的主体部1230内设置有电机1226,电机1226固定在安装板1225上,叶片1223固定在电机1226的转轴1227径向外侧。旋翼1220是常见的飞行动力装置,本实施例可以使用现有的旋翼结构。
[0106]
参见图49,涡扇发动机1240包括外壳1241,外壳1241的侧壁上设置有两根固定柱1242,两根固定柱1242插入到涡扇发动机安装架1211,从而实现涡扇发动机1240与涡扇发动机安装架1211的固定。在外壳1241的顶端设置有气流开口1243。参见图52,涡扇发动机1240的主体部1245设置在外壳1241内,涡扇发动机1240是常见的飞行动力装置,本实施例可以使用现有的涡扇发动机结构。
[0107]
图52所示的涡扇发动机是沿竖直方向安装,即涡扇发动机的轴线与上层平台100的主面垂直。实际应用时,涡扇发动机也可以沿水平方向安装,但需要设置一根弯管。参见图53,涡扇发动机安装架1211的轴线沿水平方向设置,即平行于上层平台100的主面,且涡扇发动机1240的主体部1245的轴线也是平行于上层平台100的主面。在涡扇发动机1240的出气端设置有弯管1246,弯管1246为90
°
的弯管,弯管1246的自由端朝下,且自由端的轴线沿竖直方向。由于涡扇发动机1240喷出的气流为高温高压的气体,因此,弯管1246需要使用耐高温高压的金属材料制成。涡扇发动机垂直安装方式改为水平安装方式时,涡扇发动机配备的弯管喷口位置必须与垂直安装的涡扇发动机的喷口位置相同。
[0108]
当然,四个旋翼可以使用涵道替代,或者,四个涡扇发动机也可以使用涵道替代。
[0109]
参见图4、图5与图6,上层平台100设置有拉紧组件,拉紧组件包括设置在上层平台100上表面的升降架150,拉缆接头151设置在升降架150的上端。升降架150可以是剪叉升降机构,在电机等驱动部件的驱动下上升或者下降,从而带动拉缆接头151相对于上层平台100上升或者下降。
[0110]
飞行器175的机腹170的内侧表面,即图4中的上侧表面设置有收线轮172,引缆173可以缠绕在收线轮172的周向上。在引缆的端部设置有引缆接头174,优选的,引缆接头174的上端设置有限位板176。引缆接头174主体部成圆柱状,下端为圆锥体,引缆接头174可以插入到拉缆接头151内。机腹170设置有通孔171,引缆接头174以及引缆173可以穿过通孔
171伸出飞行器175并垂下。
[0111]
从图5可见,拉缆接头151的中部设置有容纳腔152,引缆接头174可以插入容纳腔152内。优选的,拉缆接头151内可以设置锁定机构,例如设置锁定销将引缆接头174锁定在容纳腔152内。一种可选的方式是,在容纳腔152内设置微控开关,当引缆接头174插入到容纳腔152后,通过电机带动一根锁定销运动并穿过拉缆接头151以及引缆接头174,从而将引缆接头174锁定在拉缆接头151内。
[0112]
在上层平台100上设置有两对夹持滚轮,第一对夹持滚轮包括滑杆110以及固定在滑杆110一侧的滚轮111,在上层平台100的边缘处设置滑槽,滑杆110的两端通过支撑杆113设置在滑槽上,滑杆110可以在驱动电机114的驱动下在滑槽上滑动,进而带动滚轮111相对于上层平台100滑动。
[0113]
与滑杆110相对的是滑杆115,滑杆115与滑杆110相互平行设置,滑杆115靠近滑杆110的一侧设置有滚轮116。从图6可见,滚轮111与滚轮116都是长条状的滚轮,且滚轮111与滚轮116相互平行,因此,滚轮111与滚轮116构成第一对夹持滚轮。滑杆115的两端通过支撑杆117支承在滑槽上,并且在电机的驱动下在滑槽上滑动。优选的,滑杆110与滑杆115可以设置在同一条滑槽上,滑杆110与滑杆115可以向背运动或者相向运动。
[0114]
优选的,在滚轮111、116的一端设置滚轮转动驱动装置,例如驱动电机,用于驱动滚轮111、116沿自身的轴线转动,例如顺时针转动或者逆时针转动。
[0115]
另一对夹持滚轮包括相互平行的滑杆120与滑杆125,滑杆120靠近滑杆125的一侧设置长条状的滚轮121,滑杆125靠近滑杆120的一侧设置长条状的滚轮126,滚轮121与滚轮126相互平行设置。并且,滑杆120与滑杆110相互垂直,因此,两组夹持滚轮的延伸方向是相互垂直的。
[0116]
滑杆120与滑杆125的两端分别通过支撑杆支承在另一组滑槽上,并且可以在滑槽上往复滑动,也就是滑杆120的滑动方向与滑杆110的滑动方向是相互垂直的。在垂直于上层平台100的方向上,滑杆110、115、120、125均位于拉缆接头151的上方。
[0117]
为了确保飞行器175能够牢固的固定在上层平台100上,在上层平台100的上表面设置有轮组锁定装置,由于飞行器175的机腹170下设置一个前轮180以及两个后轮182,因此,本实施例的轮组锁定装置包括一个前轮锁定装置130以及两个后轮锁定装置140。
[0118]
前轮锁定装置130包括两块导向板131,两块导向板131形成v字形,且敞口端朝上,以便于前轮180固定。在两块导向板131的两端分别设置有卡轴座132、134,在卡轴座132靠近卡轴座134的一侧设置有卡轴件133,在卡轴座134靠近卡轴座132的一侧设置有卡轴件135,因此,卡轴件133与卡轴件135是相对设置的。并且,卡轴件133可以相对于卡轴座132伸出或者收缩,卡轴件135可以相对于卡轴座134伸出或者收缩。
[0119]
当前轮180位于两块导向板131之间时,卡轴件133从卡轴座132伸出,卡轴件135从卡轴座134伸出,将前轮180的转轴卡住,避免前轮180相对于导向板131移动。
[0120]
两个后轮锁紧装置140相互平行的设置,每一个后轮锁紧装置140包括锁紧座141、143,锁紧座141靠近锁紧座143的一侧设置有锁紧件142,锁紧件142可以相对于锁紧座141伸出或者收缩,且锁紧件142的端部为圆弧状的开口。锁紧座143靠近锁紧座141的一侧设置有锁紧件144,锁紧件144可以相对于锁紧座143伸出或者收缩,且锁紧件144的端部为圆弧状的开口。锁紧件142与锁紧件144之间形成圆形的空间,后轮182可以被夹持在该空间内,
从而将后轮182锁紧在上层平台100上。
[0121]
上层平台100的下方设置有拉缆卷绕机160,拉缆161缠绕在拉缆卷绕机160外,拉缆161的上端与拉缆接头151固定连接。
[0122]
当飞行器175需要降落时,首先,飞行控制系统启动升空平台上的动力装置,例如启动旋翼或者涡扇发动机等,让升空平台上升一定的高度,如上升9米至10米。由于主探管104和辅助探管104均固定在升空平台上,因此主探管103、辅助探管104跟随升空平台一并上升。
[0123]
此时,飞行器175缓慢的悬停在升空平台上方一定的距离,如悬停在上层平台100上方大约3米至5米处,然后通过升空平台上的辅助定位装置确定飞行器175的大约位置,例如在上层平台100上设置摄像头,通过摄像头拍摄飞行器175底部的图像,对图像分析后确定飞行器175大概的位置。此时,飞行控制系统控制升空平台上的动力装置,使得升空平台移动至飞行器175下方合适的位置。通过图像识别、激光等方式实现对准、定位是公知的技术,在此不再详细说明。
[0124]
然后,在飞行器175悬停的情况下,飞行器上的引缆173穿过通孔171并被抛下,如图7所示,引缆173下端的引缆接头174逐渐的向上层平台100靠近。但是,由于海上风浪较大,引缆173容易受风力影响而无确定方向的摆动,因此,需要通过两组夹持滚轮将引缆173夹持并固定。
[0125]
当引缆173抛下后,引缆接头174缓慢下降并下降至两组夹持滚轮的下方,然后,滑杆110、115在电机的驱动下相互靠近,同时,滑杆120、125在电机的驱动下相互靠近,如图8所示。随着每一组滑杆的相互靠近,引缆173的下端将被两组夹持滚轮所包围,如图9与图10所示,当滑杆110与滑杆115相互靠近时,引缆173的下端被滚轮111与滚轮116所夹持。相同的,在另一方向上,引缆173的下端被滚轮121与滚轮126所夹持。
[0126]
接着,滚轮111在电机的驱动下逆时针转动,滚轮116在电机的驱动下顺时针转动,在摩擦力的作用下,带动引缆173向上移动,从而带动引缆接头174向上移动。此时,升降架150带动拉缆接头151向上移动,使得引缆接头174插入到拉缆接头151内,最后锁定销将拉缆接头151与引缆接头174锁定。
[0127]
此时,飞行器175的收线轮172转动,将引缆173回收到机腹170内,拉缆接头151跟随引缆173进入飞行器175内并被夹持在机腹170的上方,然后,将拉缆接头151和引缆接头174脱离。本实施例中,飞行器175的机腹的上方设置有一个夹持件,用于夹持拉缆接头151。此时,垂直起降飞行器加大一定的升力,升空平台减少一定的升力,使拉缆161保持一定的张力,升空平台通过拉缆卷绕机160收紧拉缆161,将飞行器175与上层平台100逐渐拉到一起并固定,如图11所示。
[0128]
设在飞行器175内的夹持件有多种结构,图42示出了其中一种结构,夹持件190为一个可以张开的夹子,夹子包括两个夹臂192,两个夹臂192的末端连接有气缸191,气缸191可以带动夹子张开或者夹闭。夹臂192的前端为夹持部193,拉缆接头151可以夹持在两个夹持部之间。例如,如图5所示,拉缆接头的中部设置有以前凹槽153,夹持部193可以夹持在凹槽153外。
[0129]
图43示出了夹持件另一种结构,夹持件195包括两个可相互分离或者相互靠近的夹持部件,每一个夹持部件包括一个支架196,支架196上设置有电机199,支架196的一端设
置有夹持块197,两个夹持块197均设置有半圆形的开口,电机199可以带动夹持块197相互靠近或者相互远离,两个夹持块197相互靠近后,形成圆形的通孔198,拉缆接头151可以被夹持在通孔198内,例如拉缆接头151的凹槽153位于通孔198内。
[0130]
随后,主拉降绞车128、辅助拉降绞车107开始转动,收回主拉降索106、辅助拉降索108,从而带动升空平台下降。这样,飞行器175随升空平台一并下降,当升空平台下降到甲板129后,即实现飞行器175的着舰。
[0131]
当升空平台降落到甲板129的瞬间,减震降落架105的下端将抵接到甲板129的上表面,并且为升空平台提供缓冲的力,避免升空平台硬着陆在甲板129上而导致甲板129的震动,也避免升空平台上的飞行器175剧烈震动。
[0132]
由于海上作业时,海况较为复杂,海浪可能将船体向上抛起,为了避免船体瞬间升高或者下降对升空平台造成冲击,在升空平台下降过程中,升空平台的动力装置始终工作并且提供升力,这样,即使船体被海浪抛起而瞬间升高并导致主拉降索106、辅助拉降索108无法提供下降的拉力时,由于升空平台的动力装置始终提供升力,此时升空平台也会在升力的作用下迅速升高,从而避免因甲板129瞬间升高而冲击升空平台,避免甲板129撞击在升空平台上。
[0133]
当然,本实施例中,拉缆接头151与引缆接头174是通过锁定销锁定,实际应用时,还可以通过磁场实现拉缆接头151与引缆接头174的相互固定,例如在拉缆接头151内设置线圈,当使用金属制成的引缆接头174插入到拉缆接头151后,线圈通电并产生磁场,由此将引缆接头174固定在拉缆接头151内。
[0134]
当然,前轮锁紧装置130与后轮锁紧装置140均可以设置卡轴座以及卡轴件,并且还设置锁紧座以及锁紧件,即针对同一个轮子,既对轮子进行抱紧,又对轮轴进行卡紧,例如,轮子降落到两块导向板之间时,首先使用两个锁紧件将轮子抱紧,然后使用卡轴件将轮子的轴卡紧,使得轮子的卡紧更加牢固。优选的,两块导向板在上层平台100上可以翻折,即导向板与上层平台100之间的夹角可以变化。
[0135]
第二实施例:
[0136]
第一实施例主要是针对轮式起落架的飞行器的降落,本实施例主要是针对滑撬式起落架的飞行器的降落。本实施例的舰船包括有船体,船体上设置有甲板,升空平台设置在甲板上。升空平台包括三层结构,分别是由上而下依次设置的上层平台、动力装置层以及减震层,三层之间通过桁架固定连接。飞行器可以锁紧在上层平台上,随升空平台一起降落在甲板上。上层平台、动力装置层以及减震层的结构与第一实施例相同,在此不再赘述。
[0137]
参见图12、图13与图14,上层平台200设置有拉紧组件,本实施例的拉紧组件包括设置在上层平台20上表面的升降架250,拉缆接头251固定在升降架250的上端。升降架250可以是剪叉升降机构,在电机等驱动部件的驱动下上升或者下降,从而带动拉缆接头251相对于上层平台200上升或者下降。
[0138]
飞行器的机腹270的内侧表面设置有收线轮272,引缆273可以缠绕在收线轮272的周向上。在引缆273的端部设置有引缆接头274,优选的,引缆接头274的上端设置有限位板。引缆接头274主体部成圆柱状,下端为圆锥体,引缆接头274可以插入到拉缆接头251内。机腹270设置有通孔271,引缆接头274以及引缆273可以穿过通孔271伸出飞行器并垂下。
[0139]
参见图17,拉缆接头251的中部设置有容纳腔252,引缆接头274可以插入容纳腔
252内。优选的,拉缆接头251内可以设置锁定机构,例如设置锁定销将引缆接头274锁定在容纳腔252内。或者,拉缆接头251内设置有线圈,当引缆接头274插入到容纳腔252后,线圈通电并产生磁场,从而将金属制成的引缆接头274吸附并固定。
[0140]
在上层平台200上设置有两对夹持滚轮,第一对夹持滚轮包括滑杆210以及固定在滑杆210一侧的滚轮211,在上层平台200的边缘处设置滑槽,滑杆210的两端通过支撑杆213设置在滑槽上,滑杆210可以在驱动电机214的驱动下在滑槽上滑动,进而带动滚轮211相对于上层平台200滑动。
[0141]
与滑杆210相对的是滑杆215,滑杆215与滑杆210相互平行设置,滑杆215靠近滑杆210的一侧设置有滚轮216。从图13可见,滚轮211与滚轮216都是长条状的滚轮,且滚轮211与滚轮216相互平行,因此,滚轮211与滚轮216构成第一对夹持滚轮。滑杆215的两端通过支撑杆217支承在滑槽上,并且在电机的驱动下在滑槽上滑动。优选的,滑杆210与滑杆215可以设置在同一条滑槽上,滑杆210与滑杆215可以向背运动或者相向运动。
[0142]
优选的,在滚轮211、216的一端设置滚轮转动驱动装置,例如驱动电机,用于驱动滚轮211、216沿自身的轴线转动,例如顺时针转动或者逆时针转动。
[0143]
另一对夹持滚轮包括相互平行的滑杆220与滑杆225,滑杆220靠近滑杆225的一侧设置长条状的滚轮221,滑杆225靠近滑杆220的一侧设置长条状的滚轮226,滚轮221与滚轮226相互平行设置。并且,滑杆220与滑杆210相互垂直,因此,两组夹持滚轮的延伸方向是相互垂直的。
[0144]
滑杆220与滑杆225的两端分别通过支撑杆支承在另一组滑槽上,并且可以在滑槽上往复滑动,也就是滑杆220的滑动方向与滑杆210的滑动方向是相互垂直的。在垂直于上层平台200的方向上,滑杆210、215、220、225均位于拉缆接头251的上方。
[0145]
在上层平台200的上表面设置有两个平行设置的滑撬固定件230,每一个滑撬固定件230设置有两个上端敞口的安装槽231,飞行器的滑撬280可以放置在安装槽231内。从图13可见,在滑杆210的长度方向上,两个滑撬固定件230分别位于靠近滑杆220、滑杆225的位置。并且,上层平台200上还设置有两条相互平行设置的滑撬缓冲板235。
[0146]
在滑杆210的长度方向上,在两个滑撬之间设置有两个滑撬立柱夹持装置240,并且升降架250位于两个滑撬立柱夹持装置240之间。优选的,每一个滑撬立柱夹持装置240均设置在夹持滚轮的下方。每一个滑撬立柱夹持装置240包括三个基座241,三个基座241沿一直线布置。位于外侧的两个基座设置有一个夹持件242,中间的一个基座241向两侧伸出一个夹持件243,一个夹持件242与一个夹持件243相对设置并且可以夹持一根滑撬立柱281。
[0147]
优选的,夹持件242可以相对于基座241伸出或者缩回,而夹持件243也可以相对于基座241伸出或者缩回。进一步的,位于外侧的两个夹持件241可以沿三个基座241分布的直线移动,即两侧的两个基座241与中间的一个基座241的之间的距离可调。
[0148]
参见图14,上层平台200的下方设置有拉降卷扬机260,拉降索261缠绕在拉降卷绕机260外,拉降索261的上端与拉缆接头251的下端固定连接。
[0149]
当飞行器需要降落时,首先,飞行控制系统启动升空平台上的动力装置,例如启动旋翼或者涡扇发动机等,让升空平台上升一定的高度,如上升9米至10米。由于主探管和辅助探管均固定在升空平台上,因此主探管、辅助探管跟随升空平台一并上升。
[0150]
此时,飞行器缓慢的悬停在升空平台上方一定的距离,如悬停在上层平台200上方
大约3米至5米处,然后通过升空平台上的辅助定位装置确定飞行器的大约位置,例如在上层平台200上设置摄像头,通过摄像头拍摄飞行器底部的图像,对图像分析后确定飞行器大概的位置。此时,飞行控制系统控制升空平台上的动力装置,使得升空平台移动至飞行器下方合适的位置。
[0151]
然后,在飞行器悬停的情况下,飞行器上的引缆273穿过通孔271并被抛下,引缆273下端的引缆接头274逐渐的向上层平台200靠近。但是,由于海上风浪较大,引缆273容易受风力影响而无确定方向的摆动,因此,需要通过两组夹持滚轮将引缆273夹持并固定。
[0152]
当引缆273抛下后,引缆接头274缓慢下降并下降至两组夹持滚轮的下方,然后,滑杆210、215在电机的驱动下相互靠近,同时,滑杆220、225在电机的驱动下相互靠近,如图15所示。随着每一组滑杆的相互靠近,引缆273的下端将被两组夹持滚轮所包围,如图16与图17所示,当滑杆210与滑杆215相互靠近时,引缆273的下端被滚轮211与滚轮216所夹持。相同的,在另一方向上,引缆273的下端被滚轮221与滚轮226所夹持。
[0153]
接着,滚轮211在电机的驱动下逆时针转动,滚轮216在电机的驱动下顺时针转动,在摩擦力的作用下,带动引缆273向上移动,从而带动引缆接头274向上移动。此时,升降架250带动拉缆接头251向上移动,使得引缆接头274插入到拉缆接头251内,最后拉缆接头251内的线圈通电使得拉缆接头251与引缆接头274锁定。
[0154]
此时,飞行器的收线轮272转动,将引缆273回收到机腹270内,拉缆接头251跟随引缆273进入机腹270内并被夹持在机腹270的上方,然后,将拉缆接头251和引缆接头274脱离,此时,垂直起降飞行器加大一定的升力,升空平台减少一定的升力,使拉缆261保持一定的张力,升空平台通过拉缆卷绕机260收紧拉缆261,将飞行器275与上层平台200逐渐拉到一起并固定,如图18所示。
[0155]
随后,主拉降绞车、辅助拉降绞车开始转动,收回主拉降索、辅助拉降索,从而带动升空平台下降。这样,飞行器随升空平台一并下降,当升空平台下降到甲板后,即实现飞行器的着舰。
[0156]
当升空平台降落到甲板的瞬间,减震降落架的下端将抵接到甲板的上表面,并且为升空平台提供缓冲的力,避免升空平台硬着陆在甲板上而导致甲板的震动,也避免升空平台上的飞行器剧烈震动。
[0157]
由于海上作业时,海况较为复杂,海浪可能将船体向上抛起,为了避免船体瞬间升高或者下降对升空平台造成冲击,在升空平台下降过程中,升空平台的动力装置始终工作并且提供升力,这样,即使船体被海浪抛起而瞬间升高并导致主拉降索、辅助拉降索无法提供下降的拉力时,由于升空平台的动力装置始终提供升力,此时升空平台也会在升力的作用下迅速升高,从而避免因甲板瞬间升高而冲击升空平台,避免甲板撞击在升空平台上。
[0158]
第一实施例与第二实施例中,夹持组件可以不设置滑杆,直接在两根支撑杆上端设置长条状的滚轮,并且设置驱动滚轮沿自身轴线转动的内置电机,支撑杆的下端可以设置在滑槽上并且可以沿滑槽滑动。
[0159]
第三实施例:
[0160]
本实施例主要是针对滑撬式起落架的飞行器的降落。本实施例的舰船包括有船体,船体上设置有甲板,升空平台设置在甲板上。升空平台包括三层结构,分别是由上而下依次设置的上层平台、动力装置层以及减震层,三层之间通过桁架固定连接。飞行器可以锁
紧在上层平台上,随升空平台一起降落在甲板上。上层平台、动力装置层以及减震层的结构与第一实施例相同,在此不再赘述。
[0161]
参见图19,上层平台300的上方设置有两条滑撬安装槽301,飞行器的每一根滑撬371可以分别安装到一条滑撬安装槽301内。上层平台300的中间位置设置有一个通孔,本实施例的拉紧组件包括可以穿过该通孔的捕获抓钩组件310。捕获抓钩组件310的下端固定在支撑板308上,优选的,支撑板308与上层平台300相互平行并且比上层平台低0.5米左右。
[0162]
参见图20与图21,捕获抓钩组件310包括一根丝杆320,丝杆320位于捕获抓钩组件310的中部,丝杆320的底部设置有电机316,电机316可以带动丝杆310沿自身轴线转动。丝杆310的顶部设置有固定环325,固定环325不能够相对于丝杆310上下移动。
[0163]
丝杆310外套装有一个螺母套326,螺母套326设置有内螺纹,丝杆310转动时,螺母套326可以相对于丝杆310上下移动。在丝杆310的周向外设置有四根捕获抓钩330,每一根捕获抓钩330的固定端固定在螺母套326上,连接杆340连接在固定环325也捕获抓钩330杆体的中部。从图21可见,连接杆340的一端铰接在固定环325上,连接杆340的另一端铰接在捕获抓钩330的杆体上。连接杆340外套装有一根弹簧341,弹簧341作为本实施例的减震器件,其两端分别固定在连接杆340的两端,以避免捕获抓钩330展开或者收缩时产生剧烈的震动。
[0164]
在捕获抓钩330的自由端设置有钩合部331,本实施例中,钩合部331自捕获抓钩330的杆体向下弯折,优选的,钩合部331与杆体相互垂直。
[0165]
初始状态下,捕获抓钩组件310处于如图20所示的状态,当电机316带动丝杆310转动时,螺母套326相对于丝杆310上升,四个捕获抓钩330也逐渐展开,如图21所示的状态。相同的,当丝杆310反向转动时,捕获抓钩组件310可以从展开状态恢复到收缩状态。
[0166]
丝杆310的下端设置有四个伸缩装置312,本实施例的伸缩装置312是多节伸缩杆,四个伸缩装置312排列成一个矩形。四个伸缩装置312的下端固定在下固定板311上,四个伸缩装置312的上端固定在上固定板313上,电机316的下端固定在支撑板315上,支撑板315与上固定板313之间设置有几个减震器314,本实施例的减震器314为螺旋状的钢丝绳减震器,且每一个减震器314的轴线与伸缩装置312的轴线相互垂直。
[0167]
当飞行器需要降落时,首先,飞行控制系统启动升空平台上的动力装置,例如启动旋翼或者涡扇发动机等,让升空平台上升一定的高度,如上升9米至10米。由于主探管和辅助探管均固定在升空平台上,因此主探管、辅助探管跟随升空平台一并上升。
[0168]
此时,飞行器缓慢的悬停在升空平台上方一定的距离,如悬停在上层平台300上方大约3米至5米处,然后通过升空平台上的辅助定位装置确定飞行器的大约位置,例如在上层平台300上设置摄像头,通过摄像头拍摄飞行器底部的图像,对图像分析后确定飞行器大概的位置。此时,飞行控制系统控制升空平台上的动力装置,使得升空平台移动至飞行器下方合适的位置。
[0169]
然后,在飞行器悬停的情况下,处于收缩状态的捕获抓钩组件310的伸缩装置312逐步上升并且带动四个捕获抓钩330穿过上层平台300的通孔,如图22所示,捕获抓钩330的上端可以越过飞行器的滑撬371。
[0170]
接着,电机316带动丝杆320转动,四个捕获抓钩330从收缩状态转为展开状态,如图23与图24所示,四个捕获抓钩330的钩合部331将钩合在飞行器的滑撬371上,优选的,每
一钩合部331可以钩合在滑撬371与滑撬立柱372的连接处。
[0171]
当四个钩合部331钩合在飞行器的滑撬371后,四个伸缩装置312开始收缩,如图25与图26所示,两根滑撬371分别落入滑撬安装槽301内,这样即实现飞行器与升空平台之间的固定。
[0172]
随后,主拉降绞车、辅助拉降绞车开始转动,收回主拉降索、辅助拉降索,从而带动升空平台下降。这样,飞行器随升空平台一并下降,当升空平台下降到甲板后,即实现飞行器的着舰。
[0173]
当升空平台降落到甲板的瞬间,减震降落架的下端将抵接到甲板的上表面,并且为升空平台提供缓冲的力,避免升空平台硬着陆在甲板上而导致甲板的震动,也避免升空平台上的飞行器剧烈震动。
[0174]
由于海上作业时,海况较为复杂,海浪可能将船体向上抛起,为了避免船体瞬间升高或者下降对升空平台造成冲击,在升空平台下降过程中,升空平台的动力装置始终工作并且提供升力,这样,即使船体被海浪抛起而瞬间升高并导致主拉降索、辅助拉降索无法提供下降的拉力时,由于升空平台的动力装置始终提供升力,此时升空平台也会在升力的作用下迅速升高,从而避免因甲板瞬间升高而冲击升空平台,避免甲板撞击在升空平台上。
[0175]
优选的,为了方便小型飞行器的电池更换,在上层平台300上设置电池更换组件,电池更换组件包括一根滑轨305,滑块306可以在滑轨305上滑动,在滑块306上端设置有可以伸展的机械臂307,机械臂307的上端设置有电池固定架308,电池固定架308可以在机械臂307的带动下上升至机腹370内侧,并且可以抓取、固定飞行器的电池375,当机械臂307缩回后,可以将旧的电池放下,并且将新的电池放置在电池固定架308上,在机械臂307带动电池固定架308上升后,可以将新的电池放置到飞行器内,实现电池的更换。这样,小型飞行器不需要降落甲板上即可以方便的实现电池的更换。
[0176]
第四实施例:
[0177]
本实施例主要是针对滑撬式起落架的飞行器的降落。本实施例的舰船包括有船体,船体上设置有甲板,升空平台设置在甲板上。升空平台包括三层结构,分别是由上而下依次设置的上层平台、动力装置层以及减震层,三层之间通过桁架固定连接。飞行器可以锁紧在上层平台上,随升空平台一起降落在甲板上。上层平台、动力装置层以及减震层的结构与第三实施例相同,在此不再赘述。
[0178]
参见图27,本实施例的上层平台400中设置有通孔,捕获抓钩组件410可以穿过该通孔,捕获抓钩组件410设置有四根捕获抓钩430,本实施例的捕获抓钩组件410与第三实施例相同,不再赘述。
[0179]
与第三实施例不同的是,本实施例并不设置电池更换组件,而是设置加油组件,本实施例的加油组件包括一根滑轨405,滑块406可以在滑轨405上往复移动,滑块406的上端设置有可以伸缩的加油管407,加油管407的上端设置有加油嘴,针对使用航油的飞行器470,可以通过加油组件向飞行器470进行加油。
[0180]
第五实施例:
[0181]
本实施例主要是针对滑撬式起落架的飞行器的降落。本实施例的舰船包括有船体,船体上设置有甲板,升空平台设置在甲板上。升空平台包括三层结构,分别是由上而下依次设置的上层平台、动力装置层以及减震层,三层之间通过桁架固定连接。飞行器可以锁
紧在上层平台上,随升空平台一起降落在甲板上。上层平台、动力装置层以及减震层的结构与第三实施例相同,在此不再赘述。
[0182]
与第三实施例不同的是,伸缩装置与减震器的结构发生变化,如图28与图29所示,伸缩装置510包括多节伸缩杆512,在多节伸缩杆512的上端设置有一根钢缆513,钢缆513的下端固定在多节伸缩杆512上,钢缆513的上端固定在上固定板515上。本实施例的上固定板515可以替换第三实施例的上固定板313。在钢缆513外套装有弹簧514,优选的,弹簧514的上下两端分别固定在多节伸缩杆512、上固定板515上。本实施例弹簧514也是螺旋弹簧,并且轴线与多节伸缩杆512平行,优选的,弹簧514与多节伸缩杆512共轴线设置。
[0183]
第六实施例:
[0184]
本实施例的舰船包括有船体,船体上设置有甲板,升空平台设置在甲板上。升空平台包括三层结构,分别是由上而下依次设置的上层平台、动力装置层以及减震层,三层之间通过桁架固定连接。飞行器可以降落在上层平台上,随升空平台一起降落在甲板上。上层平台、动力装置层以及减震层的结构与第一实施例相同,在此不再赘述。
[0185]
本实施例的上层平台上设置有充电组件,参见图30,在上层平台600设置充电组件,充电组件包括正极板601以及负极板602,正极板601与负极板602之间设置有隔离条605,实现正极板601与负极板602之间的电隔离。正极板601与负极板602分别连接至直流电源的正极端与负极端。
[0186]
飞行器670的两根滑撬671、672分别为充电正极电极以及充电负极电极,当飞行器670降落到上层平台600后,两根滑撬671、672分别降落在正极板601与负极板602的上方,这样,可以实现对飞行器670的充电。
[0187]
可选的方案是,充电组件与拉紧组件在上层平台600上设置在两个相邻的区域,这样,在升空平台降落到甲板后,推动飞行器670在上层平台600上移动一定的距离,将飞行器670推动至充电组件上,从而实现对飞行器的充电。
[0188]
第七实施例:
[0189]
本实施例的舰船包括有船体,船体上设置有甲板,升空平台设置在甲板上。升空平台包括三层结构,分别是由上而下依次设置的上层平台、动力装置层以及减震层,三层之间通过桁架固定连接。飞行器可以降落在上层平台上,随升空平台一起降落在甲板上。上层平台、动力装置层以及减震层的结构与第一实施例相同,在此不再赘述。
[0190]
参见图31,本实施例的上层平台700上设置有转盘降落台710,转盘降落台710可以相对于上层平台700转动,例如在上层平台700的底部设置有旋转电机,通过旋转电机带动转盘降落台710转动。转盘降落台710的下方设置有磁场产生器件(图中不可见),使得转盘降落台710可以产生强力的磁场。另外,上层平台700上还设置有滑轨711,且上层平台700还设置有机械臂组件,机械臂组件包括滑块712,滑块712可以在滑轨711上往复移动。机械臂组件还包括夹持臂713,夹持臂713的固定端铰接在滑块712上,且夹持臂713包括两段相互铰接的夹持杆,夹持臂713的自由端设置有夹持件714,夹持件714位于转盘降落台710的上方。
[0191]
当飞行器770需要降落时,将逐步降落到转盘降落台710,并且在滑撬771距离转盘降落台710一段距离时,磁场产生器件产生磁场并且将飞行器770吸附到转盘降落台710上。当飞行器700降落到转盘降落台710后,通过旋转电机带动转盘降落台710的转动,使得飞行
器770的电池775正对滑轨771的方向。此时,滑块712移动至正对电池775的位置,机械臂713带动夹持件714并夹持飞行器770的电池775,实现电池775的更换。
[0192]
需要说明的是,上述实施例的所有的驱动器件除了使用电机外,也可以使用液压设备、气压设备替代。
[0193]
第八实施例:
[0194]
本实施例主要是针对滑撬式起落架的飞行器的降落。本实施例的舰船包括有船体,船体上设置有甲板,升空平台设置在甲板上。升空平台包括三层结构,分别是由上而下依次设置的上层平台、动力装置层以及减震层,三层之间通过桁架固定连接。飞行器可以锁紧在上层平台上,随升空平台一起降落在甲板上。上层平台、动力装置层以及减震层的结构与第一实施例相同,在此不再赘述。
[0195]
上层平台的上方设置有两条滑撬安装槽,飞行器的每一根滑撬可以分别安装到一条滑撬安装槽内。上层平台的中间位置设置有一个通孔,本实施例的拉紧组件包括可以穿过该通孔的捕获抓钩组件。捕获抓钩组件的下端固定在支撑板上。
[0196]
参见图54至图56,捕获抓钩组件1230包括一根丝杆1233,丝杆1233位于捕获抓钩组件1230的中部,丝杆1233的底部设置有电机,电机可以带动丝杆1233沿自身轴线转动。丝杆1233的顶部设置有固定环1237,固定环1237不能够相对于丝杆1233上下移动。
[0197]
丝杆1233外套装有一个螺母套1236,螺母套1236设置有内螺纹,丝杆1233转动时,螺母套1236可以相对于丝杆1233上下移动。在丝杆1233的周向外设置有四根捕获抓钩1234,每一根捕获抓钩1233的固定端固定在螺母套1236上,连接杆1238连接在固定环1237与捕获抓钩1234杆体的中部。优选的,连接杆1238外套装有一根弹簧1239,弹簧1239作为本实施例的减震器件,其两端分别固定在连接杆1238的两端,以避免捕获抓钩1234展开或者收缩时产生剧烈的震动。在捕获抓钩1234的自由端设置有钩合部1235,与第三实施例不同的是,本实施例中,钩合部1235自捕获抓钩1234的杆体向上弯折。
[0198]
丝杆1234的下端设置有四个伸缩装置1232,本实施例的伸缩装置1232是多节伸缩杆,四个伸缩装置1232排列成一个矩形。四个伸缩装置1232的下端固定在下固定板1231上,四个伸缩装置1232的上端固定在上固定板上,电机的下端固定在支撑板上,支撑板与上固定板之间设置有几个减震器。
[0199]
当飞行器1250需要降落时,首先,飞行控制系统启动升空平台上的动力装置,例如启动旋翼或者涡扇发动机等,让升空平台上升一定的高度,如上升9米至10米。由于主探管和辅助探管均固定在升空平台上,因此主探管、辅助探管跟随升空平台一并上升。
[0200]
此时,飞行器1250缓慢的悬停在升空平台上方一定的距离,如悬停在上层平台上方大约3米至5米处,然后通过升空平台上的辅助定位装置确定飞行器的大约位置,例如在上层平台上设置摄像头,通过摄像头拍摄飞行器底部的图像,对图像分析后确定飞行器1250大概的位置。此时,飞行控制系统控制升空平台上的动力装置,使得升空平台移动至飞行器下方合适的位置。
[0201]
然后,在飞行器1250悬停的情况下,处于收缩状态的捕获抓钩组件1230的伸缩装置1232逐步上升并且带动四个捕获抓钩1234穿过上层平台的通孔,捕获抓钩1234的上端可以越过飞行器的滑撬1252。
[0202]
接着,电机带动丝杆1233转动,四个捕获抓钩1234从收缩状态转为展开状态,如图
55与图56所示,四个捕获抓钩1234的钩合部1235将钩合在飞行器的滑撬1252上,优选的,每一钩合部1235可以钩合在滑撬1252与滑撬立柱1251的连接处。
[0203]
当四个钩合部1235钩合在飞行器的滑撬1252后,四个伸缩装置1232开始收缩,两根滑撬1252分别落入滑撬安装槽内,这样即实现飞行器1250与升空平台之间的固定。
[0204]
随后,主拉降绞车、辅助拉降绞车开始转动,收回主拉降索、辅助拉降索,从而带动升空平台下降。这样,飞行器随升空平台一并下降,当升空平台下降到甲板后,即实现飞行器的着舰。
[0205]
当升空平台降落到甲板的瞬间,减震降落架的下端将抵接到甲板的上表面,并且为升空平台提供缓冲的力,避免升空平台硬着陆在甲板上而导致甲板的震动,也避免升空平台上的飞行器剧烈震动。
[0206]
由于海上作业时,海况较为复杂,海浪可能将船体向上抛起,为了避免船体瞬间升高或者下降对升空平台造成冲击,在升空平台下降过程中,升空平台的动力装置始终工作并且提供升力,这样,即使船体被海浪抛起而瞬间升高并导致主拉降索、辅助拉降索无法提供下降的拉力时,由于升空平台的动力装置始终提供升力,此时升空平台也会在升力的作用下迅速升高,从而避免因甲板瞬间升高而冲击升空平台,避免甲板撞击在升空平台上。
[0207]
上述实施例中,可以使用液压装置或者气压装置替代丝杆1233与螺母套1236的结构。
[0208]
动力装置变化方式:
[0209]
本实用新型的升空平台包括位于中间的动力装置层,动力装置层包括旋翼安装架以及涡扇发动机安装架,对于旋翼安装架以及涡扇发动机安装架的布局,可以有多种不同的布置方式。
[0210]
参见图32,第一种布置方式是设置四个旋翼安装架1003以及四个涡扇发动机安装架1002,四个旋翼安装架1003与四个涡扇发动机安装架1002之间通过桁架1004连接,上层平台1001位于动力装置层的上方,并且通过桁架与动力装置层固定。从图32可见,四个涡扇发动机安装架1002设置在靠近上层平台1001的一侧,而四个旋翼安装架1003设置在远离上层平台1001的一侧。且一个旋翼安装架1003与一个涡扇发动机安装架1002对应,四个旋翼安装架1003分别位于上层平台1001的四个角外侧,四个涡扇发动机安装架1002分别位于上层平台1001的四个角外侧。
[0211]
参见图33,第二种布置方式是设置四个旋翼安装架1012以及四个涡扇发动机安装架1013,四个旋翼安装架1012、四个涡扇发动机安装架1013与上层平台1011之间通过桁架1014连接,上层平台1011位于动力装置层的上方,并且通过桁架与动力装置层固定。从图33可见,四个涡扇发动机安装架1013设置在靠近上层平台1011的一侧,而四个旋翼安装架1012设置在距离上层平台1012的位置。本实施例中,四个旋翼安装架1012分别位于上层平台1011的四个角外侧,四个涡扇发动机安装架1013分别位于上层平台1011的四条边的外侧。
[0212]
当然,另一种方式是,四个旋翼安装架位于上层平台四条边的外侧,而四个涡扇发动机安装架分别位于上层平台四个角的外侧。
[0213]
参见图34,第三种布置方式是设置四个旋翼安装架1022以及三个涡扇发动机安装架1023,四个旋翼安装架1022、三个涡扇发动机安装架1023与上层平台1021之间通过桁架
1024连接,上层平台1021位于动力装置层的上方,并且通过桁架与动力装置层固定。从图34可见,四个涡扇发动机安装架1023与上层平台1021的距离较短,而三个旋翼安装架1022与上层平台1012的距离较长。本实施例中,四个旋翼安装架1022分别位于上层平台1021的四个角外侧,三个涡扇发动机安装架1023均位于上层平台1021的四条边的外侧,优选的,呈等边三角形的方式布置。
[0214]
参见图35,第四种布置方式是设置四个旋翼安装架1032以及两个涡扇发动机安装架1033,四个旋翼安装架1032、两个涡扇发动机安装架1033与上层平台1031之间通过桁架1034连接,上层平台1031位于动力装置层的上方,并且通过桁架与动力装置层固定。本实施例中,四个旋翼安装架1032分别位于上层平台1031的四个角外侧,两个涡扇发动机安装架1033均位于上层平台1031的两条边的外侧并对称设置。
[0215]
参见图36,第五种布置方式是设置四个旋翼安装架1042以及两个涡扇发动机安装架1043,四个旋翼安装架1042、两个涡扇发动机安装架1043与上层平台1041之间通过桁架1044连接,上层平台1041位于动力装置层的上方,并且通过桁架与动力装置层固定。本实施例中,四个旋翼安装架1042分别位于上层平台1041四条边的外侧,两个涡扇发动机安装架1043均位于上层平台1041一条对角线的外侧。
[0216]
参见图37,第六种布置方式是设置四个旋翼安装架1052以及两个涡扇发动机安装架1053,四个旋翼安装架1052、两个涡扇发动机安装架1053与上层平台1051之间通过桁架1054连接,上层平台1051位于动力装置层的上方,并且通过桁架与动力装置层固定。本实施例中,四个旋翼安装架1052分别位于上层平台1051四条边的外侧,且距离上层平台1051的距离较远,两个涡扇发动机安装架1053均位于上层平台1051两条边的外侧且对称布置,因此,涡扇发动机安装架1053与上层平台1051之间的距离较短。
[0217]
参见图38,第七种布置方式是仅仅设置四个旋翼安装架1062,并不设置涡扇发动机安装架,四个旋翼安装架1062与上层平台1061之间通过桁架1064连接,上层平台1061位于动力装置层的上方,并且通过桁架与动力装置层固定。本实施例中,四个旋翼安装架1062分别位于上层平台1061四个角的外侧。
[0218]
参见图39,第八种布置方式是仅仅设置四个旋翼安装架1072,并不设置涡扇发动机安装架,四个旋翼安装架1072与上层平台1071之间通过桁架1074连接,上层平台1071位于动力装置层的上方,并且通过桁架与动力装置层固定。本实施例中,四个旋翼安装架1072分别位于上层平台1071四条边的外侧。
[0219]
参见图40,第九种布置方式是设置四个旋翼安装架1082以及三个涡扇发动机安装架1083,四个旋翼安装架1082、三个涡扇发动机安装架1083与上层平台1081之间通过桁架1084连接,上层平台1081位于动力装置层的上方,并且通过桁架与动力装置层固定。从图40可见,四个涡扇发动机安装架1083与上层平台1081的距离较短,而三个旋翼安装架1082与上层平台1081的距离较长。本实施例中,四个旋翼安装架1082分别位于上层平台1081的四条边的外侧,三个涡扇发动机安装架1083呈等边三角形的方式布置,且其中一个涡扇发动机安装架1083与其中一个旋翼安装架1082在同一直线上。
[0220]
参见图41,第十种布置方式是设置四个旋翼安装架1092以及一个涡扇发动机安装架1091,涡扇发动机安装架1091位于正中间,四个旋翼安装架1092分别位于涡扇发动机安装架1091的四个角落上,并且成矩形布置。每一个旋翼安装架1092均通过桁架与涡扇发动
机安装架1091连接。并且,上层平台可以位于动力装置层的上方,并且通过桁架固定连接。
[0221]
此外,上述实施例中,动力装置各种布局中,涡扇发动机安装架可以修改为旋翼安装架,即动力装置均为旋翼,且旋翼的设置位置可以还有更多的设置方式,例如多个旋翼可以是在垂直方向上上下设置。涡扇发动机进气口设置导流罩改变进口方向等。
[0222]
当然,上述实施例中,旋翼的轴线都是垂直于上层平台,实际应用时,可以增加轴线与上层平台平行的旋翼,轴线与上层平台平行的旋翼的数量以及设置位置可以根据需要调整,这样更有利于对升空平台飞行方向的控制。
[0223]
当然,上述的方案只是本实用新型优选的实施方案,实际应用是还可以有更多的变化,例如,用于夹持飞行器前轮或者后轮的机构的变化,或者,动力装置层各种动力装置布置位置的改变,又或者减震降落架具体结构的改变等,这些改变都不影响本实用新型的实施,也应该包括在本实用新型的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 绞车

 热门咨询
热门咨询




tips