
 商标分类
商标分类  商标转让
商标转让 
一种自由边界模拟支撑模块的制作方法
 2021-02-13 00:02:43|
2021-02-13 00:02:43| 255|
255| 起点商标网
起点商标网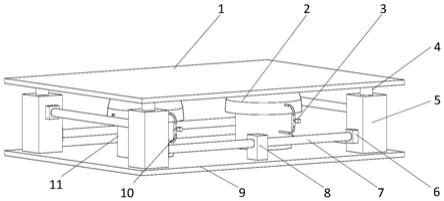
[0001]
本发明涉及一种自由边界模拟支撑模块,属于模态分析领域。
背景技术:
[0002]
模态分析技术已经广泛应用于多个工程领域,作为提高结构动特性、振动和噪声控制以及故障诊断等问题的重要工具。在进行模态试验中,试验产品的边界条件模拟是准确获取模态参数的关键因素,而在航空航天领域中,很多试验产品在空中的工作状态处于自由边界状态,因此这类结构的模态试验要求实现其自由边界模拟。要达到完全自由的边界约束状态基本无法实现,因此试验中通常采用柔软支撑,如橡皮绳悬挂、弹簧悬挂、气囊或者空气弹簧支撑等等,以尽可能降低边界支撑刚度带来的影响。
[0003]
采用橡皮绳或者弹簧等柔性机构悬挂时,通常需要额外的承载支撑架,对于大型产品甚至需要建设特殊结构的振动塔,其通用性较差,并且实现成本较高。近几年研究人员逐渐使用柔性支撑替代柔性悬挂,包括气囊支撑、空气弹簧支撑等,目前的柔性支撑方案均要求气囊或空气弹簧平稳地将试验产品自由浮起一定的高度,并稳定支撑,从而达到自由边界模拟的目的,但是此种方法存在自由浮起过程安全性差,多气囊/空气弹簧浮起过程耦合严重以及控制方法复杂等缺点。
技术实现要素:
[0004]
(一)要解决的技术问题
[0005]
针对现有技术中的上述不足和需求,本发明提出一种自由边界模拟支撑模块,其在试验前后采用升降机构组件实现试验产品的升降,试验过程中采用柔性支撑组件支撑试验产品,一方面实现了模态试验所需要的自由边界模拟,另一方面采用机械结构同步升降解决了目前柔性支撑组件升降安全性差、多柔性支撑浮起过程存在耦合以及其控制方法复杂等问题。该自由边界模拟支撑模块提高了柔性支撑的稳定可靠性,并作为模块化的产品,具有很强的通用性,适合组合使用。
[0006]
(二)技术方案
[0007]
一种自由边界模拟支撑模块,其特征在于,包括端板组件、升降机构组件、柔性支撑组件、控制组件;其中,所述端板组件包括上端板和下端板,下端板用于固定所述自由边界模拟支撑模块,上端板用于连接试验产品;所述升降机构组件包括驱动电机、传动轴、齿轮转向器、丝杠、立柱;若干立柱固定设置于下端板上,所述立柱上均通过各自的丝杠连接至上端板的下端面,其中两相邻立柱之间设置驱动电机,所述驱动电机两输出端通过相应传动轴传输动力至相应立柱上的齿轮转向器,所述齿轮转向器连通至相应立柱内部并与相应的丝杠传动连接;彼此相邻的立柱之间均设置传动轴和齿轮转向器以获得驱动电机的动力,实现若干立柱上相应丝杠的同步升降,以实现上端板的升降动作,其中,所述丝杠上端以及所述立柱上端均不与所述上端板固定连接;所述上端板和下端板之间、若干立柱围成空间内设置柔性支撑组件。
[0008]
所述柔性支撑组件包括气囊、附加气室、连接气管、节流调节器;所述气囊上端与所述上端板的下端面连接,所述气囊设置于所述附加气室上方,所述气囊与所述附加气室通过所述连接气管进行连通,节流调节器安装在连接气管上,并可实现所述气囊与所述附加气室的通断控制。
[0009]
所述柔性支撑组件设置为若干个,且均布设置。
[0010]
所述控制组件包括相应传感器和控制器。
[0011]
所述传感器包括力传感器;所述力传感器设置于所述立柱与所述上端板之间用以测量二者之间的接触力。
[0012]
端板组件具有足够的强度和刚度,以保证其承载能力。
[0013]
升降机构组件中,驱动电机用于提供升降机构组件的动力;传动轴用于连接驱动电机和丝杠;齿轮转向器用于改变传动轴的驱动旋转方向,从而实现丝杠的上下运行;丝杠用于实现升降功能,完成上端板的升起或下降;立柱用于固定丝杠以及试验开始前或结束后支撑试验产品。
[0014]
柔性支撑组件中,气囊用于模态试验过程中向试验产品提供支撑,以模拟试验产品所处的自由-自由边界状态;附加气室用于扩展气囊体积,降低系统的支撑频率;连接气管用于接通气囊与附加气室;节流调节器安装于连接气管上,用于气囊与附加气室的通断,并可实现节流阻尼的调节。
[0015]
控制组件用于自由边界模拟支撑模块的整体控制,以实现试验开始前试验产品平稳地悬浮于柔性支撑组件上以及试验结束后试验产品平稳的回落至支撑立柱上,保证整体系统的安全可靠。
[0016]
一种自由边界模拟支撑模块的使用方法,包括以下步骤:
[0017]
s1.试验开始前,将试验产品固定于上端板上,并由立柱支撑,此时柔性支撑组件未充气;
[0018]
s2.试验准备时,根据试验产品的高度,控制组件控制启动驱动电机,并驱动升降机构组件支撑上端板上升到达目标位置,随后,控制组件控制气源的输气管路上的电动阀门,向柔性支撑组件内部进行充气直到到达目标压力,同时监测升降机构组件与上端板接触位置的力传感器的反馈值,根据各支撑点残余支撑力分配,对柔性支撑组件的充气压力进行微调,使各支撑点残余支撑力达到一致,而后,关闭电动阀门;
[0019]
s3.试验开始,控制组件再次控制启动驱动电机,驱动升降机构组件缓慢下降一定的高度,此时,试验产品连同上端板完全由柔性支撑组件进行支撑,此时由于试验产品重力的原因,上端板连同柔性支撑组件被压向下运动,由于柔性支撑组件中的气囊具有可压缩的特性,因此试验产品的重力与柔性支撑组件的支撑迅速达到新的平衡,实现对试验产品的柔性悬浮支撑;
[0020]
s4.试验结束后,控制组件控制启动驱动电机,驱动升降机构组件上升支撑上端板,随后,控制电动阀门对柔性支撑组件进行排气,此时,试验产品连同上端板完全由升降机构组件支撑,控制组件控制驱动电机,实现驱动升降机构下降至试验开始前立柱完全支撑状态。
[0021]
(三)有益效果
[0022]
本发明的一种自由边界模拟支撑模块,在试验前后采用升降机构组件实现试验产
品的升降,试验过程中采用柔性支撑组件支撑试验产品,一方面实现了模态试验所需要的自由边界模拟,另一方面采用机械结构同步升降解决了目前柔性支撑组件升降安全性差、多柔性支撑浮起过程存在耦合以及其控制方法复杂等问题。该自由边界模拟支撑模块提高了柔性支撑的稳定可靠性,并作为模块化的产品,具有很强的通用性,适合组合使用。
附图说明
[0023]
图1本发明的一种自由边界模拟支撑模块立体结构图。
[0024]
图2本发明的一种自由边界模拟支撑模块工作原理图。
[0025]
图中,1-上端板;2-气囊;3-节流调节器;4-丝杠;5-立柱;6-齿轮转向器;7-传动轴;8-驱动电机;9-下端板;10-连接气管;11-附加气室;12-柔性支撑组件;13-升降机构组件;14-控制组件;15-气源。
具体实施方式
[0026]
参见图1:
[0027]
本发明的一种自由边界模拟支撑模块,包括端板组件、升降机构组件13、柔性支撑组件12、控制组件14;其中,所述端板组件包括上端板1和下端板9,下端板9用于固定所述自由边界模拟支撑模块,上端板1用于连接试验产品;所述升降机构组件13包括驱动电机8、传动轴7、齿轮转向器6、丝杠4、立柱5;若干立柱5固定设置于下端板6上,所述立柱5上均通过各自的丝杠4连接至上端板1的下端面,其中两相邻立柱5之间设置驱动电机8,所述驱动电机8两输出端通过相应传动轴7传输动力至相应立柱5上的齿轮转向器6,所述齿轮转向器6连通至相应立柱5内部并与相应的丝杠4传动连接;彼此相邻的立柱5之间均设置传动轴7和齿轮转向器6以获得驱动电机8的动力,实现若干立柱7上相应丝杠4的同步升降,以实现上端板1的升降动作,其中,所述丝杠4上端以及所述立柱5上端均不与所述上端板1固定连接;所述上端板1和下端板9之间、若干立柱5围成空间内设置柔性支撑组件12。
[0028]
所述柔性支撑组件12包括气囊2、附加气室11、连接气管10、节流调节器3;所述气囊2上端与所述上端板1的下端面连接,所述气囊2设置于所述附加气室11上方,所述气囊2与所述附加气室11通过所述连接气管10进行连通,节流调节器3安装在连接气管10上,并可实现所述气囊2与所述附加气室11的通断控制。
[0029]
所述柔性支撑组件12设置为若干个,且均布设置。
[0030]
所述控制组件14包括相应传感器和控制器。
[0031]
所述传感器包括力传感器。
[0032]
所述力传感器设置于所述立柱5与所述上端板1之间用以测量二者之间的接触力。
[0033]
端板组件具有足够的强度和刚度,以保证其承载能力。
[0034]
升降机构组件13中,驱动电机8用于提供升降机构组件13的动力;传动轴7用于连接驱动电机8和丝杠4;齿轮转向器6用于改变传动轴7的驱动旋转方向,从而实现丝杠4的上下运行;丝杠4用于实现升降功能,完成上端板1的升起或下降;立柱5用于固定丝杠4以及试验开始前或结束后支撑试验产品;
[0035]
柔性支撑组件12中,气囊2用于模态试验过程中向试验产品提供支撑,以模拟试验产品所处的自由-自由边界状态;附加气室11用于扩展气囊2体积,降低系统的支撑频率;连
接气管10用于接通气囊2与附加气室11;节流调节器3安装于连接气管11上,用于气囊2与附加气室11的通断,并可实现节流阻尼的调节。
[0036]
控制组件14用于自由边界模拟支撑模块的整体控制,以实现试验开始前试验产品平稳地悬浮于柔性支撑组件12上以及试验结束后试验产品平稳的回落至支撑立柱5上,保证整体系统的安全可靠。
[0037]
参见图2:
[0038]
一种自由边界模拟支撑模块的使用方法,包括以下步骤:
[0039]
s1.试验开始前,将试验产品固定于上端板1上,并由立柱5支撑,此时柔性支撑组件12未充气;
[0040]
s2.试验准备时,根据试验产品的高度,控制组件14控制启动驱动电机8,并驱动升降机构组件13支撑上端板1上升到达目标位置,随后,控制组件14控制气源15的输气管路上的电动阀门,向柔性支撑组件12内部进行充气直到到达目标压力,同时监测升降机构组件13与上端板1接触位置的力传感器的反馈值,根据各支撑点残余支撑力分配,对柔性支撑组件12的充气压力进行微调,使各支撑点残余支撑力达到一致,而后,关闭电动阀门;
[0041]
s3.试验开始,控制组件14再次控制启动驱动电机8,驱动升降机构组件13缓慢下降一定的高度,此时,试验产品连同上端板1完全由柔性支撑组件12进行支撑,此时由于试验产品重力的原因,上端板1连同柔性支撑组件12被压向下运动,由于柔性支撑组件12中的气囊2具有可压缩的特性,因此试验产品的重力与柔性支撑组件12的支撑迅速达到新的平衡,实现对试验产品的柔性悬浮支撑;
[0042]
s4.试验结束后,控制组件14控制启动驱动电机8,驱动升降机构组件13上升支撑上端板1,随后,控制电动阀门对柔性支撑组件12进行排气,此时,试验产品连同上端板1完全由升降机构组件13支撑,控制组件14控制驱动电机8,实现驱动升降机构10下降至试验开始前立柱完全支撑状态。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips