
 商标分类
商标分类  商标转让
商标转让 
一种手柄式无人机的制作方法
 2021-02-13 00:02:12|
2021-02-13 00:02:12| 371|
371| 起点商标网
起点商标网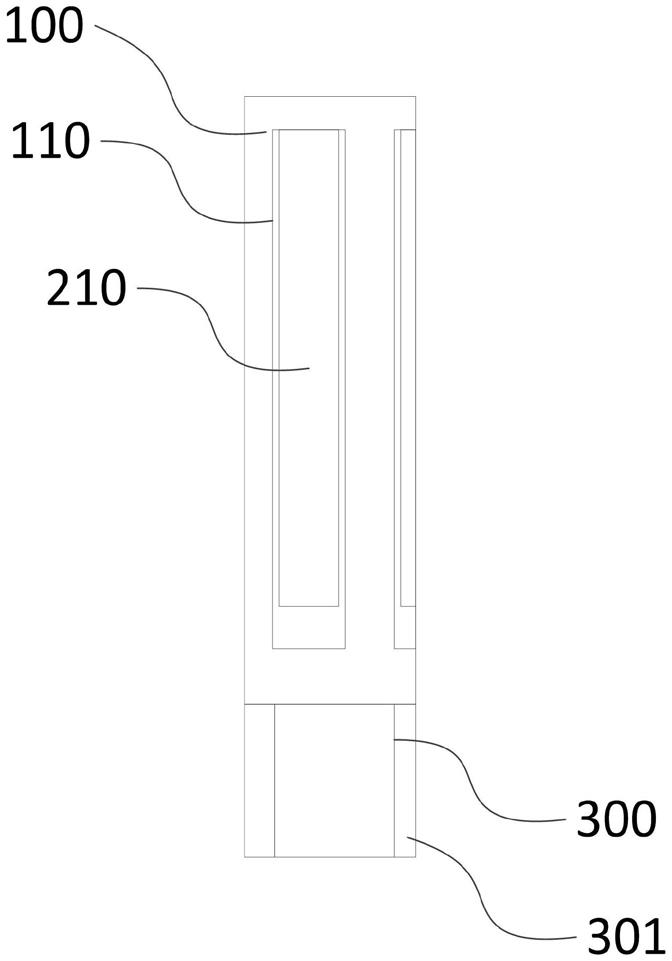
[0001]
本实用新型涉及无人机领域,具体涉及一种手柄式无人机。
背景技术:
[0002]
无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
[0003]
但是,现有的无人机体积较大,不便于携带。
[0004]
以及,单纯作为无人机使用,适用环境少,不利于用户体验。
技术实现要素:
[0005]
本实用新型要解决的技术问题在于,针对现有技术的上述缺陷,提供一种无人机,解决现有无人机体积较大的问题,以及现有无人机体适用环境少,不利于用户体验的问题。
[0006]
本实用新型解决其技术问题所采用的技术方案是:提供一种手柄式无人机,所述手柄式无人机包括手柄主体,以及至少三个与手柄主体铰接的飞翼杆,以及设置在手柄主体底部且可合拢/展开的三脚架,所述飞翼杆与手柄主体之间设置有固定机构,以固定展开的飞翼杆,所述飞翼杆的端部包括驱动机构和与驱动机构连接且可合拢/展开的飞翼。
[0007]
其中,较佳方案是:所述手柄主体的表面设置有容纳飞翼杆的凹槽,所述凹槽的一端与飞翼杆铰接,所述手柄主体在凹槽的另一端设有容纳飞翼的空腔。
[0008]
其中,较佳方案是:所述飞翼设有多片,并可旋转收纳于飞翼杆的一侧。
[0009]
其中,较佳方案是:所述驱动机构包括驱动马达,所述驱动马达的转动杆与飞翼连接。
[0010]
其中,较佳方案是:所述驱动机构包括转向齿轮/转向齿轮组和转动杆,所述转向齿轮/转向齿轮组带动转动杆转动,所述转动杆与飞翼连接。
[0011]
其中,较佳方案是:所述手柄主体上设有驱动马达和传动杆,所述传动杆与转向齿轮/转向齿轮组转动连接,并带动转向齿轮/转向齿轮组转动。
[0012]
其中,较佳方案是:所述三脚架包括多个支脚,所述支脚与手柄主体的底部铰接,所述支脚合拢后形成手柄结构。
[0013]
其中,较佳方案是:所述手柄主体的底部还设有多个伸缩机构,所述伸缩机构的伸缩杆分别与对应的支脚内侧连接,带动支脚合拢或展开。
[0014]
其中,较佳方案是:所述柄主体的顶部设有一摄像机构。
[0015]
其中,较佳方案是:所述摄像机构与手柄主体的顶部之间设有伸缩杆。
[0016]
本实用新型的有益效果在于,与现有技术相比,本实用新型通过设计一种手柄式无人机,解决现有无人机体积较大的问题,同时可作为自拍杆使用,适用不同的场景;进一步地,飞翼杆铰接设置在手柄主体上,优化无人机结构,使无人机便于携带,形成手柄状;进一步地,脚架可展开设置在手柄主体上,在无人机展开时便于无人机站立,也可实现立地自拍,也可在收纳时形成柄部,便于手持。
附图说明
[0017]
下面将结合附图及实施例对本实用新型作进一步说明,附图中:
[0018]
图1是本实用新型合拢状态手柄式无人机的结构示意图;
[0019]
图2是本实用新型展开状态手柄式无人机的正面结构示意图;
[0020]
图3是本实用新型展开状态手柄式无人机的俯视结构示意图;
[0021]
图4是本实用新型带有摄像机构的手柄式无人机的结构示意图;
[0022]
图5是图4展开摄像机构的结构示意图。
具体实施方式
[0023]
现结合附图,对本实用新型的较佳实施例作详细说明。
[0024]
如图1至图5所示,本实用新型提供一种手柄式无人机的优选实施例。
[0025]
一种手柄式无人机,所述手柄式无人机包括手柄主体100,以及至少三个与手柄主体100铰接的飞翼杆210,以及设置在手柄主体100底部且可合拢/ 展开的三脚架300,所述飞翼杆210与手柄主体100之间设置有固定机构,以固定展开的飞翼杆210,所述飞翼杆210的端部包括驱动机构和与驱动机构连接且可合拢/展开的飞翼。
[0026]
具体地,手柄主体100作为无人机的主体部分,飞翼杆210和三脚架300 均设置在手柄主体100上,在合拢时,飞翼和三脚架300均收合至手柄主体 100上,以形成一个便携式手柄,便于携带;在展开时,飞翼和三脚架300分别相对于手柄主体100展开,如参考图3,飞翼展开形成飞行模式,进入飞行状态,同时,三脚架300展开使手柄主体100可支撑站立在地面上,实现垂直上升飞行。
[0027]
其中,三脚架300包括多个脚架301,分别与手柄主体100的底部铰接。
[0028]
优选地,飞翼杆210翻转至90
°
实现飞翼杆210与手柄主体100的垂直,后合拢形成一呈手柄状的柄部,当然翻转角度可以为其他角度。
[0029]
在本实施例中,并参考图1和2,所述手柄主体100的表面设置有容纳飞翼杆210的凹槽110,所述凹槽110的一端与飞翼杆210铰接,所述手柄主体 100在凹槽110的另一端设有容纳飞翼230的空腔。飞翼杆210合拢至凹槽110 后,手柄主体100表面平整,适于手持,便于便携式携带;同时,飞翼杆210 的表面和手柄主体100的表面一同形成合拢后手持手柄的表面。完善柄部表面形状,提高握持舒适度。
[0030]
进一步地,所述飞翼230设有多片,并可旋转收纳于飞翼杆210的一侧。同时,飞翼230展开时,作为飞行机翼,形成向上的飞行气流,当收合至飞翼杆210端部过后,一同收纳在凹槽110在中。在飞翼230转动时,由于惯性使飞翼230绕着飞翼杆210端部展开,飞翼230可以包括两个或两个以上。
[0031]
在本实施例中,并参考图2,所述驱动机构包括驱动马达,所述驱动马达的转动杆与飞翼230连接。驱动马达设置在飞翼杆210的端部,隐藏式设置,也可非隐藏式设置,并且凹槽110对应位置具有容纳驱动马达的空间。
[0032]
优选地,所述驱动机构包括转向齿轮/转向齿轮组和转动杆220,所述转向齿轮/转向齿轮组带动转动杆220转动,所述转动杆220与飞翼230连接。通过转向齿轮/转向齿轮组和转动杆220的配合,将驱动马达的动力传输至飞翼230上,可将驱动马达设置在飞翼杆210的其他位置,甚至设置在手柄主体 100上,不仅避免飞翼杆210过重,也可以提高隐蔽性,更
美观,也可以实现紧凑型设置。
[0033]
进一步地,所述手柄主体100上设有驱动马达和传动杆,所述传动杆与转向齿轮/转向齿轮组转动连接,并带动转向齿轮/转向齿轮组转动。
[0034]
在本实施例中,并参考图1和2,所述三脚架300包括多个支脚,所述支教与手柄主体100的底部铰接,所述支脚合拢后形成手柄结构。
[0035]
优选地,所述手柄主体100的底部还设有多个伸缩机构,所述伸缩机构的伸缩杆分别与对应的支脚内侧连接,带动支脚合拢或展开。
[0036]
在本实施例中,并参考图4和图5,所述柄主体的顶部设有一摄像机构400。通过摄像机构400,优选为摄像头,实现无人机的飞行拍摄,同时在作为手柄使用时,可以形成自拍杆,实现双模式拍摄(无人机模式和自拍杆模式)。
[0037]
其中,摄像机构400包括相机架和设置在相机架两侧的全景相机,所述全景相机的水平摄像范围大于180度,以及两个所述全景相机的水平摄像范围相交以构成360度全景拍摄。进一步地,相机架包括两凹台,使摄像机构400 的最外侧面与手柄主体100的最外侧面不处于同一平面上,便于对全景相机的镜头保护。
[0038]
进一步地,所述摄像机构400与手柄主体100的顶部之间设有伸缩杆500,实现摄像机构400与手柄主体100的支离设置,实现远程自拍功能。设置伸缩杆500可采用多种方式设置,包括现有伸缩杆500的设置方式,均属于本实用新型的保护范围,在此不一一提供对应附图;以及,设置转动结构使摄像头通过转动结构绕着伸缩杆500翻可采用多种方式设置,包括现有转动结构的设置方式,均属于本实用新型的保护范围,在此不一一提供对应附图。
[0039]
以及,配合三脚架300使用,展开后的三脚架300配合展开的伸缩杆500,实现立地自拍功能。
[0040]
同时,采用重叠覆盖相交的部分进行画面拼接,采用图像拼接技术,将两张具有重叠部分的图像拼成一幅大型的无缝高分辨率图像。其中,图像配准和图像融合是图像拼接的两个关键技术,一般来说,图像拼接主要包括以下五步:图像预处理(包括数字图像处理的基本操作,如去噪、边缘提取、直方图处理等,建立图像的匹配模板以及对图像进行某种变换,如傅里叶变换、小波变换等;图像配准(就是采用一定的匹配策略,找出待拼接图像中的模板或特征点在参考图像中对应的位置,进而确定两幅图像之间的变换关系);建立变换模型(根据模板或者图像特征之间的对应关系,计算出数学模型中的各参数值, 从而建立两幅图像的数学变换模型);统一坐标变换(根据建立的数学转换模型,将待拼接图像转换到参考图像的坐标系中,完成统一坐标变换);融合重构 (将待拼接图像的重合区域进行融合得到拼接重构的平滑无缝全景图像)。
[0041]
进一步地,摄像机构400可通过接头上的控制线发送的控制信号进行拍摄,并通过接头上的数据线进行数据传输,上述操作均可通过移动设备实现,移动设备优选为手机、平板等设备。
[0042]
以上所述者,仅为本实用新型最佳实施例而已,并非用于限制本实用新型的范围,凡依本实用新型申请专利范围所作的等效变化或修饰,皆为本实用新型所涵盖。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips