
 商标分类
商标分类  商标转让
商标转让 
一种基于快递接收柜的多旋翼快递无人机的制作方法
 2021-02-12 23:02:58|
2021-02-12 23:02:58| 204|
204| 起点商标网
起点商标网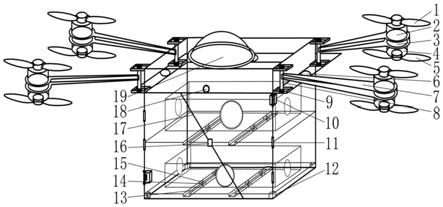
[0001]
本发明涉及无人机技术领域,具体为一种基于快递接收柜的多旋翼快递无人机。
背景技术:
[0002]
目前,无人机作为新型的飞行工具而逐渐被用于快递行业。现有一些专利文献提出了快递无人机的不同设计。这些设计很好地解决了无人机装载快递包裹的数量、快递在无人机输送过程中的固定、包裹投递的准确率等问题。但未具体详细的阐明无人机自身最大可载重多少快递、无人机在向接收柜投递快递时机翼是否会受到接收柜的影响、易碎易损的快递在投递的时候是否会受到损坏、快递在无人机输送下是否做到运输过程信息保密、无人机在向接收柜投递快递时自身的稳定性等相关技术。
技术实现要素:
[0003]
本发明的目的是针对现有技术的不足,提供一种基于快递接收柜的多旋翼快递无人机,该多旋翼快递无人机不仅可以避免在靠近快递接收柜时机翼受到接收柜的影响而损坏;而且,无人机在靠近快递接收柜时,可与快递接收柜组成一稳定保护框架,而向接收柜传递快递箱时又可搭建一遮蔽通道并以水平方式输送快递箱,从而便于保护快递箱内的货物。
[0004]
为了实现上述目的,本发明采用了如下技术方案:
[0005]
一种基于快递接收柜的多旋翼快递无人机,包括多旋翼无人机的主体结构,其特征在于,所述的无人机的机翼中包含有一对可水平旋转45度角的机翼,各机翼的端部都装有上下两台旋翼电机及两部螺旋桨,在机身的围板上开有三个固定孔,在机身的前部装有红外发射器,机身的顶部装有可360度旋转的摄像头,无人机的机身主体下部连接着快递装载箱,快递装载箱的前面带有自动门,箱内带有u型槽导轨、滑轮及滑轮固定装置,箱底带有微型减震器。
[0006]
所述的可水平旋转45度角的机翼包括动力组件和传动组件,所述的动力组件包括机翼角度调节电机、旋翼电机和螺旋桨、电子调速器、逆变器和电池;传动组件包括齿轮ⅰ和齿轮ⅱ、转动轴和轴承,所述机翼角度调节电机水平固定于机体内的上部,机翼角度调节电机上装有齿轮ⅰ,齿轮ⅰ与齿轮ⅱ成90度角啮合,齿轮ⅱ装在转动轴上,转动轴通过轴承及轴承座固定在机体上,所述的转动轴上装有机翼;所述的逆变器与机翼角度调节电机连接;装在每个机翼端部的两台旋翼电机互成倒立方向,因而两台电机的转动方向相反,但其螺旋桨的旋转方向相同;电子调速器为旋翼电机供电并控制其转速,电池安装在无人机机身的内部。
[0007]
所述的快递装载箱的自动门为两扇对开的平开门,位于快递装载箱的前部,并通过铰链安装在快递装载箱上,自动门通过电子锁及斜曲柄摇杆机构进行控制;所述的u型槽导轨的宽度和高度与装载物品的快递箱的u型槽导轨尺寸相同,且在快递箱放置在快递装载箱内部时,其快递箱的上部的u型槽导轨及箱体上部同快递装载箱内的u型槽导轨及u型
槽导轨焊接的水平面那留有小部分空隙,所述u型槽导轨高度略高于滑轮,且u型槽导轨的顶端与快递装载箱内部最顶端留有一定距离;所述的滑轮固定装置分别由锁轮机构和传感器组成,所述的锁轮机构由u型槽导轨中开出的长方形槽,再通过两侧槽中伸出的长条形且前端留有半圆形的锁紧块对滑轮进行锁定,所述的内置微型减震器设置于快递装载箱下方的四角夹层处。
[0008]
所述的无人机主体结构还包括飞行控制系统和gps定位装置。
[0009]
优选的,所述的多旋翼无人机采用四旋翼无人机。
[0010]
优选的,所述的四旋翼无人机有两种飞行姿态,一种是四旋翼十字对称飞行姿态,另一种是四旋翼“x”型对称飞行姿态;
[0011]
优选的,所述的机翼角度调节电机选用的是小型三相异步电动机,所述的旋翼电机选用的是无刷电机,其换向装置为半导体开关器件。
[0012]
优选的,所述的电子调速器为带有bec的电子调速器。
[0013]
优选的,所述的转动轴与机翼是由复合材料通过模具浇注而成的。
[0014]
优选的,所述的无人机的载重量为t=45kgf,所述的螺旋桨采用碳素纤维材质型号为4730的螺旋桨。
[0015]
优选的,所述的快递装载箱下端选用硬质泡沫材质的复合材料制作,以替代起落架的安装。
[0016]
优选的,所述的自动门、电子锁、滑轮固定装置、内置减震器、红外发射器均由plc逻辑可编程控制器控制。
[0017]
与现有技术相比,本发明的有益效果是:
[0018]
1.旋翼无人机上的一对机翼可在飞行中转动45度角,使四旋翼无人机呈“x”形飞行姿态,有利于无人机在向快递接收柜输送快递时避免机翼受到快递接收柜的影响而损坏。
[0019]
2.无人机在向接收柜传递快递箱时采用了水平输送方式,有效地避免了无人机在空中自上而下的投递方式给一些易损易碎的快递造成损坏。
[0020]
3.无人机与快递装载箱一体化设计并配备了自动门,有效的保证了快递信息的保密性。
[0021]
4.高效冗余的四轴八桨动力结构设计与飞行姿态智能保护系统的完美配合造就了多旋翼无人机的高稳定性和可靠性。
[0022]
5.无人机上的三个固定孔有效的保证了快递在传输过程中的机身稳定性。
[0023]
6.无人机中的快递装载箱内的u型槽导轨及滑轮固定装置既有利于快递的输送,又有利于快递箱在无人机输送过程中的固定效果。
[0024]
7.无人机快递装载箱内置的减震装置和硬质泡沫材质的底板可替代起落架的作用,减轻了无人机自身的重量。
附图说明
[0025]
图1是本发明的多旋翼快递无人机的整体结构示意图
[0026]
图中:1-上螺旋桨,2-上旋翼电机,3-电子调速器,4-下旋翼电机,5-下螺旋桨,6-固定孔,7-机翼,8-转动轴,9-轴承,10-斜曲柄摇杆机构,11-铰链,12-微型减震器,13-u型
槽导轨,14-滑轮,15-滑轮固定装置,16-电子锁,17-自动门,18-红外发射器,19-360度旋转摄像头。
具体实施方式
[0027]
下面结合附图对本发明的一种基于快递接收柜的多旋翼快递无人机的具体结构作进一步的详细说明。
[0028]
如图1所示,是本发明的多旋翼快递无人机的整体结构示意图。
[0029]
该基于快递接收柜的多旋翼快递无人机,包括多旋翼无人机的主体结构,所述的无人机的机翼7中包含有一对可水平旋转45度角的机翼,各机翼7的端部都装有上下两台电机——上电机2和下电机4及两部螺旋桨——上螺旋桨1和下螺旋桨5,在机身的围板上开有三个固定孔6,在机身的前部装有红外发射器18,机身的顶部装有可360度旋转的摄像头19,无人机的机身主体下部连接着快递装载箱,快递装载箱的前面带有自动门17,箱内带有u型槽导轨13、滑轮14及滑轮固定装置15,箱底带有微型减震器12。
[0030]
所述的可水平旋转45度角的机翼7包括动力组件和传动组件,所述的动力组件包括机翼角度调节电机、上电机2和下电机4、上螺旋桨1和下螺旋桨5、电子调速器3、逆变器和电池;传动组件包括齿轮ⅰ和齿轮ⅱ、转动轴8和轴承9;所述机翼角度调节电机水平固定于机体内的上部,机翼角度调节电机上装有齿轮ⅰ,齿轮ⅰ与齿轮ⅱ成90度啮合,齿轮ⅱ装在转动轴8上,转动轴8通过轴承9及轴承座固定在机体上,所述的转动轴8上装有机翼7;所述的逆变器与机翼角度调节电机连接;装在每个机翼端部的两台电机——上电机2和下电机4互为倒立方向,因而两台电机的转动方向相反,但其螺旋桨1和5的旋转方向相同;电子调速器3为电机2及电机4供电并控制其转速,电池安装在无人机机身的内部。
[0031]
所述的快递装载箱的自动门17为两扇对开的平开门,位于快递装载箱的前部,并通过铰链11安装在快递装载箱上,自动门17通过电子锁16及斜曲柄摇杆机构10进行控制;所述的u型槽导轨13的宽度和高度与装载物品的快递箱的u型槽导轨尺寸相同,且在快递箱放置在快递装载箱内部时,其快递箱的上部的u型槽导轨及箱体上部同快递装载箱内的u型槽导轨13及u型槽导轨13焊接的水平面留有小部分空隙,所述u型槽导轨13的高度略高于滑轮14,且u型槽导轨的顶端与快递装载箱内部最顶端留有一定距离;所述的滑轮固定装置15分别由锁轮机构和传感器组成,所述的锁轮机构由u型槽导轨中开出的长方形槽,再通过两侧槽中伸出的长条形且前端留有半圆形的锁紧块对滑轮14进行锁定,所述的微型减震器12设置于快递装载箱下方的四角夹层处。
[0032]
所述的无人机主体结构还包括飞行控制系统和gps定位装置。
[0033]
优选的,所述的多旋翼无人机采用四旋翼无人机。
[0034]
优选的,所述的四旋翼无人机有两种飞行姿态,一种是四旋翼十字对称飞行姿态,另一种是四旋翼“x”型对称飞行姿态;
[0035]
优选的,所述的机翼角度调节电机选用的是小型三相异步电动机,所述的旋翼电机2和旋翼电机4选用的是无刷电机,其无刷电机的换向装置为半导体开关器件。
[0036]
优选的,所述的电子调速器3为带有bec的电子调速器。
[0037]
优选的,所述的转动轴8与机翼7是由复合材料通过模具浇注而成的。
[0038]
优选的,所述的无人机的载重量为t=45kgf,所述的螺旋桨1和5采用碳素纤维材
质型号为4730的螺旋桨。
[0039]
优选的,所述的快递装载箱下端选用硬质泡沫材质的复合材料制作,以替代起落架的安装。
[0040]
优选的,所述的自动门17、电子锁16、滑轮固定装置15、微型减震器12、红外发射器18均由plc逻辑可编程控制器控制。
[0041]
该基于快递接收柜的多旋翼快递无人机的工作过程是这样的:首先,当快递无人机即将到达gps定位器定位的指定位置时,无人机通过plc控制器给红外发射器18一个执行信号,红外发射器18会向接收柜发射一个特定的红外信号,接收柜也会因此给无人机一个反馈信号。紧接着,根据plc设定的程序,无人机会给机翼角度调节电机的供电逆变器发送信号,供电逆变器开始工作并给机翼角度调节电机供电,机翼角度调节电机开始工作,通过齿轮ⅰ和齿轮ⅱ的啮合带动转动轴8转动,继而带动机翼7转动45度角,所以无人机的前端的一对机翼会呈现在一条直线上,在此转变的过程中,由于无人机采用的高效冗余的四轴八桨动力结构设计,使得无人机在空中变换机翼角度的过程中其稳定性仍然得以保证。
[0042]
接着,当无人机的机翼7的角度调整后且无人机在降落时,无人机的自动门17遵循plc控制器的指令,先自动打开电子锁16,接着自动门17受到由电机驱动的斜曲柄摇杆机构10的作用,自动门17会在空中降落至接收柜的门前而缓慢打开。紧接着,在无人机与地面即将接触时,无人机底部内置的微型减震器12和硬质泡沫材质的底板会充当起落架的作用,有助于无人机稳定的降落及削弱地面对无人机的反弹力。
[0043]
最后,无人机的自动门17同快递接收柜的平开门对接后,此时会有快递接收柜上的遮雨棚上的气缸伸至无人机的三个固定孔6中,以对无人机在传输快递的过程中给予固定,然后,plc控制器会给滑轮固定装置15一个信号,滑轮固定装置15接收到信号后会缩回两侧槽中伸出的长条形且前端留有半圆形的锁紧块对滑轮进行解锁,紧接着,快递接收柜中的伸缩气缸装置伸至快递箱中的孔中,将快递箱顺着u型槽导轨13拉出,此时上面的快递箱则顺着下端的快递箱上设计的u型槽导轨一起在自动门17围成的密闭空间内拉至快递接收柜中。
[0044]
作为优选,为了能使旋转轴8能够旋转45度角,所述的齿轮ⅰ和齿轮ⅱ优选圆柱直齿轮和圆柱斜齿轮,且两齿轮成90度啮合和只能转动1/4圈。
[0045]
作为优选,为了避免无人机的机翼7在向接收柜输送快递的过程中受到影响,所述的可旋转45度角的机翼7优先选择前端一对机翼。
[0046]
作为优选,为了无人机的机翼7、自动门17能够返回,所述的机翼角度调节电机和斜曲柄摇杆机构10的驱动电机优先选择微型三相异步电机。
[0047]
作为优选,为了使无人机与快递接收柜通过自动门17围成的密闭空间更大,所述的自动门17优先选择直角梯形的平开门。
[0048]
作为优选,为了使得无人机在传输快递的过程中得以固定和减少无人机主体的质量,所述的三个固定孔6优先选择尺寸为的孔。
[0049]
与现有技术相比,本发明的有益效果是:
[0050]
1.旋翼无人机上的一对机翼可在飞行中转动45度角,使四旋翼无人机呈“x”形飞行姿态,有利于无人机在向快递接收柜输送快递时避免机翼受到快递接收柜的影响而损坏。
[0051]
2.无人机在向接收柜传递快递箱时采用了水平输送方式,有效地避免了无人机在空中自上而下的投递方式给一些易损易碎的快递造成损坏。
[0052]
3.无人机与快递装载箱一体化设计并配备了自动门,有效的保证了快递信息的保密性。
[0053]
4.高效冗余的四轴八桨动力结构设计与飞行姿态智能保护系统的完美配合造就了多旋翼的高稳定性和可靠性。
[0054]
5.无人机上的三个固定孔有效的保证了快递在传输过程中的机身稳定性。
[0055]
6.无人机中的快递装载箱内的u型槽导轨及滑轮固定装置既有利于快递的输送,又有利于快递箱在无人机输送过程中的固定效果。
[0056]
7.无人机快递装载箱内置的减震装置和硬质泡沫材质的底板可替代起落架的作用,减轻了无人机自身的重量。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips