
 商标分类
商标分类  商标转让
商标转让 
一种混合动力的四涵道载人飞行器的制作方法
 2021-02-12 23:02:59|
2021-02-12 23:02:59| 234|
234| 起点商标网
起点商标网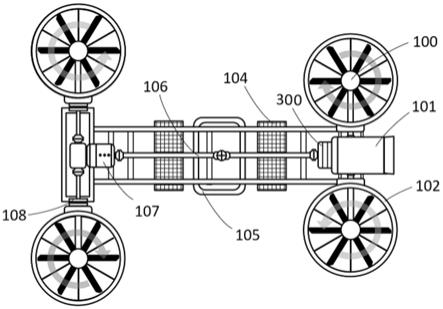
[0001]
本发明涉及一种混合动力的载人飞行器,尤其涉及一种可切换垂起与平飞状态的变桨距四涵道飞行器。
背景技术:
[0002]
目前,市面上成熟的载人飞行器主要有两大类:固定翼和直升机。固定翼作为主流的载人飞行器,需要跑道进行起降,对机场有很大的依赖性。而民用直升机虽然可以垂直起降,对起降环境要求不高,但由于主旋翼结构复杂,操纵相对困难,维护成本也较为高昂。
[0003]
而近年来随着电动多旋翼无人机的崛起以及轻量化材料的广泛应用,加上现如今城市堵车愈加严重,很多公司又重新开启了“飞行汽车”的研究,希望创造出成本低且便于使用的新型载人飞行器,开启城市三维交通新局面。当前众多的飞行汽车项目主要类型分为以下几类:折叠翼短程起降、多旋翼飞行器、固定翼垂直起降、单发自旋翼飞行器、倾斜轴多旋翼飞行器。
[0004]
其中,折叠翼短程起降飞行器和单发自旋翼飞行器依然需要跑道起降。而多旋翼飞行器则多采用电驱动,多个小螺旋桨的形式。但由于锂聚合物电池的能量密度比较低,导致这类飞行器续航时间短,且载重能力小。如果要同时实现大载重和长续航两个特点,则需要更改动力系统。燃油的能量密度要比锂聚合物电池的能量密度高出很多倍,所以目前也出现了一些燃油驱动的多旋翼飞行器或者油转电的混合动力多旋翼飞行器,发动机普遍采用的是活塞式的发动机。但活塞式发动机的振动大,导致这些燃油驱动系统或者油转电的多旋翼飞行器振动大,噪音大,实际飞行表现还有待大幅提高。
技术实现要素:
[0005]
为了克服现有燃油驱动型多旋翼飞行器自重大、振动大的问题,以及电驱动多旋翼飞行器在航时和载重方面的不足。本发明提供了一种混合动力的四涵道载人飞行器,使之具有更大的载重能力和更长的续航时间,自重、尺寸和振动都可得到大幅减小。
[0006]
根据本发明的一方面,一种混合动力的四涵道载人飞行器,包括主机身框架、设在主机身框架上的混合动力驱动系统,混合动力驱动系统包括带燃油箱的涡轮轴发动机及与涡轮轴发动机动力输出端连接的第一速齿轮箱,涡轮轴发动机位于主机身框架右侧中间位置,燃油箱与涡轮轴发动机一体式设置;
[0007]
发电机,连接在涡轮轴发动机的动力输出端,置于涡轮轴发动机的一侧;
[0008]
电池组,与发电机稳压端线路连接,位于主机身框架上,由涡轮轴发动机将化学能转为动能,再带动发电机将动能转为电能,储存在电池组内;
[0009]
电动机动力总成,通过一传动轴与涡轮轴发动机离合式连接;
[0010]
其中电动机动力总成包括两个变桨距双涵道风扇、电动机、第二减速齿轮箱,两个变桨距双涵道风扇,分为左双涵道风扇和右双涵道风扇,设置在主机身框架的左右端;电动机由电池组提供电能,电动机与第二减速齿轮箱连接,第二减速齿轮箱的动力输出端的一
端与左双涵道风扇连接,电动机通过减速齿轮箱驱动左双涵道风扇,使涵道内的两个风扇旋转方向相反;第二减速齿轮箱的动力输出端的另一端通过传动轴由涡轮传动机构与右双涵道风扇离合式连接;
[0011]
所述涡轮轴发动机通过第一速齿轮箱与右双涵道风扇、发电机双离合式连接,可单独切换与右双涵道风扇或发电机连接;
[0012]
所述左双涵道风扇与主机身框架之间安装谐波减速器,可控制左双涵道风扇由水平状态倾转为竖直状态,由电动机动力总成提供动力,为飞行器提供水平牵引力,主机身框架的机翼与机身为飞行器提供升力,这样飞行器机身不需要进行俯仰便可完成前飞或刹车动作。同时涡轮轴发动机离合式与传动轴断开,与发电机相连,将燃油的化学能转化为电能储存在电池组中,供给电动机动力总成使用;
[0013]
所述变桨距双涵道风扇还包括变桨距装置,通过变桨距装置调节每个涵道风扇的桨叶桨距,改变各个涵道风扇的升力值,进而实现四涵道飞行器在空中的姿态控制。
[0014]
作为本发明的进一步改进,变桨距装置包括变距推拉杆、桨矩定位盘、桨毂头、深沟球轴承组,桨矩定位盘与每片桨叶铰接,桨矩定位盘置于桨毂头内,桨矩定位盘与变距推拉杆通过深沟球轴承组连接;当桨矩定位盘上下移动时,会带动桨叶扭转,改变桨矩,进而改变相同转速下的升力;桨矩定位盘会随桨毂头同步旋转,而深沟球轴承组可保证变距推拉杆在不旋转的状态下,控制桨矩定位盘在旋转过程中上下移动。
[0015]
作为本发明的进一步改进,在垂直起降过程中,左双涵道风扇和右双涵道风扇均工作,两两相邻涵道内的风扇旋转方向相反,由涡轮轴发动机和电动机共同驱动;在水平巡航状态下,只有左双涵道风扇工作,且涵道风扇由水平状态转变为竖直状态,由电动机驱动。
[0016]
作为本发明的进一步改进,第一速齿轮箱包括双离合器、主动齿轮、传动齿轮组、减速齿轮箱输出齿轮、分动齿轮箱的输出齿轮,涡轮轴发动机通过双离合器可选择与主动齿轮相连,亦或选择与发电机相连;主动齿轮通过传动齿轮组与减速齿轮箱输出齿轮啮合;减速齿轮箱输出齿轮通过转轴与分动齿轮箱的输出齿轮连接传动;减速齿轮箱输出齿轮带动分动齿轮箱的输出齿轮,带动右双涵道风扇旋转。
[0017]
作为本发明的进一步改进,第二速齿轮箱包括中空离合器、电动机主动齿轮、两级圆柱减速齿轮组、电动机齿轮箱输出齿轮、分动齿轮箱、锥齿轮、传动轴离合器,电动机通过中空离合器连接到电动机主动齿轮,电动机主动齿轮通过两级圆柱减速齿轮组连接电动机齿轮箱输出齿轮,电动机齿轮箱输出齿轮通过转轴连接分动齿轮箱,进而带动左双涵道风扇中的锥齿轮旋转;电动机输出轴的一端通过传动轴离合器连接传动轴,传动轴离合器可控制电动机的动力是否传递到右双涵道风扇。
[0018]
作为本发明的进一步改进,涡轮轴发动机和电动机组成的双动力系统。
[0019]
作为本发明的进一步改进,当电池组电量充满时,涡轮轴发动机停止工作;当电池组电量不足时,涡轮轴发动机重新启动。
[0020]
作为本发明的进一步改进,当飞行器降落时,涡轮轴发动机通过离合器接入传动系统中,与电动机一起为四个涵道风扇提供驱动力,直至飞行器降落;降落后,涡轮轴发动机可继续工作,为动力电池组充电,充至满电状态,然后关闭。
[0021]
作为本发明的进一步改进,飞行器降落后,可关闭涡轮轴发动机,由地面电源为动
力电池组充电,充至满电状态。
[0022]
本发明的有益效果是:在动力系统方面,采用轻量级涡轮轴发动机和电动机组成的双动力系统。在传动系统方面,一个电机和一个涡轮轴发动机通过传动箱体和传动轴带动四个涵道风扇。飞行控制系统方面,保持电机恒速运转,通过变桨距推杆调节每个涵道风扇的桨叶桨距,改变各个涵道风扇的升力值,进而实现四涵道飞行器在空中的姿态控制。
[0023]
四涵道飞行器可在起降过程中实现动力双冗余。而且在起降过程中,飞行器需要的功率是水平巡航状态下的数倍,让涡轮轴发动机在起降过程中介入传动系统,可降低对电机总功率的要求,进而减轻电动机的重量,降低飞行器自重。另外,四个可变桨距的涵道风扇可使飞行器的姿态控制更加灵敏,噪音和气动效率都得以改善,适用于更大载重和更长续航时间的应用需求。
附图说明
[0024]
图1为本发明四涵道飞行器的动力系统结构示意图。
[0025]
图2为本发明电动机处的传动结构示意图。
[0026]
图3为本发明涡轮轴发动机处的传动结构示意图。
[0027]
图4为涵道风扇内部的变桨距结构示意图。
[0028]
在图中,100.变桨距风扇 101.涡轮轴发动机 102.涵道 104.电池组 105燃油箱 106.主传动轴 107.电动机动力总成 108.谐波减速器 200.电动机 201.中空离合器 202.电动机主动齿轮 203.电动机齿轮箱输出齿轮 204.分动齿轮箱 205.锥齿轮 206.传动轴离合器 300.涡轮轴发动机 301.双离合器 302.主动齿轮 303.发电机 304.减速齿轮箱输出齿轮 305.分动齿轮箱的输出齿轮 14.桨矩定位盘 15.桨毂头 16.深沟球轴承组 17.变距推拉杆。
具体实施方式
[0029]
下文中,将参照附图详细描述本发明的优选实施例。在说明书和附图中,对具有相同功能和结构的元件用相同的附图标号表示,并且省略对这些结构元件的重复说明。
[0030]
一种混合动力的四涵道载人飞行器,包括主机身框架、设在主机身框架上的混合动力驱动系统,混合动力驱动系统包括带燃油箱105的涡轮轴发动机101及与涡轮轴发动机101动力输出端连接的第一速齿轮箱,涡轮轴发动机101位于主机身框架右侧中间位置,燃油箱105与涡轮轴发动机101一体式设置;发电机,连接在涡轮轴发动机101的动力输出端,置于涡轮轴发动机101的一侧;电池组104,与发电机稳压端线路连接,位于主机身框架上,由涡轮轴发动机101将化学能转为动能,再带动发电机将动能转为电能,储存在电池组104内;电动机动力总成107,通过一传动轴与涡轮轴发动机101离合式连接。
[0031]
其中电动机动力总成107包括两个变桨距双涵道风扇、电动机、第二减速齿轮箱,两个变桨距双涵道风扇,分为左双涵道风扇和右双涵道风扇,设置在主机身框架的左右端;电动机由电池组104提供电能,电动机与第二减速齿轮箱连接,第二减速齿轮箱的动力输出端的一端与左双涵道风扇连接,电动机通过减速齿轮箱驱动左双涵道风扇,使涵道内的两个风扇旋转方向相反;第二减速齿轮箱的动力输出端的另一端通过传动轴由涡轮传动机构与右双涵道风扇离合式连接。
[0032]
所述涡轮轴发动机101通过第一速齿轮箱与右双涵道风扇、发电机双离合式连接,可单独切换与右双涵道风扇或发电机连接。
[0033]
所述左双涵道风扇与主机身框架之间安装谐波减速器108,可控制左双涵道风扇由水平状态倾转为竖直状态,由电动机动力总成107提供动力,为飞行器提供水平牵引力,主机身框架的机翼与机身为飞行器提供升力,这样飞行器机身不需要进行俯仰便可完成前飞或刹车动作。同时涡轮轴发动机101离合式与传动轴断开,与发电机相连,将燃油的化学能转化为电能储存在电池组104中,供给电动机动力总成107使用。
[0034]
所述变桨距双涵道风扇还包括变桨距装置,通过变桨距装置调节每个涵道风扇的桨叶桨距,改变各个涵道风扇的升力值,进而实现四涵道飞行器在空中的姿态控制。
[0035]
图4为涵道风扇内部的变桨距结构示意图。桨矩定位盘14与每片桨叶的变距定位头相连,当桨矩定位盘14上下移动时,会带动桨叶扭转,改变桨矩,进而改变相同转速下的升力。桨矩定位盘14会随桨毂头15同步旋转,而深沟球轴承组16可以保证变距推拉杆17在不旋转的状态下,控制桨矩定位盘14在旋转过程中上下移动。
[0036]
图1中,变桨距风扇100与涵道102组成四个涵道风扇系统。在四涵道飞行器起飞和降落过程中,由涡轮轴发动机101和电动机动力总成107共同驱动,通过传动轴106进行连通。在逐步转为平飞的过程中,涡轮轴发动机101与传动箱体断开,右边的两个涵道风扇停止工作,涡轮轴发动机101带动发电机300为电池组104充电,将燃油箱105中燃油的化学能转化为电池组104中的电能。另外,在左边的两个涵道风扇与机身主体之间安装谐波减速器108,可控制涵道风扇由水平状态逐步转变为竖直状态。在平飞过程中,单独由电动机动力总成107提供牵引力,升力则由四涵道飞行器的机身和机翼提供。
[0037]
图2为电动机动力总成的内部传动结构示意图。电动机200通过中空离合器201连接到电动机主动齿轮202,经过两级圆柱齿轮减速,将电动机的高转速转为低转速。电动机齿轮箱输出齿轮203带动分动齿轮箱204,进而带动涵道风扇中的锥齿轮205旋转。离合器206可以控制电动机的动力是否传递到另外两个涵道风扇。
[0038]
图3为涡轮轴发动机处的传动结构示意图。涡轮轴发动机300通过双离合器301可以选择与主动齿轮302相连,亦或选择与发电机303相连。当需要涡轮轴发动机驱动涵道风扇系统时,便通过双离合器与主动齿轮302相连。经过两级圆柱减速齿轮组件减速,涡轮轴发动机的输出的高转速将变为低转速状态。由减速齿轮箱输出齿轮304带动分动齿轮箱的输出齿轮305,进而带动涵道风扇旋转。当处于平飞状态时,涡轮轴发动机300通过双离合器301与发电机303相连,为飞行器的动力电池组充电。
[0039]
在垂直起飞时,涡轮轴发动机和电机均为四个涵道风扇提供动力。在起飞后,前面的两个涵道风扇逐步由水平状态倾转为垂直状态,为飞行器提供向前的牵引力;而后面两个涵道风扇则逐渐关闭。当达到一定速度后升力则完全由翼身融合的机身和机翼提供,飞行器进入固定翼巡航模式。涡轮轴发动机则通过双离合器与传动系统断开,同时与发电机相连,将燃油的化学能转化为电能,储存在动力电池组中,供给电机使用。当电池组电量充满时,涡轮轴发动机停止工作;当动力电池组电量不足时,涡轮轴发动机重新启动。当飞行器降落时,涡轮轴发动机通过离合器重新接入传动系统中,与电动机一起为四个涵道风扇提供驱动力,直至飞行器完全降落。降落后,涡轮轴发动机可继续工作,为动力电池组充电,充至满电状态,然后关闭。如果条件允许,也可直接关闭涡轮轴发动机,由地面电源直接为
动力电池组充电,充至满电状态。
[0040]
以上所述仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均包含在本发明的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips