
 商标分类
商标分类  商标转让
商标转让 
无人机时间域航电接收设备自动投放装置的制作方法
 2021-02-12 22:02:29|
2021-02-12 22:02:29| 183|
183| 起点商标网
起点商标网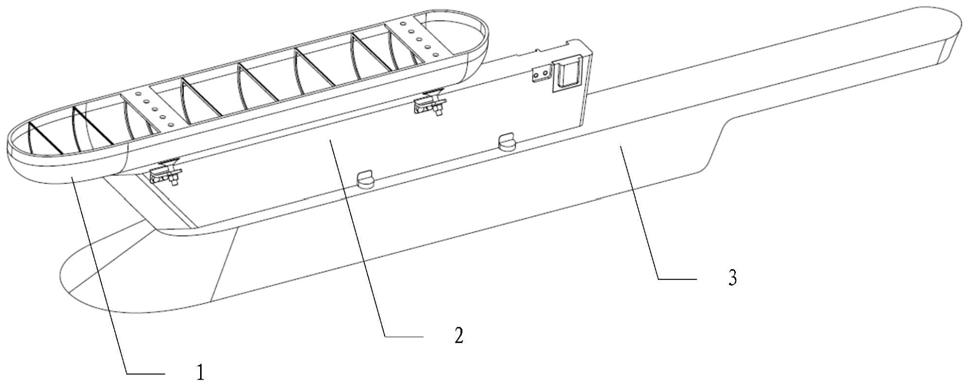
[0001]
本实用新型涉及一种时间域航电接收设备自动投放装置,属于航空电磁测量领域。
背景技术:
[0002]
时间域航空电磁测量技术又称为航空瞬变电磁法,是利用机载线圈发射脉冲电磁波,通过接收线圈测量二次感应电磁场的航空物探方法。该方法具有速度快、成本低、探测范围广等优势,能够在地面人员和设备难以进入的地区开展工作,适于大面积普查;可广泛应用于地质填图、矿产勘查、水文地质和环境监测等领域。
[0003]
目前,时间域航空电磁测量以有人机为主要载体,国外各阶段典型的固定翼时间域系统代表产品有input、mark i、mark ii、mark iv skyvan trislander、casa、questem、spectrem、saltmap、geotemdeep、megatem、tempest、megatemii、geotem1000等系统。我国于2012年研制了第一套吊舱式时间域直升机航空电磁勘查系统。但是基于有人机的时间域航空电磁勘查系统主要面临着危险性大、成本高、灵活性差以及作业效率低等问题。
[0004]
无人机航空物探具有效率高、成本低、风险小、不受地形条件及人为因素影响等优点,是解决上述问题的有效途径。然而,将无人机应用于航空电磁勘查领域仍面临着许多困难,其中之一就是如何实现时间域航电接收设备的挂载。传统有人机在航空物探时常将时间域航电接收设备放在飞机机身内,但由于无人机体积小,机身内可安放载荷空间不大,加之时间域航电接收设备在工作时需要进行拖拽,对无人机飞行性能影响特别大,如果没有可靠的设计与装置,无人机无法安全地挂载时间域航电接收设备。
[0005]
因此,在无人机进行航空电磁勘查作业任务前,将时间域航电接收设备安装在无人机上,保证其正常工作以及在时间域航电接收设备发生故障时实现自动投放是非常重要且十分必要的。目前,国内尚无成功的无人机时间域航电接收设备自动投放装置。
技术实现要素:
[0006]
本实用新型的目的是为了解决上述问题,提供一种无人机时间域航电接收设备自动投放装置。
[0007]
本实用新型的上述目的是通过如下技术方案是实现的:
[0008]
一种无人机时间域航电接收设备自动投放装置,包括筒形转接梁、载荷挂架和异形结构梁;
[0009]
筒形转接梁通过螺栓与无人机机身主承力框连接;载荷挂架上表面通过挂钩与筒形转接梁连接,载荷挂架下表面通过螺栓与异形结构梁上表面连接,异形结构梁下表面与时间域航电接收设备连接。
[0010]
异形结构梁采用金属材料整体切削而成,包括第一部段、过渡段和第二部段,第一部段、过渡段和第二部段上表面平齐,且第一部段、过渡段和第二部段上表面宽度相等;第二部段为矩形平板,其上表面和下表面宽度相等;
[0011]
第一部段主体沿翼展方向的截面为梯形,主体前端沿翼展方向的截面为半圆形,第一部段下表面宽于上表面,第一部段厚度大于第二部段,过渡段沿翼展方向的截面为梯形,用于连接第一部段和第二部段。
[0012]
异形结构梁下表面与时间域航电接收设备的连接方式如下:
[0013]
异形结构梁第一部段下表面前部通过螺栓与时间域航电接收设备中的电动绞车整流罩固联,异形结构梁第二部段下表面安装有挂架,时间域航电接收设备中的接收机吊舱放置在所述挂架中,所述挂架带有纵向导向架;电动绞车通过拖曳线缆与接收机吊舱连接;
[0014]
挂载飞行时,电动绞车收紧拖曳线缆,将接收机吊舱固定于挂架中,投放勘查时,电动绞车释放拖曳线缆,接收机吊舱沿挂架的纵向导向架滑行下落。
[0015]
筒形转接梁包括金属框、碳纤维框、金属梁、碳纤维梁、金属蒙皮和碳纤维蒙皮;
[0016]
筒形转接梁分为前端框架、后端框架和身部框架,其中身部框架为金属框,前端框架和后端框架均为碳纤维框,身部框架外侧固定有金属蒙皮,碳纤维框外侧固定有碳纤维蒙皮,金属框内部安装有金属梁,碳纤维框内部安装有碳纤维梁;
[0017]
所述金属框上表面加工有金属连接架,金属连接架通过螺栓与无人机机身主承力框连接。
[0018]
所述金属蒙皮的厚度为5mm,碳纤维蒙皮采用蜂窝夹层结构,厚度为3mm。
[0019]
碳纤维蒙皮与碳纤维框通过合模胶直接胶接;金属蒙皮与金属框通过合膜胶胶接,在金属框和金属梁上开设漏胶孔,以增加连接强度。
[0020]
金属连接架与无人机机身主承力框连接的螺栓直径≤8mm。
[0021]
载荷挂架上表面通过挂钩与筒形转接梁的金属蒙皮连接。
[0022]
所述载荷挂架的挂钩通过电源线缆及同步线缆与无人机相连。
[0023]
与现有技术相比,本实用新型有益效果为:
[0024]
(1)该装置可以将时间域航电接收设备挂载在无人机上,实现时间域航电接收设备的自动投放,保证航空电磁勘查作业顺利完成。
[0025]
(2)筒形转接梁采用金属材料与碳纤维复合材料的混合结构,金属材料能够满足安装强度要求,碳纤维材料能够有效降低结构重量。筒形转接梁前后各布置的5个直径不大于8mm螺栓,能够有效减小对无人机机身主承力框强度的影响。
[0026]
(3)异形结构梁采用金属材料整体切削,具有良好的结构稳定性,能够同时为时间域航电接收设备中的电动绞车和接收机吊舱挂架提供安装位置。
[0027]
(4)载荷挂架最大挂载能力为250kg,能够满足不同型号的时间域航电接收设备的挂载需求。载荷挂架的挂钩具有指令解锁功能,可通过指令实现其与筒形转接梁的连接与断开,用以实现在紧急状况下的自动投放,保证无人机飞行的安全。
附图说明
[0028]
图1为无人机时间域航电接收设备自动投放装置总体结构示意图。
[0029]
图2为筒形转接梁结构示意图。
[0030]
图3为载荷挂架结构示意图。
[0031]
图4为异形结构梁结构示意图,其中(a)为异形结构梁上表面示意图,(b)为异形结
构梁下表面示意图。
具体实施方式
[0032]
下面结合附图对本实用新型的技术方案进行详细说明。
[0033]
本实用新型可以将时间域航电接收设备安装在无人机上,在时间域航电接收设备中的电动绞车故障或接收机吊舱意外拖挂时,该装置能够按照指令整体投放时间域航电接收设备,确保无人机的飞行安全。
[0034]
图1为无人机时间域航电接收设备自动投放装置结构示意图,结构上包括筒形转接梁1、异形结构梁3和载荷挂架2。筒形转接梁1作为载荷挂架2与无人机机身连接的过渡,进一步保护无人机机身主承力结构;载荷挂架2用于实现航电设备的自动投放;异形结构梁3为电动绞车和接收机吊舱挂架提供安装位置。
[0035]
具体地,筒形转接梁1通过螺栓与无人机机身主承力框连接,作为载荷挂架与无人机机身连接的过渡;载荷挂架2上表面通过挂钩与筒形转接梁1连接,载荷挂架2下表面通过螺栓与异形结构梁3上表面连接,异形结构梁3第一部段下表面通过螺栓与时间域航电接收设备中的电动绞车整流罩固联,第二部段下表面安装有挂架,时间域航电接收设备中的接收机吊舱放置在所述挂架中。挂架带有纵向导向架。电动绞车与接收机吊舱通过拖曳线缆连接。
[0036]
挂载飞行时,电动绞车通过收紧拖曳线缆将接收机吊舱固定于挂架中,投放勘查时,电动绞车释放拖曳线缆,接收机吊舱沿挂架纵向导向架滑行下落。
[0037]
图2为筒形转接梁结构示意图,筒形转接梁重量为40kg,采用金属材料与碳纤维复合材料的混合结构,金属材料能够满足安装强度要求,碳纤维材料能够有效降低结构重量。筒形转接梁包括:金属框1-1、碳纤维框1-2、金属蒙皮1-3和碳纤维蒙皮1-4、金属梁1-5、碳纤维梁1-6。筒形转接梁1分为前端框架、后端框架和身部框架,其中身部框架为金属框1-1,金属框1-1通过螺栓与无人机机身主承力框连接。前端框架和后端框架均为碳纤维框1-2,身部框架外侧固定有金属蒙皮1-3,碳纤维框1-2外侧固定有碳纤维蒙皮1-4。金属框1-1内部安装有金属梁1-5,碳纤维框1-2内部安装有碳纤维梁1-6。
[0038]
筒形转接梁筒体长1180mm,身部框架直径100mm,筒体最深100mm。筒形转接梁金属框1-1前后各加工有一个金属连接架1-7,每个金属连接架上布置有5个螺栓孔,用于与无人机机身主承力框通过螺栓进行连接,单个螺栓直径≤8mm,减小对无人机机身主承力框强度的影响。。
[0039]
金属蒙皮1-3的厚度为5mm,碳纤维蒙皮1-4采用蜂窝夹层结构,厚度为3mm。图3为载荷挂架结构示意图。载荷挂架重量为25kg,包括挂钩和螺栓,最大挂载能力为250kg。载荷挂架的挂钩通过电源线缆及同步线缆与无人机相连,载荷挂架倒置,通过挂钩与筒形转接梁的金属蒙皮连接,通过4个螺栓与异形结构梁的上表面连接。挂钩具有指令解锁功能,无人机可通过指令解锁挂钩与筒形转接梁的连接。
[0040]
图4为异形结构梁结构示意图。异形结构梁重量为40kg,采用金属材料整体切削而成,包括第一部段、过渡段和第二部段,异形结构梁总长1915mm,第一部段、过渡段和第二部段上表面平齐,且第一部段、过渡段和第二部段上表面宽度相等;其中第一部段主体为梯形平板状结构(即沿翼展方向的截面为梯形),第一部段上表面宽度为75mm,第一部段下表面
宽度为185mm,第一部段厚度为300mm,且所述梯形平板状结构前端为半圆形板状结构;过渡段为梯形状结构(即沿翼展方向的截面为梯形),过渡段用于过渡第一部段下表面和第二部段下表面。梯形状结构与第一部段下表面连接的宽度为185mm,梯形状结构与第二部段下表面连接的宽度为75mm;第二部段为矩形平板,矩形平板上表面及下表面宽度均为75mm,矩形平板厚度为125mm;第一部段的下表面宽度大于上表面宽度,第一部段的下表面宽度大于第二部段的下表面宽度,第一部段的上表面与第二部段的上表面在同一平面上,第一部段的厚度大于第二部段的厚度。第一部段上表面布置4个螺栓孔,用于与载荷挂架进行连接;第一部段下表面前部布置3个螺栓孔,用于与时间域航电接收设备中的电动绞车进行连接;第二部段下表面布置4个螺栓孔,用于与时间域航电接收设备中的接收机吊舱挂架连接。图4中(a)为异形结构梁上表面示意图,(b)为异形结构梁下表面示意图。
[0041]
本实用新型可使时间域航电接收设备安全地挂载在无人机上,并有效减轻结构重量,具有较强的稳定性,可广泛用于航空电磁勘查领域。
[0042]
本实用新型无人机时间域航电接收设备自动投放装置的应用方法,包括如下步骤:
[0043]
(1)将时间域航电接收设备中的电动绞车整流罩通过螺栓安装在异形结构梁3第一部段下表面前部,将时间域航电接收设备中的接收机吊舱放置在异形结构梁3第二部段下表面后部挂架中;电动绞车将拖曳线缆缠绕收紧,将接收机吊舱固定在挂架中;
[0044]
(2)挂载飞行到预定工作区域,投放勘查时,无人机向电动绞车发送释放指令,电动绞车松开拖曳线缆,接收机吊舱沿挂架纵向导向架滑行下落;
[0045]
(3)下落到预定位置后,时间域航电接收设备开始工作,工作结束后,无人机向电动绞车发送回收指令,电动绞车缠绕回收拖曳线缆,接收机吊舱沿挂架的纵向导向架返回挂架中,回收到位后电动绞车将拖曳线缆收紧,从而将接收机吊舱固定在挂架中。
[0046]
其中,释放或回收过程中,若电动绞车故障或接收机吊舱意外拖挂时,无人机向载荷挂架2上表面的挂钩发送解锁指令,所述挂钩收到解锁指令后,切断与筒形转接梁1的连接,实现载荷挂架2、异形结构梁3和时间域航电接收设备一起投放。
[0047]
本实用新型的上述数据仅是本实用新型的一种较佳实施例,而并非是对本实用新型的实施方式的限定。对于所述领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无法对所有的实施方式予以穷举。凡是属于本实用新型的技术方案所引申出的显而易见的变化或变动仍处于本实用新型的保护范围之列。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips