
 商标分类
商标分类  商标转让
商标转让 
一种紧凑折叠多旋翼无人机的制作方法
 2021-02-12 22:02:40|
2021-02-12 22:02:40| 265|
265| 起点商标网
起点商标网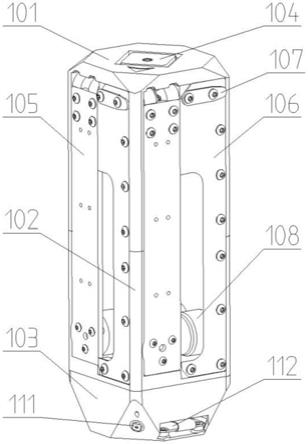
[0001]
本实用新型涉及无人机技术领域,尤其涉及一种紧凑折叠多旋翼无人机。
背景技术:
[0002]
随着控制技术的快速发展,无人机在军事及民用领域得到极大应用。无人机具备安全性高,反应灵敏,机动灵活,成本低等特点,在很多行业得到广泛应用。对于机翼的连接方式不同,无人机可分为固定翼无人机和多旋翼无人机。其中无人机的小型化和高机动性是一个很重要的特点,固定翼无人机起飞需要一段距离的加速才可以达到起飞速度的要求,而多旋翼无人机则克服了这个弊端。
[0003]
固定翼无人机具有飞行速度快、续航时间长、噪音小,能效高等特点,但固定翼需要特殊的起飞和降落环境,且固定翼不能在空中实现悬停,在一些特殊环境下,灵活性受到极大限制;而多旋翼无人机刚好弥补了固定翼无人机的缺点,但其续航时长和速度等性能却不及固定翼。在一些救援例如地震等自然灾害场所,或者战场上,地理条件受到限制,往往需要长续航又需要极大的灵活性,因此往往通过固定翼无人机将若干多旋翼无人机快速送达远距离之外的灾区或者战场,然后将若干多旋翼无人机投放出去,实现悬停侦察等灵活性任务。但由于多旋翼无人机的电机和旋翼尺寸较大,延伸出机体的机臂长度较长,使得多旋翼无人机的空间体积占用较大,阻碍了其便携性。
技术实现要素:
[0004]
本实用新型提供了一种紧凑折叠多旋翼无人机,以解决现有的多旋翼无人机占用空间大、不便于携带的问题。
[0005]
一种紧凑折叠多旋翼无人机,包括机体、螺旋桨动力机构、控制模组;
[0006]
所述机体为中部为腔体的正棱柱结构,且其每个侧面均设置有用于放置机臂的开口;
[0007]
所述螺旋桨动力机构包括对应所述机体每个侧面的开口设置的机臂、电机、可折叠螺旋桨;所述机臂一端与所述机体上端铰接,且铰接处设置有用于将所述机臂撑开的扭簧,所述电机安装于所述机臂的另一端,所述可折叠螺旋桨安装于所述电机的输出轴上;
[0008]
所述控制模组安装于所述机体内,且所述电机与所述控制模组电连接。
[0009]
上述方案提供的紧凑折叠多旋翼无人机,可将机臂、电机、可折叠螺旋桨一同向下折叠,进而收纳到机体内,折叠收缩后体积小,方便携带;其中扭簧始终处于压缩的状态,其为机臂展开提供动力。工作时,将折叠后的多旋翼无人机放进固定翼飞机机舱内,机舱大小恰好能容下折叠后的多旋翼无人机,使无人机保持折叠状态,固定翼飞机飞到指定地点投放多旋翼无人机,多旋翼无人机在重力作用下下落,滑出机舱后,多旋翼无人机机臂在扭簧作用下展开,控制模组控制电机高速转动,利用离心力将可折叠螺旋桨桨叶展开,开始多旋翼无人机的飞行任务,控制模组用于向电机发出开机指令并提供电能。本结构设计适用于对无人机尺寸限制较大的场合,例如一架固定翼无人机需要携带多架可折叠无人机的场
合。
[0010]
进一步地,所述机体每个侧面的开口均设于对应侧面的同一侧。通过采用该错位分布的方式,在折叠时电机和可折叠螺旋桨相互错开,可更加充分的利用空间,故而可进一步减小无人机整体的体积。
[0011]
进一步地,所述机臂与所述机体铰接的一端与铰链固定连接,所述铰链套装于固定于所述机体上端的连接轴上,所述扭簧套装于所述连接轴上,所述扭簧的一端抵靠于所述机臂的下表面,所述扭簧的另一端抵靠于所述机体上,且所述扭簧处于压缩状态。无论机臂是展开状态还是折叠状态,扭簧均处于压缩状态,且折叠状态时,扭簧被压缩的越厉害,进而能提供足够使机臂展开的动力。
[0012]
进一步地,所述机体包括上壳、下壳、底壳及多个侧板,所述上壳和下壳的每个侧面均通过一个所述侧板连接,所述上壳与下壳之间的空间构成腔体,每个所述侧板与所述上壳和下壳之间的空隙构成对应侧面的所述开口,所述底壳安装于所述下壳的底部。
[0013]
进一步地,所述连接轴安装于所述上壳上,每个所述侧板对应所述上壳相邻侧面的连接轴处开设有用于安装连接轴的安装孔,所述侧板上对应所述安装孔位置设置有用于对所述连接轴进行轴向限位的轴挡片。安装时,将连接轴从侧板的安装孔处进行安装,连接轴安装完成后,将轴挡片安装至安装孔处,进而对连接轴进行轴向限位,防止连接轴脱落。
[0014]
进一步地,所述控制模组包括安装于所述机体上的机载计算机、飞控、电调、gps模块、摄像头及电源,所述gps模块、电调均与所述飞控连接,所述飞控、摄像头均与所述机载计算机连接,所述电机与所述电调连接,所述机载计算机、飞控、gps模块、摄像头、电机、电调均与所述电源连接。
[0015]
机载计算机与摄像头连接负责接收摄像头捕捉到的图像,机载计算机还用于向飞控发送动作路径信号;飞控根据飞行要求,控制无人机飞行过程中电机的转动速率,包括控制其平稳飞行和飞行的速度等;gps模块负责接收卫星的定位信号获取当前的经纬度和高度信息,并将地理位置信息传送给飞控,实现无人机在飞行状态下的位置定位;电调将来自飞控的信号调制加压后传送给电机,控制电机带动螺旋桨转动,提供升力。
[0016]
进一步地,所述gps模块嵌入所述上壳顶部,所述飞控、电调均设置于所述上壳内腔中,所述机载计算机、电源均设置于所述底壳中,所述摄像头嵌于所述底壳的凸出一角处。
[0017]
进一步地,所述电机为无刷电机,所述机臂为碳纤维机臂。
[0018]
进一步地,所述机体为正三棱柱、正四棱柱、正五棱柱、正六棱柱、正八棱柱中的一种。
[0019]
进一步地,所述机臂与所述电机通过螺丝固定连接,且所述电机固定于所述机臂一端的下表面,且所述电机安装方向朝下。
[0020]
有益效果
[0021]
本实用新型提出了一种紧凑折叠多旋翼无人机,可将机臂、电机、可折叠螺旋桨一同向下折叠,进而收纳到机体内,折叠收缩后体积小,能减少其在待机状态下的占用空间,方便携带;其中扭簧始终处于压缩的状态,其为机臂展开提供动力。工作时,将折叠后的多旋翼无人机放进固定翼飞机机舱内,机舱大小恰好能容下折叠后的多旋翼无人机,使无人机保持折叠状态,固定翼飞机飞到指定地点投放多旋翼无人机,多旋翼无人机在重力作用
下下落,滑出机舱后,多旋翼无人机机臂在扭簧作用下展开,控制模组控制电机高速转动,利用离心力将可折叠螺旋桨桨叶展开,开始多旋翼无人机的飞行任务,控制模组用于向电机发出开机指令并提供电能。本结构设计适用于对无人机尺寸限制较大的场合,例如一架固定翼无人机需要携带多架可折叠无人机的场合。该紧凑折叠多旋翼无人机结构紧凑,横向尺寸小,可折叠设计便于配合多机作业,可便携于复杂地形作业。
附图说明
[0022]
图1是本实用新型实施例提供的一种紧凑折叠多旋翼无人机折叠状态示意图;
[0023]
图2是本实用新型实施例提供的一种紧凑折叠多旋翼无人机展开状态示意图;
[0024]
图3是图2提供的实施例中机臂与机体连接处局部示意图;
[0025]
图4是图2提供的实施例中侧板的安装孔处局部示意图;
[0026]
图5是本实用新型提供的一种紧凑折叠多旋翼无人机装配体爆炸视图。
[0027]
图中:
[0028]
101-上壳,102-下壳,103-底壳,104-gps模块,105-机臂,106-侧板,107-轴挡片,108-电机,109-可折叠螺旋桨,110-电源固定座,111-摄像头,112-机载计算机,113-铰链,114-扭簧,115-连接轴。
具体实施方式
[0029]
下面结合附图与具体实施方式对本实用新型进行详细说明。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
[0030]
在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“中心”、“纵向”、“横向”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0031]
如图1、图2所示,本实施例提供了一种紧凑折叠多旋翼无人机,包括机体、螺旋桨动力机构、控制模组;
[0032]
所述机体为中部为腔体的正棱柱结构,且其每个侧面均设置有用于放置机臂的开口;
[0033]
所述螺旋桨动力机构包括对应所述机体每个侧面的开口设置的机臂105、电机108、可折叠螺旋桨109;所述机臂105一端与所述机体上端铰接,且铰接处设置有用于将所述机臂105撑开的扭簧114,所述电机108安装于所述机臂105的另一端,所述可折叠螺旋桨109安装于所述电机108的输出轴上;
[0034]
所述控制模组安装于所述机体内,且所述电机108与所述控制模组电连接。
[0035]
上述方案提供的紧凑折叠多旋翼无人机,可将机臂105、电机108、可折叠螺旋桨109一同向下折叠,进而收纳到机体内,折叠收缩后体积小,方便携带;其中扭簧114始终处于压缩的状态,其为机臂105展开提供动力。工作时,将折叠后的多旋翼无人机放进固定翼飞机机舱内,机舱大小恰好能容下折叠后的多旋翼无人机,使无人机保持折叠状态,固定翼飞机飞到指定地点投放多旋翼无人机,多旋翼无人机在重力作用下下落,滑出机舱后,多旋
翼无人机机臂105在扭簧114作用下展开,控制模组控制电机高速转动,利用离心力将可折叠螺旋桨109桨叶展开,开始多旋翼无人机的飞行任务,控制模组用于向电机发出开机指令并提供电能。本结构设计适用于对无人机尺寸限制较大的场合,例如一架固定翼无人机需要携带多架可折叠无人机的场合。
[0036]
为了进一步减小无人机整体的体积,作为一种优选的实施例,所述机体每个侧面的开口均设于对应侧面的同一侧。通过采用该错位分布的方式,在折叠时电机108和可折叠螺旋桨109相互错开,可更加充分的利用空间,故而可进一步减小无人机整体的体积。
[0037]
如图2、图3所示,其中,所述机臂105与所述机体铰接的一端与铰链113固定连接,所述铰链113套装于固定于所述机体上端的连接轴115上,所述扭簧114套装于所述连接轴115上,所述扭簧114的一端抵靠于所述机臂105的下表面,所述扭簧114的另一端抵靠于所述机体上,且所述扭簧114处于压缩状态。无论机臂105是展开状态还是折叠状态,扭簧114均处于压缩状态,且折叠状态时,扭簧114被压缩的越厉害,进而能提供足够使机臂105展开的动力。
[0038]
具体的,如图2、图5所示,所述机体包括上壳101、下壳102、底壳103及多个侧板106,所述上壳101和下壳102的每个侧面均通过一个所述侧板106连接,所述上壳101与下壳102之间的空间构成腔体,每个所述侧板106与所述上壳101和下壳102之间的空隙构成对应侧面的所述开口,所述底壳103安装于所述下壳102的底部,实施时,底壳103可选择与侧板106紧固连接,即通过侧板106将上壳101、下壳102、底壳103连接成一体。当然,在其他实施例中,根据需要也可将上壳与下壳一体成型,然后将底壳安装于其底部来实现。
[0039]
如图3、图4、图5所示,其中,所述连接轴115安装于所述上壳101上,每个所述侧板106对应所述上壳101相邻侧面的连接轴115处开设有用于安装连接轴115的安装孔,所述侧板106上对应所述安装孔位置设置有用于对所述连接轴115进行轴向限位的轴挡片107。安装时,将连接轴115从侧板106的安装孔处进行安装,连接轴115安装完成后,将轴挡片107安装至安装孔处,进而对连接轴115进行轴向限位,防止连接轴115脱落。
[0040]
本实施例中,所述控制模组包括安装于所述机体上的机载计算机112、飞控、电调、gps模块104、摄像头111及电源,所述gps模块104、电调均与所述飞控连接,所述飞控、摄像头111均与所述机载计算机112连接,所述电机108与所述电调连接,所述机载计算机112、飞控、gps模块104、摄像头111、电机108、电调均与所述电源连接。所述gps模块104嵌入所述上壳101顶部,减少整体尺寸,同时便于数据的测量;所述飞控、电调均设置于所述上壳101内腔中,所述机载计算机112、电源均设置于所述底壳103中,减少机载计算机112的外力干扰;所述摄像头111嵌于所述底壳103的凸出一角处,以获得更大的拍摄视角,底壳103上设置有电源固定座110,电源通过绑带固定于电源固定座110上。
[0041]
机载计算机112与摄像头111连接负责接收摄像头111捕捉到的图像,机载计算机112还用于向飞控发送动作路径信号;飞控根据飞行要求,控制无人机飞行过程中电机108的转动速率,包括控制其平稳飞行和飞行的速度等;gps模块104负责接收卫星的定位信号获取当前的经纬度和高度信息,并将地理位置信息传送给飞控,实现无人机在飞行状态下的位置定位;电调将来自飞控的信号调制加压后传送给电机108,控制电机108带动螺旋桨109转动,提供升力。
[0042]
具体实施时,所述电机108可采用无刷电机,所述机臂105采用碳纤维机臂。所述机
臂105与所述电机108通过螺丝固定连接,且所述电机108固定于所述机臂105一端的下表面,且所述电机108安装方向朝下。如图1所示,提供的实施例中机体为正四棱柱,但需明白的是,机体可根据具体需要选择正三棱柱、正四棱柱、正五棱柱、正六棱柱、正八棱柱中的一种,其每个侧面均对应设置有机臂105、电机108和可折叠螺旋桨109。当然,也可进行简单的变形,如机体为正六棱柱或正八棱柱,甚至是正十棱柱,在其侧面彼此间隔设置有机臂105、电机108和可折叠螺旋桨109,这种简单的变形都属于本实用新型保护的范围。
[0043]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips