
 商标分类
商标分类  商标转让
商标转让 
一种火炬传递无人机的制作方法
 2021-02-12 22:02:43|
2021-02-12 22:02:43| 219|
219| 起点商标网
起点商标网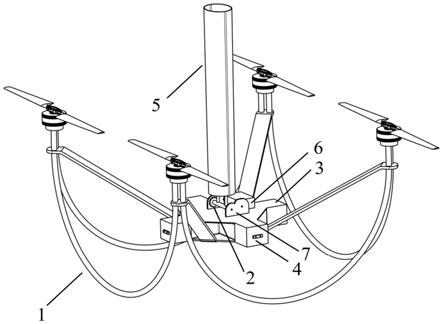
[0001]
本发明涉及无人机技术领域,特别涉及一种火炬传递无人机。
背景技术:
[0002]
奥运会、残奥会、冬奥会以及冬残奥会等大型赛会需要进行火炬传递活动,目前通过无人机进行火炬传递是一种重要方式。通过无人机进行火炬传递时,面临无人机续航时间短、旋翼下洗气流影响火炬火焰以及火炬姿态影响整机重心配平等一系列问题,所以亟需一种具有高载重比机身结构、火炬火焰脱离旋翼下洗气流以及火炬姿态不影响整机重心配平的一种火炬传递无人机。
技术实现要素:
[0003]
针对上述问题,本发明的目的在于提供一种火炬传递无人机,可实现无人机高载重比、旋翼下洗气流不影响火炬火焰以及火炬姿态不影响整机重心配平特性等功能。
[0004]
为了实现上述目的,本发明采用以下技术方案:
[0005]
一种火炬传递无人机,包括旋翼无人机、火炬倾转机构、电池配重系统及火炬,其中旋翼无人机采用四旋翼构型,所述电池配重系统布置于旋翼无人机内,所述火炬倾转机构设置于旋翼无人机的外侧,所述火炬安装在所述火炬倾转机构上,并且通过所述火炬倾转机构的驱动实现倾转动作。
[0006]
所述旋翼无人机包括机身、机架、机臂及四个主旋翼,其中机身外侧沿周向连接有四个机臂,相邻两个机臂之间连接有机架,四个主旋翼分别布设于四个机臂的末端,并且与机架连接。
[0007]
所述机架为u型结构,相邻两个机架相对应的端部与一安装法兰连接,该安装法兰上安装一所述主旋翼。
[0008]
所述机架的材质采用碳纤维。
[0009]
所述火炬倾转机构包括倾转舵机、基座、舵机齿轮、传动轴及从动齿轮,其中倾转舵机和基座设置于所述机身上,所述传动轴可转动地设置于基座上,所述传动轴的两端设有从动齿轮,两个所述从动齿轮分别与所述倾转舵机的两个舵机齿轮啮合;所述火炬与所述传动轴连接。
[0010]
所述火炬的下端通过支撑杆与所述传动轴垂直连接,所述火炬布置在所述旋翼无人机的整机几何中心位置处。
[0011]
所述电池配重系统包括四块动力电池,该四块动力电池对称布置于所述机身内。
[0012]
所述的火炬传递无人机,还包括设置于所述机身上的视觉定位避障模块。
[0013]
所述视觉定位避障模块通过单目或双目视觉传感器实现所述火炬的点火模式精准自主对接点火和所述火炬的预备及传递模式的自主避障和轨迹跟踪。
[0014]
本发明的优点及有益效果是:
[0015]
1.本发明通过采用一体化u型机身结构和一体化动力系统提高整机载重比,一体
化零件设计还可实现快速拆卸与维护。
[0016]
2.本发明通过将四块动力电池对称布置于整机重心四周,提高整机重心兼容性。
[0017]
3.本发明通过采用一体化u型机身结构,消除了火炬与机身之间的运动干涉,可实现火炬在垂直状态与水平状态之间任意角度调整。
[0018]
4.本发明通过将火炬呈竖直向上布置,保证火炬“预备”、“点火”和“传递”三种工作模式切换时火焰均不受旋翼下洗气流影响。
[0019]
5.本发明通过将火炬布置在整机几何中心位置,降低其姿态改变对整机重心的影响。
附图说明
[0020]
图1为本发明火炬传递无人机的结构示意图;
[0021]
图2为本发明中旋翼无人机的结构示意图;
[0022]
图3为本发明中火炬倾转机构的结构示意图;
[0023]
图4为本发明中火炬处于水平状态的结构示意图。
[0024]
图中:1为旋翼无人机,101为机身,102为机架,103为机臂,104为安装法兰,105为主旋翼,2为火炬倾转机构,3为电池配重系统,4为视觉定位避障模块,5为火炬,6为倾转舵机,7为基座,8为舵机齿轮,9为传动轴,10为从动齿轮,11为支撑杆。
具体实施方式
[0025]
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
[0026]
如图1所示,本发明提供的一种火炬传递无人机,包括旋翼无人机1、火炬倾转机构2、电池配重系统3及火炬5,其中旋翼无人机1采用四旋翼构型,电池配重系统3布置于旋翼无人机1内,火炬倾转机构2设置于旋翼无人机1的外侧,火炬5安装在火炬倾转机构2上,并且通过火炬倾转机构2的驱动实现倾转动作。
[0027]
如图2所示,本发明的实施例中,旋翼无人机1包括机身101、机架102、机臂103及四个主旋翼105,其中机身101外侧沿周向连接有四个机臂103,四个机臂103等间距布置。相邻两个机臂103之间连接有机架102,四个主旋翼105分别布设于四个机臂103的末端,并且与机架102连接。
[0028]
具体地,机架102为u型结构,相邻两个机架102相对应的端部与一安装法兰104连接,该安装法兰104上安装一主旋翼104。机架102采用一体化u型结构,消除了火炬5与机身之间的运动干涉,可实现火炬5在垂直状态与水平状态之间任意角度调整。
[0029]
进一步地,机架102的材质采用碳纤维。
[0030]
如图1、图3所示,本发明的实施例中,火炬倾转机构2包括倾转舵机6、基座7、舵机齿轮8、传动轴9及从动齿轮10,其中倾转舵机6和基座7设置于机身101的顶部,传动轴9可转动地设置于基座7上,传动轴9的两端设有从动齿轮10,两个从动齿轮10分别与倾转舵机6的两个舵机齿轮8啮合;火炬5与传动轴9连接。
[0031]
进一步地,火炬5的下端通过支撑杆11与传动轴9垂直连接,火炬5布置在旋翼无人机1的整机几何中心位置处,火炬5通过布置在整机几何中心位置降低其姿态改变对整机重
心的影响。
[0032]
如图4所示,倾转舵机6驱动传动轴9转动,可以使火炬5在水平位置和竖直位置之间的任意角度转动。火炬倾转机构2通过控制火炬5的姿态实现“预备”、“点火”和“传递”三种工作模式切换。
[0033]
如图1所示,本发明的实施例中,电池配重系统3包括四块动力电池,该四块动力电池对称布置于机身101的重心四周,提高整机重心兼容性。
[0034]
在上述实施例的基础上,如图1所示,本发明的火炬传递无人机还包括设置于机身101上的视觉定位避障模块4。视觉定位避障模块4通过通过布置在机身四周的单目或双目视觉传感器实现火炬5的点火模式精准自主对接点火和火炬5的预备及传递模式的自主避障和轨迹跟踪。火炬5在“预备”工作模式时呈竖直向上布置,且火炬5在“预备”、“点火”和“传递”三种工作模式切换时火焰均不受旋翼下洗气流影响。
[0035]
本发明提供的一种火炬传递无人机的工作原理是:
[0036]
本发明通过旋翼无人机1搭载火炬倾转机构2、电池配重系统3、视觉定位避障模块4以及火炬5,实现火炬5的点火与传递,火炬倾转机构2通过控制火炬5的姿态实现“预备”、“点火”和“传递”三种工作模式,电池配重系统3通过将四块动力电池对称布置于整机重心四周,以提高整机重心兼容性;视觉定位避障模块4通过单目或双目视觉传感器实现“点火”模式精准自主点火和“预备”、“传递”模式自主避障和轨迹跟踪,火炬5通过布置在整机几何中心位置降低其姿态改变对整机重心的影响。本发明可以实现火炬自主传递与点火,操作简单,方便快捷,节省成本。
[0037]
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips