
 商标分类
商标分类  商标转让
商标转让 
一种用于磁力爬壁机器人的辅助转运车架的制作方法
 2021-02-07 13:02:31|
2021-02-07 13:02:31| 320|
320| 起点商标网
起点商标网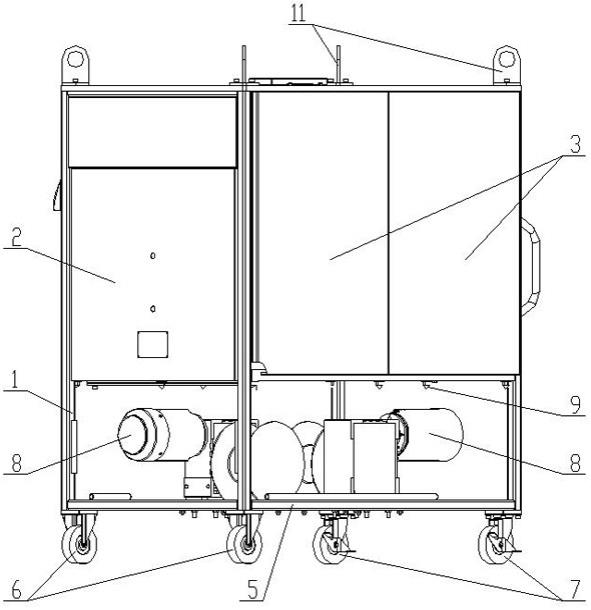
[0001]
本实用新型涉及磁力爬壁船舶清洗领域,尤其涉及一种用于磁力爬壁机器人的辅助转运车架。
背景技术:
[0002]
在船舶清洗作业中,由于人员和常规设备难以到达船舶的侧面等位置,因此多采用磁力爬壁装备,即能够沿着船舶的侧面攀爬行走的磁力爬壁机器人。现有的磁力爬壁装备通常包括磁力爬壁机器人和机器人辅助转运车架,磁力爬壁机器人通过内置磁铁产生的磁吸附力使机器人能够吸附在船舶的侧面,再通过机器人自身的车轮进行运动并进行清洗作业,而机器人辅助转运车架除了用于两种机器人之外,还用于运送需要与机器人配合使用的电控柜和卷扬机构的辅助设备。
[0003]
现有的机器人辅助转运车架为缺少围挡的开放式框架结构,而船舶清洗作业的生产现场通常为港口码头等户外场地,并且台风下雨频繁,开放式结构导致车架上放置的机器人、电控柜和卷扬机构等设备辅件缺少保护遮挡,容易腐蚀损坏。现有车架的底部采用后端安装两个充气固定轮,前端通过销轴和转向拉杆配合安装两个充气轮实现转向,结构复杂,移动和转向均较为困难,并且充气轮容易被生产现场的尖锐物损坏,损坏后更换困难。现有车架上在安装电控柜时,采用的是将电控柜吊装在车架顶部横梁上的结构,在车架的运动过程中会造成电控柜产生额外的颠簸震动,对电控柜的箱体和内部元器件损害较大,难以对电控柜进行长时间安全运送。
技术实现要素:
[0004]
为解决上述现有的机器人辅助转运车架存在的问题,本实用新型提供了一种用于磁力爬壁机器人的辅助转运车架。
[0005]
本实用新型为解决上述技术问题所采用的技术方案是:一种用于磁力爬壁机器人的辅助转运车架,包括转运车框架体,转运车框架体上设有机器人转运箱,机器人转运箱为多块不锈钢板与转运车框架体的棱柱配合焊接而成的矩形箱体结构,机器人转运箱的一侧为双开门板,机器人转运箱内部放置有电控柜,机器人转运箱内部焊接有多根电控柜安装立柱,电控柜的背面与电控柜安装立柱的表面贴合固定;转运车框架体底部安装有底板,底板下表面的四角共安装有四个车轮,其中位于转运车框架体一侧的两个车轮为固定脚轮,位于转运车框架体另一侧的两个车轮为万向带挡块脚轮;底板上放置有卷扬机构,卷扬机构位于机器人转运箱下方,机器人转运箱的底侧边沿上设有多个挂钩,多个挂钩上配合挂有帆布,通过帆布对卷扬机构沿转运车框架体的一周进行围挡。
[0006]
优选的,所述转运车框架体顶端的四角分别安装有吊耳。
[0007]
优选的,所述转运车框架体为采用槽钢和角钢焊接而成的框架结构。
[0008]
优选的,所述底板上放置有两个卷扬机构,其中一个卷扬机构的缆绳与摆臂式磁力爬壁机器人相连接,另一个卷扬机构的缆绳与吸盘式磁力爬壁机器人相连接。
[0009]
根据上述技术方案,本实用新型的有益效果是:
[0010]
1、本实用新型在转运车框架体的结构上通过设置机器人转运箱和帆布,使转运车框架体由现有的开放式结构变为了封闭结构,能够保证车架上放置的机器人、电控柜和卷扬机构等设备辅件具有保护遮挡,避免设备腐蚀损坏,并且机器人转运箱的双开门结构和帆布通过挂钩安装的结构都非常容易开启,方便设备在辅助转运车架上的存取。
[0011]
2、本实用新型中通过两个固定脚轮和两个万向带挡块脚轮配合实现辅助转运车架的移动和转向,与现有车架所采用的充气固定轮配合销轴和转向拉杆相比,不仅简化了车轮的安装结构,也使车架的移动和转向更为简便轻盈,并且避免了原有的充气轮容易损坏、更换困难的弊端。
[0012]
3、本实用新型中将电控柜由吊装在横梁上改为了直接放置在机器人转运箱内,并使电控柜的背面与电控柜安装立柱的表面贴合固定,保证了电控柜与辅助转运车架之间的相对固定安装,在车架的运动过程中也不会使电控柜产生额外的颠簸震动,避免了原有吊装形式容易损害电控柜的箱体和内部元器件的弊端,更加适于对电控柜进行长时间安全运送,满足生产需要。
附图说明
[0013]
图1为本实用新型的结构示意图,图中未示出帆布;
[0014]
图2为本实用新型开门后的结构示意图,图中未示出帆布;
[0015]
图3为本实用新型开门后的结构示意图,图中未示出电控柜;
[0016]
图4为本实用新型的侧视示意图,图中未示出帆布;
[0017]
图5为图4沿a-a的剖视示意图。
[0018]
图中标记:1、转运车框架体,2、机器人转运箱,3、双开门板,4、电控柜安装立柱,5、底板,6、固定脚轮,7、万向带挡块脚轮,8、卷扬机构,9、挂钩,10、帆布,11、吊耳。
具体实施方式
[0019]
参见附图,具体实施方式如下:
[0020]
一种用于磁力爬壁机器人的辅助转运车架,包括转运车框架体1,转运车框架体1为采用槽钢和角钢焊接而成的框架结构,转运车框架体1顶端的四角分别安装有吊耳11。转运车框架体1上设有机器人转运箱2,机器人转运箱2为多块不锈钢板与转运车框架体1的棱柱配合焊接而成的矩形箱体结构,机器人转运箱2的一侧为双开门板3,机器人转运箱2内部放置有电控柜,机器人转运箱2内部焊接有多根电控柜安装立柱4,电控柜的背面与电控柜安装立柱4的表面贴合固定;转运车框架体1底部安装有底板5,底板5下表面的四角共安装有四个车轮,其中位于转运车框架体1一侧的两个车轮为固定脚轮6,位于转运车框架体1另一侧的两个车轮为万向带挡块脚轮7;底板5上放置有卷扬机构8,卷扬机构8位于机器人转运箱2下方,机器人转运箱2的底侧边沿上设有多个挂钩9,多个挂钩9上配合挂有帆布10,通过帆布10对卷扬机构8沿转运车框架体1的一周进行围挡。
[0021]
本实施例中,底板5上放置有两个卷扬机构8,其中一个卷扬机构8的缆绳与摆臂式磁力爬壁机器人相连接,另一个卷扬机构8的缆绳与吸盘式磁力爬壁机器人相连接,使辅助转运车架能够与两个磁力爬壁机器人同时配合使用。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips