
 商标分类
商标分类  商标转让
商标转让 
具有安全设备的运输设备的制作方法
 2021-02-07 11:02:21|
2021-02-07 11:02:21| 319|
319| 起点商标网
起点商标网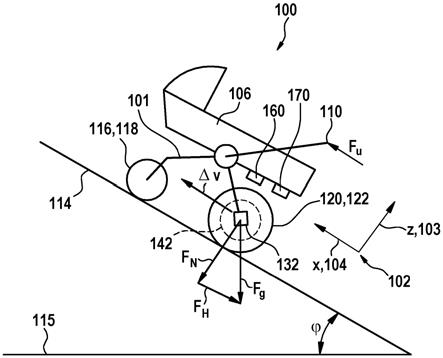
[0001]
本发明涉及一种运输设备、尤其是童车,该运输设备具有至少三个车轮并且具有针对用户的把手,其中所述至少三个车轮中的至少一个车轮构造为驱动轮,借助所配属的电驱动单元可以以电动方式来驱动所述驱动轮,以便能够实现至少部分地以电动方式来辅助用户手动地推或者拉运行运输设备。
现有技术
[0002]
从现有技术中已知了构造为童车的运输设备,该运输设备具有通过以电动方式可驱动的驱动轮在推或者拉运行中对用户的主动辅助。出于安全原因,运输设备(尤其是这样的童车)的驱动系统可以构造成,探测运输设备的临界状态。例如,可以确定用户的不在场或童车的松开,以致可以至少基本上防止由于自动地和不受控地继续前进的童车造成的事故。在这种情况下,例如已知了电气化的(elektrifizierte)童车,其中通过至少一个力传感器可探测到用户的在场。此外,已知了电气化的童车,其中通过加速度传感器可探测童车的加速度。
技术实现要素:
[0003]
本发明涉及一种运输设备、尤其是童车,该运输设备具有至少三个车轮并且具有针对用户的把手,其中所述至少三个车轮中的至少一个车轮构造为驱动轮,借助所配属的电驱动单元可以以电动方式来驱动所述驱动轮,以便能够实现至少部分地以电动方式来辅助用户手动地推或者拉运行该运输设备。设置有探测单元和安全设备,所述探测单元用于探测运输设备的加速度,所述安全设备用于根据分别探测到的加速度来识别运输设备的临界状态。
[0004]
因此,本发明使得能够提供一种运输设备,在所述运输设备中,通过安全设备可以安全地和可靠地确定临界状态。因此,可以容易地和不复杂地探测到并且因此防止运输设备的至少一个不期望的加速度。
[0005]
优选地,给安全设备配属有倾翻识别单元,所述倾翻识别单元构造成识别运输设备的倾翻。因此,可以以简单的方式和方法来提供安全的运输设备。
[0006]
优选地,倾翻识别单元构造成,在运输设备在斜面上的运动与倾翻之间进行区分。因此,可以简单地和不复杂地在运输设备(例如为了向上行进到路沿石上)的倾翻或者在斜面上的运动之间进行区分,由此可以防止不期望的加速度。
[0007]
根据一实施形式,给倾翻识别单元配属有倾角确定装置,所述倾角确定装置基于三角学和运输设备的分别探测到的加速度来确定运输设备的倾角。因此,可以安全地和可靠地确定运输设备的倾翻。
[0008]
倾翻识别单元优选地具有倾翻识别装置,所述倾翻识别装置通过将地基的斜面的斜角与运输设备的倾角进行比较来确定运输设备的倾翻。因此,以简单的方式和方法,可以区分运输设备的倾翻与在斜面上的运动。
[0009]
优选地,探测单元借助加速度传感器来确定运输设备的分别探测到的加速度。因此,可以使得能够简单地和容易地确定运输设备的加速度。
[0010]
根据一实施形式,设置有计算设备,所述计算设备构造成,从分别借助加速度传感器来确定的加速度中减去重力加速度,以便获得分别经过校订的(bereinigten)加速度值。因此,可以进行精确的和精密的加速度确定。
[0011]
给安全设备优选地配属有传感器数据融合单元,所述传感器数据融合单元构造成,基于运输设备的分别探测到的加速度和角加速度,计算运输设备的当前位置的三个卡登角(kardanwinkel)。因此,可以在三维空间中确定运输设备的运动。
[0012]
优选地基于分别探测到的加速度和三个卡登角,计算设备确定运输设备的分别经过校订的加速度。因此,可以简单地且不复杂地进行对经过校订的加速度的确定。
[0013]
优选地,经由至少一个驱动轮的车轮转速,探测单元确定运输设备的相应的加速度。因此,可以使得能够替选地确定运输设备的加速度。
[0014]
根据一实施形式,给安全设备配属有碰撞识别装置,所述碰撞识别装置构造成识别运输设备的碰撞。因此,安全设备可以确定运输设备的其他相关的状态。
[0015]
优选地,为了探测到对运输设备产生影响的跳动,碰撞识别装置识别碰撞,其中碰撞识别装置在运输设备的加速与跳动之间进行区分。因此,可以使得能够精确地和精密地确定运输设备的碰撞。
[0016]
优选地,安全设备具有质量确定单元,所述质量确定单元构造成确定运输设备的质量。因此,可以以简单的方式和方法来确定运输设备的质量。
[0017]
基于对至少一个驱动轮起作用的力和分别探测到的加速度,质量确定单元优选地确定在静止状态中和/或在制动过程中的运输设备的质量。因此,可以使得能够以经过改善的方式来操控运输设备。
[0018]
根据一实施形式,质量确定单元估计运输设备的质量,其中设置有正反馈调节装置,所述正反馈调节装置基于所估计的质量和通过运输设备的用户加载到运输设备上的加速度来适配运输设备的质量。因此,可以使得能够简单地和精确地操控运输设备,其中可以在没有直接测量质量的情况下进行质量确定。
[0019]
优选地,安全设备构造成,在探测运输设备的临界状态时,由于运输设备的倾翻和/或对运输设备产生影响的跳动而激活制动设备。因此,可以使得能够安全地和可靠地运行该运输设备。
附图说明
[0020]
依据在附图中示出的实施例,在随后的描述中对本发明予以更详细地阐述。在附图中:图1示出了具有根据本发明的安全设备的运输设备的示意性侧视图,该运输设备构造为童车,图2示出了配属给图1的安全设备的控制设备的示意图,图3示出了图2的安全设备的示意图,图4示出了倾翻确定系统的示意图,该倾翻确定系统具有配属给图1的运输设备的加速度的分解(aufteilung),
图5示出了图4的倾翻确定系统的示意性结构,图6示出了其他倾翻确定系统的示意图,该其他倾翻确定系统具有配属给图1的运输设备的加速度和力的分解,图7示出了图6的倾翻确定系统的示意性结构,图8示出了传感器融合单元的示意性结构,所述传感器融合单元用于确定针对倾翻确定系统所需的卡登角,图9示出了图8的传感器融合单元的简化图,图10示出了在运输设备运动时对图1的运输设备起作用的速度和加速度的示意图,图11示出了其他倾翻确定系统的对图1的运输设备起作用的速度和加速度的示意性结构,图12示出了图11的倾翻确定系统的示意图,图13示出了配属给图11和图12的倾翻确定系统的倾翻识别装置的示意图,图14示出了具有由图11至图13的倾翻确定系统所确定的值的示例性的三维曲线图,图15示出了配属给图1至图3的安全设备的碰撞识别装置的示意性结构,图16示出了示例性的配属给图15的碰撞识别装置的v-t曲线图,图17示出了示例性的配属给图15的碰撞识别装置的a-t曲线图,图18示出了示例性的配属给图15的碰撞识别装置的-t曲线图,图19示出了图1的运输设备的示意性俯视图,图20示出了配属给图1至图3的安全设备的质量确定单元的示意性结构,图21示出了用于确定制动过程的示例性的m-t曲线图以及n-t曲线图,以及图22示出了替选的质量确定单元的示意性结构。
具体实施方式
[0021]
图1示出了仅仅示范性地构造为童车的运输设备100。替选地,运输设备100也可以是独轮车、手推车、废料处理容器,尤其是垃圾箱、起重车或者这一类的。
[0022]
童车100示例性地具有可折叠的车架101和针对未示出的儿童的卧式或者座椅安装板(liege
-ꢀ
oder sitzwanne)106。在车架101处,优选地此外还设置有针对童车100的用户的u形把手以及优选地以符合人体工学的方式可调高度的把手110,该用户同样以图画方式未示出。
[0023]
优选地,童车100具有至少三个车轮116、118、120、122。优选地,在此两个车轮布置在后轴上,并且一个车轮布置在前轴上,可是也可以将两个车轮布置在前轴上,而将一个车轮布置在后轴上。在至少三个车轮116、118、120、122中,优选地至少一个车轮构造为驱动轮132。优选地,借助至少一个电驱动单元142,以电动方式可驱动至少一个驱动轮132。在此,至少一个驱动轮132可以布置在前轴和/或在后轴上。优选地,至少两个车轮构造为驱动轮120、122。
[0024]
在基本上水平的地基115上,或者在倾斜了角度或歪斜地伸展的地基114或斜面上,通过电驱动单元142,至少部分地以电动方式辅助童车100朝优选的推或者拉方向的手动的推或者拉运行。说明性地,在斜面114上布置有童车100。电驱动单元142在本发明基本上优选地包括电动机,所述电动机例如可以利用无刷的、永久励磁的直流电动机来实现,并
且所述电动机优选地具有传动器,用于与童车或运输设备100的运行要求进行转速和转矩适配。驱动单元142优选地可借助电子调节设备来调节。
[0025]
附加地或者替选地,两个后车轮120、122(如上面所描述的那样)也可以构造为驱动轮132,其中在用于实现童车100的以电动方式来辅助的推或者拉运行的这样的群集(konstellation)中,分别借助电驱动单元142优选地可以各个单独地来驱动所述驱动轮,并且借助调节设备可以彼此独立地来调节所述驱动轮。
[0026]
在运输设备100或童车上,优选地设置有用于探测运输设备100的加速度的探测单元170。此外,给运输设备100配属有控制设备160,该控制设备160根据由探测单元170探测到的信号(尤其是根据运输设备100的加速度)来控制运输设备。
[0027]
只有当用户力fu作用在童车100的把手110处时,才进行接受和/或维持手动的、至少部分以电动方式来辅助的推或者拉运行。与电驱动单元142无关的重力f
g
=m*g对童车100起作用,其中m表示童车100的一般未知的(总)质量。在倾斜了角度 的斜地基114的情况下,重力f
g
以向量方式由法向力f
n
和根据关系f
h
=m*g*sin()的下坡从动力(hangabtriebskraft)f
h
组成,其中法向力f
n
垂直于倾斜的地基114和朝坐标系102的负的z方向103起作用,而下坡从动力f
h
平行于该地基114和朝坐标系102的负的x方向104起作用。至少一个电驱动单元142与用户力f
u
一起引起关于童车100的瞬时速度的速度变化δv。在此,速度变化δv平行于倾斜的地基114和在坐标系102的x方向104上进行。
[0028]
图2示出了图1的控制设备160。在此,图2解释清楚了配属给控制设备160的探测单元170,所述探测单元170构造成,探测运输设备100或童车的加速度a。根据本发明,在此向配属给控制设备160的安全设备200传送探测到的加速度a。优选地,安全设备200构造用于根据分别探测到的加速度a来识别运输设备100的临界状态。
[0029]
图3示出了图2的安全设备200。给安全设备200优选地配属有倾翻识别单元215,所述倾翻识别单元215构造成,识别运输设备100或童车的倾翻。在本发明的上下文中,“倾翻”理解为童车100为了例如从道路行进到步道上或越过路沿石而倾斜。可是,这与童车100的栽倒无关。在此,倾翻识别单元215优选地构造成,在运输设备100在斜面114上的运动与倾翻之间进行区分。因此,在倾斜时,可以防止童车100由于假设童车100在斜面114向上行进而造成的不期望的加速。优选地,给倾翻识别单元215配属有倾角确定装置210,该倾角确定装置210优选地基于三角学和运输设备100的分别探测到的加速度a来确定童车100的倾角α。除此以外,倾翻识别单元215优选地具有倾翻识别装置220,所述倾翻识别装置220通过将地基的斜面114的斜角与运输设备100的倾角α进行比较来确定童车100的倾翻。如果识别出运输设备100或童车的倾翻,则优选地激活制动设备250,所述制动设备250构造成,使童车100制动。
[0030]
除此以外或者替选于此地,给安全设备200配属有碰撞识别装置230,所述碰撞识别装置230构造成,识别运输设备100的碰撞。在此,通过探测到对运输设备100产生影响的跳动(图18中的1636),碰撞识别装置230识别出碰撞。优选地,碰撞识别装置230在此在运输设备100的加速与跳动之间进行区分。跳动在此是童车的加速度的时间导数,或是在预先限定的时间段中的比较高的加速度,其中可以规定阈值,从何时起,加速是跳动。类似于倾翻识别单元215,在探测到的跳动或碰撞的情况下,激活制动设备250。
[0031]
此外,安全设备200附加地或者替选地具有质量确定单元240,所述质量确定单元240构造成,确定运输设备100的质量m。在此,根据运输设备100的加速度a和倾角α,质量确定单元240优选地确定质量m。尤其是,基于对至少一个驱动轮132起作用的力(图19中的f
mot1
、f
mot2
)和分别探测到的加速度a,质量确定单元240确定在静止状态中和/或在制动过程中的质量m。除此以外,质量确定单元240替选地或者可选地也可以估计运输设备100的质量m,其中设置有正反馈调节装置(图22中的2300),所述正反馈调节装置基于所估计的质量和通过运输设备100的用户加载到运输设备100上的加速度da/dt来适配运输设备100的质量(图22中的m_supp)。指出了,可以给安全设备200配属有倾翻识别单元215和/或碰撞识别装置230和/或质量确定单元240。
[0032]
图4示出了配属给图3的倾翻识别单元215的结构400,用于确定倾角α。在此,图4示出了水平的地基115,给所述水平的地基115配属有坐标系402,以及图4示出了倾斜的地基或图1的斜面114连带童车100的示例性的车轮120,给所述车轮120配属有坐标系410。在此,坐标系402平行于水平的地基115地示例性地具有在横坐标x上的x方向,并且垂直地或在纵坐标z上具有z方向。此外,坐标系410具有横坐标411以及纵坐标412,在横坐标411上标注有加速度a
xr
,在纵坐标412上标注有加速度a
zr
。除此以外,设置有坐标系420,该坐标系420倾斜了倾角α,并且具有横坐标421以及纵坐标422,在横坐标421上标注有加速度ax,在纵坐标422上标注有加速度az。坐标系410、420在此在示例性的车轮120处具有其原点。此外,朝坐标系402的z方向,从车轮120的中心开始示出重力加速度g。
[0033]
优选地,加速度ax、ay、az利用加速度传感器(图8中的811)来确定,优选地利用mems传感器来确定。为了确定倾角α,坐标系410、420(所谓的物体固定坐标系(koerperfesten system))的加速度a
xr
、a
zr
或ax、az必须被换算到坐标系402或输出系统中。加速度的换算优选地利用变换矩阵t借助三个卡登角ψ、θ、φ进行。
[0034]
图5示出了图3的倾翻识别单元215的实施形式450。在此,倾翻识别单元450具有计算设备510,所述计算设备510构造成,从分别通过加速度传感器(图8中的811)确定的加速度ax、ay、az中减去重力加速度g,以便获得分别经过校订的加速度值a
xr
、a
yr
、a
zr
。优选地,在计算设备510中,首先利用变换矩阵t将坐标系420的加速度a
xr
、a
zr
或ax、az换算到坐标系402中。在此,变换矩阵t或t
420 402
内容是:。
[0035]
三个卡登角ψ、θ、φ在此通过传感器融合单元(图8和图9中的800)来确定,所述传感器融合单元更详细地在图8和图9中予以描述。此后,确定经过校订的加速度值a
xr
、a
yr
、a
zr
,其中为此,类似于加速度,重力加速度g必须利用下列公式被变换到坐标系402中:
由此,要如下地计算经过校订的加速度值a
xr
、a
yr
、a
zr
:经过校订的加速度值a
xr
、a
yr
、a
zr
借此表达如下:第1方程:,第2方程:。
[0036]
指出了,加速度a
rad
优选地对应于加速度a
xr
,并且加速度a
zr
是零。在图3的倾角确定装置210的实施形式520中,此后进行倾角α的确定。该倾角α优选地可以从第1方程或下列公式中被确定:。
[0037]
所确定的倾角α接着被转发给倾翻识别装置220,所述倾翻识别装置220检验,童车100是倾翻还是在斜面114上行进。
[0038]
图6示出了图1的童车100,其中解释清楚了配属给图3的倾翻识别单元215的用于确定倾角α的结构400。在图6中,用户力f
u
以及重力f
g
分别分解成在x方向上的力f
ux
、f
gx
和在y方向上的力f
uy
、f
gy
。此外,在图6中记入了童车100的加速度a
x
。类似于图4的结构400,结构600具有物体固定坐标系610。坐标系610具有纵坐标612以及横坐标611,在纵坐标612中实现在z方向上的加速度a
zb
,在所述横坐标611中实现在x方向上的加速度a
xb
。在此,与横坐标611或与加速度方向a
xb
成倾角α地绘出加速度a
x
。除此以外,给驱动轮132配属有车轮转速n,其中根据一实施形式,探测单元170(尤其是通过倾角确定装置(图7中的710))经由至少一个驱动轮132的车轮转速n确定相应的加速度a
x
、a
y
、a
z
,尤其是确定童车100的加速度a
x
。
[0039]
图7示出了图3的倾翻识别单元215的实施形式650,所述倾翻识别单元215具有图5的计算设备510,其中图7中的计算设备510借助卡登角ψ、θ、φ和测量到的加速度ax、ay、az确定经过变换的和经过校订的加速度a
xb
、a
yb
、a
zb
。在此,如在图5中那样,从测量到的加速度(如随后所示的那样)中减去重力加速度g:。
[0040]
根据图6的结构600,优选地经由经过求导的车轮转速n,利用下列公式来计算车轮
加速度a
rad
:。
[0041]
一使童车100加速,倾角确定装置210的实施形式710就利用下列公式来确定倾角α:。
[0042]
类似于倾翻识别单元450,所确定的倾角α被转发给倾翻识别装置220。那么,倾翻识别装置220优选地检验,童车100是倾翻还是在斜面114上行进。
[0043]
图8示出了配属给安全设备200的传感器融合单元800,所述传感器融合单元800优选地构造成,基于运输设备100的分别探测到的加速度a
x
、a
y
、a
z
和优选地角加速度ω
x
、ω
y
、ω
z
,计算运输设备100的当前位置的三个卡登角θ、φ、ψ。传感器融合单元800优选地具有探测单元170,给所述探测单元170优选地配属有至少一个加速度传感器811。优选地,至少一个加速度传感器811构造为mems传感器。借助通过至少一个加速度传感器811确定的加速度,紧接着可以借助方位计算单元812进行童车100的方位计算。所确定的数据随后被传送给其他单元815,所述其他单元815具有陀螺仪813以及卡尔曼滤波器814。在单元815中,接着将所确定的值变换、计算和/或滤波,以便获得卡登角ψ、θ、φ。
[0044]
图9示出了图8的传感器融合单元800,其中童车100的测量到的加速度ax、ay、az以及角加速度ω
x
、ω
y
、ω
z
用作输入变量,并且输出卡登角ψ、θ、φ作为输出变量。在此,卡登角ψ、θ、φ利用下列公式来计算:。
[0045]
在此,u是在x方向上的速度,v是在y方向上的速度,并且w是在z方向上的速度。此外,p是在x方向上的角加速度,q是在y方向上的角加速度,并且r是在z方向上的角加速度。
[0046]
在速度恒定的情况下,如果p=q=r=0和,那么适用下列公式:。
[0047]
因此,这两个角度θ和φ可以经由下列公式来计算:这两个角度θ和φ可以经由下列公式来计算:。
[0048]
另外,需要这两个角度θ和φ,以便从由加速度传感器811测量到的加速度中减去重力加速度g。在此,从角加速度中计算快速的转动过程。由加速度传感器811确定的加速度值优选地被用于绝对角度计算。借此,转动角变得与用户加速度无关。
[0049]
图10示出了在运动中的图1的童车100。为了即使在童车100运动时也能够计算倾角α,必须补偿童车加速度和离心加速度。在此,加速度如下地组成:
。
[0050]
如果按照θ转换该公式,则获得:。
[0051]
在转动时,如下算出加速度:。
[0052]
优选地(如上面所描述的那样),可以从车轮转速n中计算在x方向上的车加速度:。
[0053]
从旋转半径r和车轮速度中计算离心力:从旋转半径r和车轮速度中计算离心力:从旋转半径r和车轮速度中计算离心力:。
[0054]
在此,经由下列公式,将角速度变换到欧拉坐标系或物体固定坐标系中:,其中φ是滚转角(roll-winkel),并且θ是俯仰角(pitch-winkel)。借助倾角α,可以补偿下坡从动力,以便改善童车100的行驶特性和/或制动特性。
[0055]
图11示出了配属给图3的倾翻识别单元215的结构1100,用于确定倾角α。图11解释清楚了各个对童车100起作用的向量的三角学关系。在此,第一直角三角形1112具有斜边,该斜边限定为童车100的前车轮距后车轮的车轮间距r1。此外,在该斜边与邻边v1之间布置有倾角α,并且对边y1限定了高度,优选地限定了童车100的倾翻的车轮具有的高度。第二直角三角形113在此具有斜边s1,该斜边s1限定在优选地配属有速度v2的斜面上的线段。线段s1在此具有斜角,其中第二三角形113的对边是第一三角形1112的对边。除此以外,设置有公共的三角形1114,该三角形1114具有车轮间距r1,与向量v1具有倾角α以及具有线段s1。
[0056]
本结构1100优选地具有三个状态,其中如果正好已进行了倾翻过程,并且在该倾翻过程中,斜角等于倾角α,则存在过渡状态。此外,设置有不倾翻的状态,在不倾翻的状态中,配属给具有角度的三角形1113的线段等于与配属给具有角度α的三角形1114的线段s1
α
。除此以外,存在倾翻的状态,在所述倾翻的状态中,倾角α的导数的量大于零,并且速度v为零,那就是说和v=0。
[0057]
图12示出了图3的倾角确定装置210的配属给图11的结构1100的实施形式1105。在
此,倾角确定装置1105构造成,经由两个直角三角形1112、1113的三角学关系来确定倾角α,其中为此两个三角形1112、1113中的线段y1一样大。优选地,确定在具有倾角α的三角形1112中的线段y1或线段y1
α
,并且在具有斜角的三角形1113中确定线段y1,或确定线段。这两个线段y1
α
、利用下列公式来计算:利用下列公式来计算:。
[0058]
这样,从这两个公式的方程组中可以计算倾角α,所述倾角α优选地在计算单元1102中利用优选地下列公式来确定:1102中利用优选地下列公式来确定:1102中利用优选地下列公式来确定:。
[0059]
图13示出了图3的倾翻识别装置220的实施形式1150,所述倾翻识别装置220优选地将在图11中所描述的状态之一配属给童车100。在此,针对优选地三个状态中的每个状态,都设置有识别单元1110、1120、1130,其中识别单元1110根据线段s1
α
和识别出不倾翻的第二状态,识别单元1120根据倾角α和斜角识别出在倾翻之后的过渡,并且其中识别单元1130根据倾角的导数的量或倾角变化和童车100的速度v识别出倾翻。优选地,向评估单元1140发送由识别单元1110、1120、1130确定的状态,所述评估单元1140在探测到倾翻时优选地激活制动设备250。替选地或者可选地,评估单元1140可以构造成,在探测到倾翻时,关断(尤其是驱动轮132的)下坡从动分量。在此,经由下列公式确定识别单元1110、1120、1130的所需的输入变量或线段s1
α
和、斜角和/或倾角的导数的量及童车100的速度v:的速度v:的速度v:的速度v:的速度v:的速度v:的速度v:
。
[0060]
图14示出了示例性的三维曲线图1210,其中在轴线1211上标注有单位为m/s的速度v,在轴线1212上标注有单位为rad/s的负的角加速度ω,以及在轴线1213上标注有分别以度为单位的倾角α和斜角。在此,图14解释清楚了,优选地从斜角> 20
°
起,消除了斜率或倾斜。除此以外,优选地仅在童车100的速度或行进速度v小的情况下,才识别出倾翻。在此,通过对斜率或斜角的合理性检查,进行倾翻的确定。
[0061]
图15示出了图2的碰撞识别装置230的构建方案,所述碰撞识别装置230根据加速度a来探测童车100的碰撞。优选地,碰撞识别装置230在此在童车100的启动与碰撞或推开(wegschubsen)之间进行区分,其中这依据童车100的加速度变化的大小来进行。
[0062]
在此,给碰撞识别装置230配属有计算单元1510,所述计算单元1510优选地构造成,计算加速度a的导数,即所谓的跳动。跳动紧接着在比较单元1520中与预先给定的、优选地可设定的阈值sw进行比较。如果所确定的跳动大于阈值sw,则存在碰撞,并且碰撞识别装置230优选地激活制动设备250。
[0063]
图16示出了具有坐标系1613的曲线图1600,所述坐标系1613具有横坐标1611,在该横坐标1611上标注有单位为秒s的时间t,并且所述坐标系1613具有纵坐标1612,在该纵坐标1612上标注有单位为m/s的(尤其是童车100的)速度v。在此,给曲线图1600配属有速度时间曲线1615,其中曲线1615从时刻t1起具有示例性的指数变化过程。优选地,童车100直至时刻t1都处于静止状态中,并且从时刻t1起开始运动。
[0064]
图17示出了具有坐标系1623的曲线图1620,所述坐标系1623具有横坐标1621,在该横坐标1621上标注有单位为秒s的时间t,并且所述坐标系1623具有纵坐标1622,在该纵坐标1622上标注有单位为m/s
2
的加速度a。在此,给曲线图1620配属有加速度时间曲线1625,所述加速度时间曲线1625在时刻t1具有比较陡的斜率,并且在达到顶点之后平坦地下降。
[0065]
图18示出了具有坐标系1633的曲线图1630,所述坐标系1633具有横坐标1631,在该横坐标1631上标注有单位为秒s的时间t,并且所述坐标系1633具有纵坐标1632,在该纵坐标1632上标注有单位为m/s
3
的跳动。在此,给曲线图1630配属有跳动时间曲线1635以及阈值1637。曲线1635在时刻t1比较陡地上升,直至顶点1636,并且此后又相对快地下降。顶点1636说明性地在阈值1637之上,由此碰撞识别装置230探测到碰撞,并且优选地激活制动设备260。
[0066]
图19示出了图1的具有图3的质量确定单元240的童车100。在此,图19示出了说明性地四个车轮116-122,其中两个车轮116、118构造为用于使童车100转向的转向滚轮,并且其中车轮120、122构造为驱动轮132。在此,沿纵向2119远离童车100的重心s为间距l1地布置有驱动轮132。此外,这两个驱动轮132沿着童车100的横向彼此间隔了间距d。在此,重力fg的y分量fgy也作用在重心s中。优选地,在童车100运动时,力f
mot1
、f
mot2
分别对驱动轮132起作用,所述力f
mot1
、f
mot2
在图19中说明性地朝向右地绘出。
[0067]
优选地,基于对至少一个驱动轮132起作用的力f
mot1
、f
mot2
和分别探测到的加速度a,质量确定单元240确定在静止状态中和/或在制动过程中的童车100的质量m。在此,如果童车100通过位置调节装置被保持在斜坡处或在图1的斜面114上并且用户没有抓紧童车
100,也就是如果童车100唯一地通过位置调节装置被保持在静止状态中,则在静止状态中进行质量确定。这样的位置调节装置从现有技术中是已知的,因此在本发明为了本发明的简洁目的而省去深入的描述。在此,经由下列公式确定质量:。
[0068]
如果位置调节装置识别出用户在场,则关断质量确定单元240。
[0069]
图20示出了图3的质量确定单元240,所述质量确定单元240构造用于在制动过程期间进行质量估计,其中所述质量确定单元240根据一实施形式利用rls算法2110来实现。在此,在制动过程期间,利用rls算法2110估计质量m,以便改善制动特性。在此,通过rls算法2110来求解下列方程:。
[0070]
优选地,rls算法2110作为输入变量具有至少示例性的两个力f
mot1
、f
mot2
、加速度a和否定-1;可选地,斜角可以构造为输入变量。作为所估计的输出变量,rls算法2110提供用户力fu以及质量m。
[0071]
图21示出了配属给图3的质量确定单元240的转矩时间曲线图2210以及转速时间曲线图2220。转矩时间曲线图2210具有曲线2215,其中设置有横坐标2211和纵坐标2212,在所述横坐标2211上标注有时间t,在所述纵坐标2212上标注有转矩m。曲线2215优选地具有近似指数升高的变化过程。在时刻t2处,超过转矩的示例性的阈值2202,所述阈值表征制动过程。
[0072]
转矩时间曲线图2210优选地具有横坐标2221和纵坐标2222,在所述横坐标2221上标注有时间t,在所述纵坐标2222上标注有驱动轮132的转速n。说明性地,配属给转矩时间曲线图2210的曲线2225直至时刻t2近似恒定地伸展,并且紧接着下降直至童车100的静止状态。在此,区域2229或曲线2225的下降描述了童车100的制动过程。
[0073]
图22示出了图3的质量确定单元240的其他实施形式2300,其中类似于质量确定单元240来估计童车100的质量m,并且其中设置有正反馈调节装置2300。优选地,基于所估计的质量和通过童车100的用户加载到童车100上的加速度da/dt,正反馈调节装置2300适配童车100的质量m或m_supp。因此,质量值或辅助程度可能没有直接的质量估计的也行。在此,通过加速度的变化da和通过加速度a,设定童车100的质量或辅助,所述质量或辅助视用户的行为而定地来设定。如果用户加速,则通过正反馈调节装置2300提高质量值m_supp,并且由此提高辅助。如果辅助得过多,则用户开始降低加速度值,并且由此降低加速度的变化da。借此,保留或者降低辅助程度,并且独立地设定辅助程度。
[0074]
正反馈调节装置2300优选地具有调节段2310,给所述调节段2310输送用户力fu、针对斜面114的项g*sin和马达力或这两个力f
mot1
、f
mot2
,它们在求和点2311中相加。紧接着,实现计算级2312或1/m,其中给计算级2313或1/s输送加速度a和加速度a,以便确定速度v。优选地,进一步为了进行创建,加速度a被导向参考特性曲线2320,并且被导向其他计算级2322或da/dt。在此,借助参考特性曲线2320,根据加速度a确定所估计的质量m。利用在调节级2322中确定的加速度变化da,在计算级k中紧接着为了控制辅助程度而确定针对da的放大率,并且作为质量变化dm输出。那么,在求和点2324处,将所估计的质量m和质量变化dm
求和,其中所估计的质量m优选地被相加,而质量变化dm优选地被减去。优选地,其后是计算级2325和计算级2326,其中给计算级2326优选地配属有低通滤波器的时间常数ts。在优选地两个计算级2325、2326之后,获得质量值m_supp。质量值m_supp紧接着与重力和sin或g*sin组合,其中由此的结果作为马达力又被输送给调节段2310。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips