
 商标分类
商标分类  商标转让
商标转让 
一种自行车智能助力轮毂及控制方法与流程
 2021-02-07 10:02:44|
2021-02-07 10:02:44| 362|
362| 起点商标网
起点商标网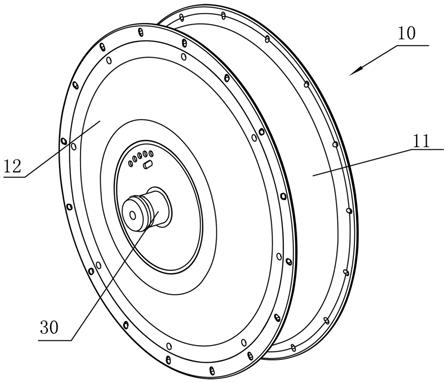
[0001]
本发明涉及自行车领域,特别是一种自行车智能助力轮毂及控制方法。
背景技术:
[0002]
自行车,又称脚踏车或单车,通常是二轮的小型陆上车辆。现在的自行车一般为人工脚踏的人力自行车或电动自行车。人力自行车,在长时间骑行后,会产生疲累感;而现有的电动自行车一般通过车把手控制电机输出功率以进行骑行,然而这种类型的电动自行车,结构复杂,兼容性差,不能实时根据路况及负载调整输出功率。
技术实现要素:
[0003]
针对上述问题,本发明提供了一种自行车智能助力轮毂,结构简单,自动启动控制电机输出功率,为骑行提供助力。
[0004]
本发明采用的技术方案为:一种自行车智能助力轮毂,包括轮毂壳体,设于轮毂壳体内的电机,以及与电机连接的轮轴;其特征在于:所述的轮毂壳体内封装有微控制器单元、陀螺仪传感器单元及电池;其中:微控制器单元,用于连接控制电机启动运行和控制电机输出功率;陀螺仪传感器单元,用于检测自行车车速,在自行车车速达到预设值时,为微控制器单元提供电机启动运行控制信号;电池,用于为电机、微控制器单元和陀螺仪传感器单元提供工作电源。
[0005]
优选地,所述陀螺仪传感器单元还能用于检测自行车前后倾斜角度,为微控制器单元提供电机输出功率调节信号。
[0006]
优选地,所述轮轴与电机的转子之间通过称重片支撑连接,称重片与微控制器单元连接,为微控制器单元提供自行车载重信号。
[0007]
优选地,所述陀螺仪传感器单元采用集成加速度计和陀螺仪的bmi160型惯性测量ic。
[0008]
优选地,所述陀螺仪传感器单元采用mipu6050型陀螺仪。
[0009]
优选地,所述微控制器单元和陀螺仪传感器单元设于环形pcb板上,pcb板固定于电机的定子支架上,所述电池的各电芯以轮轴为中心环形分布于电机的定子支架中。
[0010]
本发明还提供一种自行车智能助力轮毂的控制方法,其特征在于:所述控制方法包括有启动控制方法和电机输出控制调节方法;所述启动控制方法由微控制器单元根据陀螺仪传感器单元检测自行车从静止状态变化到行驶状态后,控制电机启动运行,输出预设的功率,为自行车行驶提供助力;所述电机输出控制调节方法由微控制器单元在自行车行驶过程中根据陀螺仪传感器单元检测自行车前后倾斜角度,判断上坡或下坡,在判断为上坡时,微控制器单元根据上坡角度控制电机输出功率增加到预设匹配值;在判断为下坡时,微控制器单元根据下坡角度
控制电机输出功率减小到预设匹配值。
[0011]
优选地,所述陀螺仪传感器单元检测自行车从静止状态变化到时速为3km/h时行驶状态后,控制电机启动运行;当陀螺仪传感器单元检测自行车从行驶状态变化静止状态后的预设时间后延时关机。
[0012]
优选地,所述微控制器单元控制电机启动运行后,非上下坡状态,电机持续为自行车行驶提供10n
·
m助力。
[0013]
优选地,所述电机为在下坡状态进行电能回收的永磁电机。
[0014]
与现有技术相比,本发明的有益效果在于:本发明提供一种自行车智能助力轮毂,当自行车从静止状态变化到行驶状态后,在自行车车速达到预设值时,陀螺仪传感器单元为微控制器单元提供电机启动运行控制信号,电机为骑行提供助力,这样自动启动电机,方便骑行者骑行,并能根据路面状况和负载情况,自动实时调整电机输出功率,降低骑行者的劳累;同时整体结构简单,方便对普通自动车的改造升级。
附图说明
[0015]
图1,为本发明提供的一种自行车智能助力轮毂的示意图一;图2,为本发明提供的一种自行车智能助力轮毂的示意图二;图3,为本发明提供的一种自行车智能助力轮毂的爆炸图;图4,为本发明提供的一种自行车智能助力轮毂的剖视图;图5,为本发明提供的一种自行车智能助力轮毂中电池的示意图;图6,为本发明提供的一种自行车智能助力轮毂的电路方框图;图7,为本发明提供的一种自行车智能助力轮毂中微控制器单元和陀螺仪传感器单元的电路原理图;图8,为本发明提供的一种自行车智能助力轮毂中另一种实施方式的陀螺仪传感器单元的电路原理图;图9,为本发明提供的一种自行车智能助力轮毂中电机的驱动电路原理图;图10,为本发明提供的一种自行车智能助力轮毂中称重片的电路原理图。
具体实施方式
[0016]
根据附图对本发明提供的优选实施方式做具体说明。
[0017]
图1至图10,为本发明提供的一种自行车智能助力轮毂的优选实施方式。如图1至图10所示,该自行车智能助力轮毂包括轮毂壳体10,设于轮毂壳体内的电机20,以及与电机连接的轮轴30;所述的轮毂壳体10内封装有微控制器单元40、陀螺仪传感器单元50及电池60;其中:微控制器单元40,用于连接控制电机启动运行和控制电机输出功率;陀螺仪传感器单元50,用于检测自行车车速,在自行车车速达到预设值时,为微控制器单元提供电机启动运行控制信号;电池60,用于为电机20、微控制器单元40和陀螺仪传感器单元50提供工作电源,当自行车由静止状态转换为运行状态,自行车车速达到预设值时,陀螺仪传感器单元50为微控制器单元40提供电机启动运行控制信号,电机20启动为骑行提供助力,这样自动启动电机,方便骑行者骑行,降低骑行者的劳累。
[0018]
所述陀螺仪传感器单元50还能用于检测自行车前后倾斜角度,为微控制器单元提
供电机输出功率调节信号,根据路况是上坡或下坡,陀螺仪传感器单元40向微控制器单元提供电机输出功率调节信号,微控制器单元调节电机的输出功率,例如在上坡时,微控制器单元40调节电机20的增大输出功率;而在下坡时,微控制器单元40调节电机20的减小输出,或者控制电机进行反向电能回收,这样根据路面状况,实时调整电机的输出功率,简单方便。
[0019]
所述轮轴30与电机的转子之间通过称重片70支撑连接,称重片70与微控制器单元40连接,为微控制器单元40提供自行车载重信号,当骑行状态时,骑行者骑行在自行车上,以及自行车负载时,负载以及骑行者的重量使得称重片70发生形变,根据微控制器单元40根据称重片70采集的人体重量信号,调节电机的输出功率。如图10所示,称重片70内部的电阻应变片r105和r106分别处于轮轴30的两端,利用电阻应变片变形时其电阻也随之改变的原理,将质量信号转换成可测量的电信号输出给微控制器单元40。
[0020]
如图3和图4所示,所述微控制器单元40和陀螺仪传感器单元50设于环形pcb板80上,pcb板80固定于电机20的定子支架21上,所述电池的各电芯以轮轴为中心环形分布于电机的定子支架中。电池60封装在电池盒61中,电池盒61套在电机的定子支架上。图7为微控制器单元40和陀螺仪传感器单元50的电路原理图,图中的u4单元即为微控制器单元40,微控制器单元40采用stm32f103c8t6芯片;图中u11单元为陀螺仪传感器单元50,陀螺仪传感器单元50采用集成加速度计和陀螺仪的bmi160型惯性测量ic。具体实施过程中,如图8所示,所述陀螺仪传感器单元50可采用mipu6050型陀螺仪代替集成加速度计和陀螺仪的bmi160型惯性测量ic。
[0021]
所述轮毂壳体10包括轮毂本体11和与轮毂本体11配合的轮毂盖体12,微控制器单元40、陀螺仪传感器单元50及电池60封装在轮毂本体11和轮毂盖体12之间,轮轴30的两端穿过分别穿过轮毂本体11和轮毂盖体12。
[0022]
另外,该电机20可以是永磁铁电机,在下坡状态时,为电池60充电。
[0023]
本发明还提供一种自行车智能助力轮毂的控制方法,所述控制方法包括有启动控制方法和电机输出控制调节方法;所述启动控制方法由微控制器单元40根据陀螺仪传感器单元50检测自行车从静止状态变化到行驶状态后,控制电机20启动运行,输出预设的功率,为自行车行驶提供助力;所述电机输出控制调节方法由微控制器单元40在自行车行驶过程中根据陀螺仪传感器单元50检测自行车前后倾斜角度,判断上坡或下坡,在判断为上坡时,微控制器单元40根据上坡角度控制电机输出功率增加到预设匹配值;在判断为下坡时,微控制器单元40根据下坡角度控制电机20输出功率减小到预设匹配值。
[0024]
作为一种实施方式,所述陀螺仪传感器单元50检测自行车从静止状态变化到时速为3km/h时行驶状态后,控制电机20启动运行;当陀螺仪传感器单元50检测自行车从行驶状态变化静止状态后的预设时间后延时关机。
[0025]
所述微控制器单元控制电机启动运行后,非上下坡状态,电机持续为自行车行驶提供10n
·
m助力。
[0026]
综上所述,本发明的技术方案可以充分有效的实现上述发明目的,且本发明的结构及功能原理都已经在实施例中得到充分的验证,能达到预期的功效及目的,在不背离本发明的原理和实质的前提下,可以对发明的实施例做出多种变更或修改。因此,本发明包括一切在专利申请范围中所提到范围内的所有替换内容,任何在本发明申请专利范围内所作
的等效变化,皆属本案申请的专利范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips