
 商标分类
商标分类  商标转让
商标转让 
足式机器人的头部电路的制作方法
 2021-02-07 10:02:40|
2021-02-07 10:02:40| 443|
443| 起点商标网
起点商标网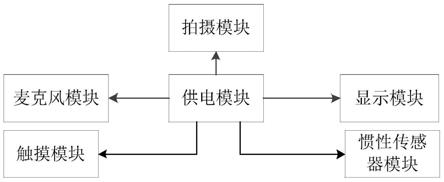
[0001]
本发明涉及足式机器人的电路领域,具体涉及一种足式机器人的头部电路。
背景技术:
[0002]
足式机器人是一种通过仿生动物关节来实现轮式机器人无法实现的动作与功能,例如足式机器人可以完成跳跃、攀爬等需要关节的辅助才能够实现的功能。现有的足式机器人为了方便其运动,通常不设置头部,这样的足式机器人从外观来看仿生效果不好。另外,现有的足式机器人的功能不全,补充足式机器人的头部能够完善足式机器人的功能。
技术实现要素:
[0003]
为解决现有的足式机器人的功能不足的问题,本发明的实施例公开了一种足式机器人的头部电路,其包括拍摄模块,所述拍摄模块拍摄图像,所述图像用于采集所述足式机器人的视觉数据;麦克风模块,所述麦克风模块采集外部环境的声音数据;显示模块,所述显示模块用于显示所述足式机器人的状态数据;以及供电模块,所述供电模块用于为所述拍摄模块、所述麦克风模块以及所述显示模块供给电能。
[0004]
根据本发明的实施例,所述足式机器人的头部电路还包括:触摸模块,所述触摸模块与所述供电模块电连接,所述供电模块向所述触摸模块供给电能。
[0005]
根据本发明的实施例,所述足式机器人的头部电路还包括:惯性传感器模块,所述惯性传感器单元与所述供电模块电连接,所述惯性传感器单元用于测试所述足式机器人的头部的位姿。
[0006]
根据本发明的实施例,所述供电模块包括mcu主板以及与所述mcu主板电连接的hub扩展板。
[0007]
根据本发明的实施例,所述mcu主板上设置有电源输出单元、电源输入单元以及数据接收单元,所述电源输出单元包括5v输出端口以及12v输出端口;所述电源输入单元包括第一can总线输入端口以及第二can总线输入端口,所述第一can总线输入端口用于与所述麦克风模块电连接,所述第二can总线输入端口用于与所述足式机器人的颈部电连接;所述数据接收单元包括触摸输入端口以及惯性传感器输入端口,所述触摸输入端口与所述触摸模块数据联通,所述惯性传感器输入端口与所述惯性传感器模块数据联通。
[0008]
根据本发明的实施例,所述麦克风模块包括第一输出端口以及第二输出端口,所述第一输出端口用于输出所述麦克风模块的数字数据,所述第二输出端口用于输出所述麦克风模块的音频数据。
[0009]
根据本发明的实施例,所述足式机器人的头部电路还包括补光模块,所述补光模块与所述供电模块的所述mcu主板电连接,所述供电模块对所述补光模块供给电能。
[0010]
根据本发明的实施例,所述足式机器人的头部电路还包括核心功能板,所述核心功能板用于为所述拍摄模块、所述麦克风模块、所述显示模块以及所述供电模块提供工作信号。
[0011]
通过采用上述技术方案,本发明主要有如下几点技术效果:
[0012]
1、拍摄模块与麦克风模块获取足式机器人周围环境的图像信息与声音信息,使得足式机器人能够利用获取到的图像信息以及声音信息来进行导航、语音交互等行为以丰富足式机器人的功能;
[0013]
2、惯性传感器模块获取足式机器人头部的位姿信息,足式机器人根据头部的位姿信息调整足式机器人头部的位置与姿态以获取不同方位的信息;
[0014]
3、为适配不同的模块,mcu主板上设置有多种电源输出端口以及电源输入端口,通过can总线总体供电保证供电和数据传输的稳定性。
附图说明
[0015]
图1为根据本发明的实施例的足式机器人的头部电路的示意图;
[0016]
图2为根据本发明的实施例的拍摄模块的示意图;
[0017]
图3为根据本发明的实施例的供电模块的示意图。
具体实施方式
[0018]
下面结合说明书附图来说明本发明的具体实施方式。
[0019]
请一并参照图1至图3,本发明公开了一种足式机器人的头部电路,其通过足式机器人的颈部与足式机器人的躯体相连,包括拍摄模块、麦克风模块、显示模块以及供电模块,其中拍摄模块拍摄图像,拍摄模块拍摄的图像用于采集足式机器人的视觉数据,麦克风模块采集外部环境的声音数据,显示模块用于显示足式机器人的状态数据,供电模块用于为拍摄模块、麦克风模块以及显示模块供给电能。
[0020]
为丰富拍摄模块拍摄的图像内包含的视觉数据以使足式机器人能够实现测距以及实时导航,本实施例中的拍摄模块包括有深度相机以及rgb相机,深度相机拍摄出的图像中包含有深度信息,足式机器人运用深度信息计算足式机器人与对应物体之间的距离,rgb相机拍摄的图像中包含了色彩信息,足式机器人通过色彩信息能够进行人物提取以及其他的边界划分的工作以保证足式机器人运行的稳定性。同时,本实施例中的深度相机通过usb3.0 type c接口转type a的连接方式与供电模块电连接以保证深度相机运行的稳定性,rgb相机通过usb2.0接口通过屏蔽线与供电模块电连接。为提高麦克风模块的收音效果,本实施例中的麦克风模块采用麦克风阵列的形式设置,同时,麦克风模块通过usb2.0屏蔽线与供电模块电连接。本实施例中的显示模块为3.81寸oled屏幕,显示模块的供电输入通过usb与供电模块电连接,显示模块的视频显示输入通过hdmi线路与足式机器人的主板相连以显示足式机器人的状态数据,本实施例中的足式机器人的状态数据包括但不限于足式机器人的电量、温度、行进路线以及环境数据等。
[0021]
为方便使用人员对足式机器人进行控制,本实施例中的足式机器人的头部电路还包括有触摸模块,触摸模块与供电模块电连接,触摸模块与足式机器人的主板数据联通,本实施例中的触摸模块包括有四个触摸按键以对足式机器人的不同的功能进行控制,例如对足式机器人播放的声音的大小的控制,开关足式机器人的拍摄模块的功能等。本实施例中的触摸模块中的四个触摸按键与供电模块电连接且数据联通。同时,为了能够检测足式机器人的头部的位姿信息,本实施例中的足式机器人的头部还包括有惯性传感器模块,本实
施例中的惯性传感器模块为9轴惯性传感器,惯性传感器模块检测足式机器人的头部的位姿信息,在足式机器人的头部位姿发生异常或需要足式机器人的头部转动至指定角度来拍摄特定物品的角度时,惯性传感器模块核对足式机器人的头部是否已经转动至指定角度以保证足式机器人的头部的工作过程的稳定性。
[0022]
为保证供电模块能够对足式机器人的头部的各个模块进行稳定供电,本实施例中的供电模块包括mcu主板以及与mcu主板电连接的hub扩展板。本实施例中的mcu主板上设置有电源输出单元、电源输入单元以及数据接收单元,mcu主板通过电源输入单元与足式机器人的总供电电源电连接,mcu主板通过电源输出单元与其他模块电连接以对其他模块进行供电。电源输出单元包括5v输出端口以及12v输出端口,本实施例中的hub扩展板与其中一个12v输出端口电连接以扩展mcu主板的电源输出接口,拍摄模块以及麦克风模块均与hub扩展板电连接以获取电能,此外,本实施例中的hub扩展板还与足式机器人的主板数据联通,拍摄模块以及麦克风模块采集的数据信息也通过hub扩展板传输至足式机器人的主板中,在此对hub扩展板与足式机器人的主板之间的数据联通的方式不做限定,本实施例中的hub扩展板与足式机器人的主板之间通过usb3.0的方式数据联通。mcu主板的电源输入单元包括第一can总线输入端口以及第二can总线输入端口,其中第一can总线输入端口用于与麦克风模块数据连接,第二can总线输入端口用于与足式机器人的颈部电连接;数据接收单元包括触摸输入端口以及惯性传感器输入端口,触摸输入单元与触摸模块数据联通,惯性传感器输入端口与惯性传感器模块数据联通。
[0023]
此外,本实施例中的麦克风模块包括有第一输出端口以及第二输出端口,第一输出端口用于输出麦克风模块的数字数据,第二输出端口用于出书麦克风模块的音频数据。通过将麦克风模块的数字数据与音频数据分别输出,足式机器人对麦克风模块的数据进行全方位接收。本实施例中的麦克风模块的第一输出端口与hub扩展板数据联通,第二输出端口与第一can总线输入端口相连,第一can总线输入端口除了进行电源输入之外还进行了音频输出的功能。
[0024]
为保证足式机器人能够在光线条件不好的条件下进行正常工作,本实施例中的足式机器人的头部还包括补光模块,补光模块为足式机器人提供光源以保证足式机器人能够有良好的光线条件进行工作。同时,本实施例中的足式机器人的头部电路还包括用于为拍摄模块、麦克风模块、显示模块以及供电模块提供工作信号的核心功能板,核心功能板设置在足式机器人的头部或足式机器人的其他部位内以对足式机器人的头部内的各个功能模块提供工作信号。
[0025]
此外,本实施例中的足式机器人的颈部包括有两个颈部电机,两个颈部电机的供电均有mcu主板的第二can总线输入端口进行供电,两个颈部电机分别实现两个自由度的活动,足式机器人的头部能够完成两个自由度的转动从而能够实现足式机器人的头部的自由活动。
[0026]
以上实施方式仅用于说明本发明,而并非对本发明的限制,有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本发明的范畴,本发明的专利保护范围应由权利要求限定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips