
 商标分类
商标分类  商标转让
商标转让 
电动单车及电动单车的控制方法与流程
 2021-02-07 06:02:49|
2021-02-07 06:02:49| 344|
344| 起点商标网
起点商标网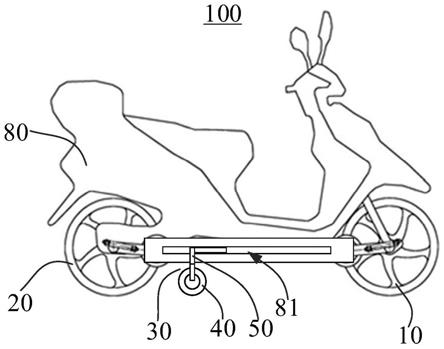
[0001]
本公开涉及自动驾驶技术领域,具体地,涉及一种电动单车及电动单车的控制方法。
背景技术:
[0002]
随着物流行业的迅速发展,智能配送行业中的无人配送车逐渐成为技术热点。无人配送车可以节约人力资源,有效地提升处理量。目前两轮无人配送车(简称电动单车)中主要使用车身内部的陀螺仪来保持平衡,在自动行驶时,陀螺仪需要始终保持运转,这样会消耗较多的电量,从而使得两轮无人配送车的续航能力也远小于普通电单车。
技术实现要素:
[0003]
本公开的目的是提供一种电动单车,在基本维持电动单车的平衡的同时,还不会额外过多地增加电动单车的能耗。
[0004]
为了实现上述目的,本公开提供一种电动单车,其包括车架、前轮、后轮、辅助轮机构、驱动机构和控制组件,所述前轮和所述后轮设置在所述车架的前后两端,所述辅助轮机构包括位于所述车架的左右两侧的辅助轮,其中,所述车架的每一侧设置至少一个所述辅助轮,所述驱动机构设置于所述车架并用于带动所述辅助轮机构沿前后方向移动,
[0005]
所述控制组件包括控制器和用于测量所述电动单车的车速的第一传感器,所述控制器分别与所述第一传感器和所述驱动机构信号连接,用于根据所述车速控制所述驱动机构,以使所述辅助轮机构前后移动。
[0006]
可选地,所述辅助轮机构还包括沿所述电动单车的前后方向可移动地设置于所述车架的移动支架,所述移动支架的左右两侧的每一侧各设置至少一个所述辅助轮所述驱动机构与所述移动支架传动连接。
[0007]
可选地,所述车架上设置有沿前后方向延伸的滑槽,所述移动支架包括连接件和连接在所述连接件两端的支柱,其中,所述连接件的每一端连接至少一根所述支柱,所述辅助轮设置于所述支柱的底端,所述连接件横跨所述车架并与所述滑槽滑动配合。
[0008]
可选地,所述连接件为由第一连接段、第二连接段和第三连接段依次连接形成的u型结构,所述u型结构朝向所述车架的后方开口,其中所述支柱分别连接在所述第一连接段或所述第三连接段的外端。
[0009]
可选地,所述辅助轮机构还包括设置在所述辅助轮和所述车架之间的调节机构,所述调节机构用于调节所述辅助轮和所述车架的距离,所述支柱包括第一支柱段和第二支柱段,所述第一支柱段滑动套设于所述第二支柱段以使所述支柱整体上可伸长或缩短,所述调节机构包括设置在所述第一支柱段和所述第二支柱段之间,用于复位缩短的所述支柱的复位件,所述第一支柱段远离所述第二支柱段的一端与所述连接件固定连接,所述第二支柱段远离所述第一支柱段的一端设置有所述辅助轮。
[0010]
可选地,所述复位件包括弹性件,所述弹性件的两端分别连接于所述第一支柱段
和所述第二支柱段,所述弹性件配置为在所述支柱缩短时储能。
[0011]
可选地,所述支柱沿所述电动单车的左右方向朝远离所述车架的方向倾斜,且所述支柱与所述第二连接段的夹角为钝角。
[0012]
可选地,所述移动支架包括两根支柱,所述两根支柱上的两个所述辅助轮与所述后轮的距离相同,当所述辅助轮位于所述前轮和所述后轮的连线的中垂线处时,所述后轮、两个所述辅助轮之间的连线构造成等边三角形。
[0013]
可选地,所述车架上还设置有限位结构,当所述辅助轮处于所述前轮和所述后轮连线的中垂线处时,所述限位结构抵顶于所述移动支架以限制所述辅助轮朝所述前轮方向移动时的最大位移。
[0014]
可选地,所述驱动机构包括传动组件和电机,所述传动组件包括相互配合的齿轮和齿条,所述电机与所述齿轮传动连接,所述齿条固定于所述移动支架上,或,
[0015]
所述驱动机构包括直线驱动器,所述直线驱动器与所述移动支架传动连接。
[0016]
可选地,所述控制组件还包括用于检测所述前轮受力的第二传感器和用于检测所述后轮受力的第三传感器,所述控制器还分别与所述第二传感器和所述第三传感器信号连接,用于在所述前轮悬空或所述后轮悬空时,控制所述辅助轮朝所述前轮和所述后轮连线的中垂线处移动。
[0017]
通过上述的技术方案,通过设置能够前后移动的辅助轮机构能够通过动态调整辅助轮机构相对于前后轮的位置,实现了电动单车在自动驾驶或辅助驾驶状态下的平衡性和安全性。而且,实现电动单车的平衡的同时,仅耗费了少量的能耗。另外,由于能够保持高速和低速状态下的电动单车的平衡,从而能够拓展电动单车自动驾驶的车速范围和应用场景。
[0018]
根据本公开的另一方面,还提供一种电动单车的控制方法,用于控制上述的任一项所述的电动单车,所述方法包括:
[0019]
检测所述电动单车的车速;
[0020]
判断所述车速是否大于等于第一车速阈值或小于等于第二车速阈值,其中,所述第一车速阈值大于所述第二车速阈值;
[0021]
在所述车速大于或等于所述第一车速阈值时,控制所述驱动机构,使所述辅助轮机构朝所述后轮方向移动,或,在所述车速小于或等于所述第二车速阈值时,控制所述驱动机构,使所述辅助轮机构朝所述前轮方向移动。
[0022]
可选地,在判断所述车速是否大于等于第一车速阈值或小于等于第二车速阈值之前,所述方法还包括:
[0023]
检测所述电动单车的所述前轮和所述后轮的受力值;
[0024]
当所述受力值小于等于所述受力阈值时,
[0025]
控制所述电动单车的动力电机,以使所述电动单车的车速降低,并且控制所述驱动机构,使所述辅助轮机构朝所述前轮方向移动。
[0026]
本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
[0027]
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具
体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
[0028]
图1是一种示例性的电动单车的侧视示意图;
[0029]
图2是一种示例性的电动单车的辅助轮结构的俯视示意图,其中示出了滑槽;
[0030]
图3是一种示例性的电动单车的辅助轮结构的后视示意图;
[0031]
图4是一种示例性的电动单车的辅助轮结构的俯视示意图,其中示出了滑槽和驱动机构的一种实施方式;
[0032]
图5是一种示例性的电动单车的辅助轮结构的俯视示意图,其中示出了滑槽和驱动机构的另一种实施方式;
[0033]
图6是一种示例性的电动单车的控制原理图;
[0034]
图7是一种示例性的电动单车的控制方法的流程图。
[0035]
附图标记说明
[0036]
100-电动单车;80-车架;81-滑槽;10-前轮;20-后轮;30-辅助轮机构;40-辅助轮;50-移动支架;51-连接件;511-第一连接段;512-第二连接段;513-第三连接;514-开口;52-支柱;521-第一支柱段;522-第二支柱段;60-驱动机构;61-齿轮;62-齿条;63-直线驱动器;70-控制器;71-第一传感器;72-第二传感器;73-第三传感器。
具体实施方式
[0037]
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
[0038]
在本公开中,在未作相反说明的情况下,使用的方位词如“上、下、左、右、前、后”,指的是电动单车100处于水平面上的状态下定义的,与电动单车100正常行驶时的“上、下、左、右、前、后”的方向一致。此外,本公开实施例中使用的术语“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。
[0039]
为了能够保持电动单车100的平衡的同时,还不会额外过多地增加电动单车100的能耗,在本申请中提供了一种电动单车100和对该电动单车100的控制方法。如图1-6所示,根据本公开的一方面,提供了一种电动单车100。该电动单车100包括车架80、前轮10、后轮20、驱动机构60和控制组件。前轮10和后轮20设置在车架80的前后两端。辅助轮机构30包括位于车架80的左右两侧的辅助轮40,其中,车架80的每一侧设置至少一个辅助轮40,驱动机构60设置于车架80并用于带动辅助轮机构30沿前后方向移动。
[0040]
如图6所示,控制组件包括控制器70和用于测量电动单车100的车速的第一传感器71,控制器70分别与第一传感器71和驱动机构60信号连接,用于根据车速控制驱动机构60,以使辅助轮机构30前后移动。可选地,在一种实施方式中,第一传感器71可为速度传感器。
[0041]
本公开中各种实施方式中的电动单车100可以为无人配送车、无人驾驶电动单车100,也可以为手动驾驶的电动单车100等两轮单车。
[0042]
由于陀螺效应和两轮单车本身的平衡机制,速度快的两轮车相对于速度慢的两轮车更容易保持平衡。因此,当两轮单车的速度较快时,如何能够抵抗颠簸,如何平稳地转向等为首要考虑因素;而两轮单车速度较慢时,两轮单车容易发生左右侧翻,而路面的颠簸对平衡影响较小,速度慢,也便于转向,因此,此时如何能够维持电动单车100行驶时的平衡为首要考虑因素。
[0043]
第一传感器71获取到电动单车100的速度信息,并将速度信息传递给控制器70。控制器70根据当前行驶速度的大小进行判断,当控制器70判断出电动单车100的行驶速度过快时,控制器70向驱动机构60发出相应信息,通过驱动机构60控制辅助轮机构30朝后移动,辅助轮40移动至靠近后轮20处。一方面能够增加后轮20附近与地面接触的摩擦力,增加后轮20附近的支撑点的数量,当遇到颠簸时,由于后轮20两侧的辅助轮40的限制,后轮20不容易发生左右摇摆,从而能够增加电动单车100应对颠簸的能力,保持平衡。另一方面,辅助轮40移动至靠近后轮20处,远离前轮10,使得在转向时辅助轮40需要偏转的角度减小,甚至不需要偏转,因此,辅助轮40几乎不会限制电动单车100的转向,后移的辅助轮40增加了电动单车100转向的灵活性,便于电动单车100在高速状态下转向,从而能够保持电动单车100转向时的平衡。
[0044]
当控制器70判断出电动单车100行驶速度较慢时,通过驱动机构60控制辅助轮机构30朝前移动,使辅助轮40靠近前后轮20连线的中垂线处,此时,一方面辅助轮40靠近电动单车100的重心,能够对电动单车100进行更加有效的支撑,另一方面,此时,两侧的辅助轮40与后轮20能够共同形成稳定的三角形支撑结构,两侧的辅助轮40与前轮10也能够共同形成稳定的三角形支撑结构,通过前后的稳定的三角形支撑结构从而对电动单车100形成稳定的支撑,保持电动单车100的平衡。另外,电动单车100由于路况颠簸或者转向速度过快时导致前轮10翘起悬空或者后轮20翘起悬空时,辅助轮机构30向前后轮20连线中垂线处移动,以保证在意外情况下,能够对电动单车100进行支撑,保证电动单车100的平衡。
[0045]
以图1中的电动侧视图为例进行说明,“前后轮20连线的中垂线处”指的是,经过前轮10和后轮20的轴心的连线的中点的垂线。当辅助轮40处于前后轮20连线的中垂线处指的是,此时辅助轮40的轴心处于该连线的中点所在的竖直平面内,该竖直平面垂直于前后轮20轴心的连线,此时,在电动单车100的前后方向上,辅助轮40距离前轮10和后轮20的距离相等。
[0046]
上述技术方案中,通过设置能够前后移动的辅助轮机构30能够通过动态调整辅助轮机构30相对于前后轮20的位置,实现了电动单车100在自动驾驶或辅助驾驶状态下的平衡性和安全性。而且,实现电动单车100的平衡的同时,仅耗费了少量的能耗。另外,由于能够保持高速和低速状态下的电动单车100的平衡,从而能够拓展电动单车100自动驾驶的车速范围和应用场景。
[0047]
在本公开中对辅助轮机构30的具体结构不作限制,在一种实施方式中,如图2-5所示,辅助轮机构30包括沿电动单车100的前后方向可移动地设置于车架80的移动支架50。移动支架50的左右两侧的每一侧各设置至少一个辅助轮40,,驱动机构60与该移动支架50传动连接。驱动机构60驱动移动支架50沿前后方向水平移动,从而带动固定在移动支架50上的辅助轮40前后移动,保持电动车的平衡。
[0048]
在另一种实施方式中,电动单车100也可不设置移动支架50,电动单车100中设置有两套直线型驱动机构60,分别驱动左右两侧的辅助轮40,从而实现左右两侧的辅助轮40前后移动。
[0049]
在本公开中对移动支架50的具体结构不作限制,在一种实施方式中,如图1和图2所示,车架80上设置有沿前后方向延伸的滑槽81。移动支架50包括连接件51和连接在该连接件51两端的支柱52。其中,连接件51的每一端连接至少一根支柱52,支柱52与辅助轮40一
一对应。辅助轮40设置于支柱52的底端,支柱52的顶端固定于连接件51。连接件51横跨车架80并与滑槽81滑动配合。连接件51的两端从车架80的左右两侧伸出,并与支柱52的顶端连接。
[0050]
通过设置连接件51将左右两侧的支柱52连接,当辅助轮机构30前后移动时,能够保证左右两侧的辅助轮40的同步移动,从而有助于从电动单车100的左右两侧对电动单车100进行对称支撑,保证电动单车100的平衡性。
[0051]
为了使辅助轮40后移时,尽可能地靠近后轮20,在本公开的一种实施方式中,如图2所示,连接件51为由第一连接段511、第二连接段512和第三连接段513依次连接形成的u型结构,u型结构朝向车架80的后方开口,其中相应支柱52分别连接在第一连接段511和第三连接段513的外端。
[0052]
由于连接件51构造成开口514朝后的u型结构,当辅助轮机构30向后移动时,连接件51不会阻碍辅助轮40的后移,连接件51可避让滑动槽结构,使得辅助轮40能够尽可能地靠近后轮20处,从而增加电动单车100车速过快时的保持平衡的能力。而辅助轮机构30向前至多移动到前后轮20连线的中垂线处,因此,车架80上能够设置足够的空间使连接件51向前移动。
[0053]
可以理解的是,在其他实施方式中,连接件51还可构造成圆弧结构或构造成直线型结构。本公开中对连接件51的具体形状不作限制。
[0054]
为了保持转向时电动单车100的平衡性,辅助轮机构30还包括设置在辅助轮40和车架80之间的调节机构,该调节机构用于调节辅助轮40和车架80的距离,即调节辅助轮40的支撑长度。在一种实施方式中,支柱52包括第一支柱段521和第二支柱段522。第一支柱段521滑动套设于第二支柱段522以使支柱52整体上可伸长或缩短。调节机构包括设置在第一支柱段521和第二支柱段522之间,用于复位缩短的支柱52的复位件。第一支柱段521远离第二支柱段522的一端与连接件51固定连接,第二支柱段522远离第一支柱段521的一端设置有辅助轮40。
[0055]
当电动单车100转向时,电动单车100向相应侧倾斜,使得相应侧的支柱52整体长度缩短,适应电动单车100的倾斜,并依靠该支柱52对电动单车100进行支撑。通过设置调节机构,能够根据电动单车100的转向方向和转向角度来适应性的缩短支柱52的长度,从而能够对转向时的电动单车100进行有效的支撑,保证转向时的电动单车100的平衡性。当电动单车100的转向完成后,在复位件的作用下,支柱52复位,从而通过左右两侧的支柱52对电动单车100进行支撑。
[0056]
在本公开对复位件具体如何使支柱52复位不作限制,在一种实施方式中,复位件包括弹性件(未示出),弹性件的两端分别连接于第一支柱段521和第二支柱段522,弹性件配置为在支柱52缩短时储能。
[0057]
当电动单车100转向时,电动单车100向相应侧倾斜,此时位于这一侧的第一支柱段521和第二支柱段522会挤压设置于二者之间的弹性件,弹性件缩短,使得相应侧的支柱52整体长度缩短。当电动单车100的转向完成后,在弹性件的弹力的作用下,第一支柱段521和第二支柱段522相互远离,支柱52复位,从而通过左右两侧的支柱52对电动单车100进行支撑。
[0058]
在其他实施方式中,还可通过其他结构来调节辅助轮40和车架80之间的距离。例
如,设置能够驱动第一支柱段521伸出或缩回的电机,控制器70根据具体转弯角度,主动控制相应侧的电机,从而使得在电动单车100转向时,第一支柱段521主动缩回相应地长度,使得支柱52整体上长度缩短,当转向完成后,电机驱动第一支柱段521反向移动,从第二支柱段522中伸出,使得支柱52复位。
[0059]
在一种实施方式中,为了防止第一支柱52和第二支柱52的分离,第二支柱52的内壁上设置有挡块,以限定第一支柱52向上移动的最大位移。而且,第二支柱52的内壁还可设置用于对第一支柱52的上下滑动进行导向的导向槽,相应地,第一支柱52的外壁上设置与该导向槽配合的导向块。
[0060]
在本公开的一种实施方式中,如图3所示,支柱52沿电动单车100的左右方向朝远离车架80的方向倾斜,且支柱52与第二连接段512的夹角为钝角。左右两侧的支柱52朝远离车架80的方向倾斜设置。当电动单车100发生侧倾时,使得位于该侧的支柱52能够与前后轮20共同形成稳定的三角支撑关系,从而能够增加电动单车100的平衡性。
[0061]
可以理解的是,在其他实施方式中,支柱52也可垂直地面的方向延伸。
[0062]
在本公开中对支柱52的具体数量不作限制,在一种实施方式中,如图2-3所示,移动支架50包括两根支柱52,两根支柱52上的两个辅助轮40与后轮20的距离相同,当辅助轮40位于前轮10和后轮20的连线的中点处时,后轮20、两个辅助轮40之间的连线构造成等边三角形,相应地,前轮10、两个辅助轮40之间的连线也构造成等边三角形。由于等边三角形的稳定性较好,因此,当辅助轮40位于前后轮20连线的中间位置时,前后轮20与位于二者之间的两个辅助轮40形成的两个等边三角形能够对电动单车100形成稳定的支撑,保证电动单车100的良好的平衡性。
[0063]
为了限制辅助轮机构30向前移动的最大位移,在本公开的一种实施方式中,车架80上还设置有限位结构(未示出),当辅助轮40处于前轮10和后轮20连线的中垂线处时,限位结构抵顶于移动支架50以限定辅助轮40朝前轮10方向移动时的最大位移。当辅助轮40向前超过前后轮20连线的中垂线处时,电动单车100转弯时,辅助轮40会限制电动单车100的转向,容易发生侧翻,因此通过设置该限位结构,能够避免该情况的发生。
[0064]
在本公开中,对驱动机构60的具体构成不做限制,在一种实施方式中,如图4所示,驱动机构60包括传动组件和电机,传动组件包括相互配合的齿轮61和齿条62,电机与齿轮61传动连接,齿条62固定于移动支架50上。电机的输出轴转动时,带动齿轮61转动,通过齿轮61齿条62的传动,从而带动移动支架50前后移动,进而带动整个辅助轮机构30前后移动。
[0065]
在另一种实施方式中,如图5所示,驱动机构60包括直线驱动器63,直线驱动器63与移动支架50传动连接,从而带动移动支架50前后移动。
[0066]
为了能够在前轮10悬空或后轮20悬空的情况下,保持电动单车100的平衡,控制组件还包括用于检测前轮10受力的第二传感器72和用于检测后轮20受力的第三传感器73,控制器70还分别与第二传感器72和第三传感器73信号连接,以在前轮10悬空或后轮20悬空时,控制辅助轮40朝前轮10和后轮20连线的中垂线处移动。可选地,第二传感器72和第三传感器73可为压力传感器,本公开对此不作限制。
[0067]
第二传感器72获取到前轮10的受力信息和第三传感器73获取到后轮20的受力信息,并将该受力信息转发给控制器70。若控制器70判断出前轮10或后轮20的受力过小,则向驱动机构60发出信息,将辅助轮机构30朝前后轮20连线的中垂线处移动,以保证在前轮10
或后轮20出现悬空的意外情况下的及时将辅助轮机构30前移,以保证电动单车100的平衡。
[0068]
作为一种实施方式,控制器70可以是一种集成电路芯片,具有信号处理能力,控制器70可以是通用处理器,包括中央处理器(central processing unit,cpu)、网络处理器(network processor,np)等;还可以是数字信号处理器、专用集成电路、现场可编程门阵列、可编程逻辑控制器或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。
[0069]
根据本公开的另一方面,基于同样的发明构思,本公开还提供了一种电动单车100的控制方法,用于控制上述的任一项的电动单车100,
[0070]
如图7所示的流程图所示,该方法包括:
[0071]
s210、检测电动单车100的车速;
[0072]
s220、判断所述车速是否大于等于第一车速阈值或小于等于第二车速阈值,其中,所述第一车速阈值大于所述第二车速阈值;
[0073]
s230、在车速大于等于第一车速阈值时,控制驱动机构60,使辅助轮40朝后轮20方向移动,或,在车速小于等于第二车速阈值时,控制驱动机构60,使辅助轮40朝前轮10方向移动。
[0074]
需要说明的是,如上文所述,辅助轮40朝向移动时,至多移动至前后轮20连线的中垂线处处。
[0075]
可以理解的是,若车速大于第一车速阈值时,此时辅助轮40已处于最靠近后轮20的位置,则此时辅助轮40不发生移动。同理,若车速小于第二车速阈值时,此时辅助轮40已处于前后轮20连线的中垂线处,则此时辅助轮40不发生移动。
[0076]
在上述的s220和s230中,第一车速阈值和第二车速阈值可通过具体对电动单车100的测试来确定。其中,在本公开中的一种实施方式中,车速的大小和辅助轮机构30的移动距离之间的关系大概为成正相关的关系,例如,以第一车速阈值为a,第二车速阈值为c,以a>c为例进行说明。当车速小于等于c时,辅助轮机构30向前移动,使得此时辅助轮40保持在前后轮20连线的中垂线处处;当车速大于等于a时,辅助轮机构30向后移动,使得此时辅助轮40保持在最靠近后轮20的位置处;当车速大于a小于c时,辅助轮40处于辅助轮40处于最靠近后轮20的位置与前后轮20连线的中垂线处之间的某个位置上。并且,辅助轮40与前后轮20连线的中垂线处之间的距离与辅助轮40可移动的总距离之比可以约等于当前车速和c的差值与车速a和车速c的差值之比。
[0077]
通过上述的技术方法,当检测到电动单车100的行驶速度过快,例如大于等于第一车速阈值时,控制驱动机构60使得辅助轮机构30朝后轮20方向移动,辅助轮40移动至靠近后轮20处,一方面能够增加后轮20附近与地面接触的摩擦力,增加后轮20附近的支撑点的数量,当遇到颠簸时,由于后轮20两侧的辅助轮40的限制,后轮20不容易发生左右摇摆,从而能够增加电动单车100应对颠簸的能力,保持平衡。另一方面,辅助轮40移动至靠近后轮20处,远离前轮10,使得在转向时辅助轮40需要偏转的角度减小,甚至不需要偏转,因此,辅助轮40几乎不会限制电动单车100的转向,后移的辅助轮40增加了电动单车100转向的灵活性,便于电动单车100在高速状态下转向,从而能够保持电动单车100转向时的平衡。
[0078]
当检测到电动单车100行驶速度较慢,例如小于等于第二车速阈值时,控制驱动机构60使得辅助轮机构30朝前轮10方向移动,使辅助轮40靠近前后轮20连线的中垂线处,此
时,一方面辅助轮40靠近电动单车100的重心,能够对电动单车100进行更加有效的支撑,另一方面,此时,两侧的辅助轮40与后轮20能够共同形成稳定的三角形支撑结构,两侧的辅助轮40与前轮10也能够共同形成稳定的三角形支撑结构,通过前后的稳定的三角形支撑结构从而对电动单车100形成稳定的支撑,保持电动单车100的平衡。
[0079]
为了能够对突然的颠簸等突发状况引起的车轮悬空及时进行处理,保证电动单车100的平衡,判断所述车速是否大于等于第一车速阈值或小于等于第二车速阈值之前,如图7所示,所述方法还包括:
[0080]
s215:检测电动单车100的前轮10和后轮20的受力值;
[0081]
s216:确定受力值大于受力阈值;
[0082]
方法还包括:
[0083]
s240:确定受力值小于等于受力阈值;
[0084]
s250:在受力值小于等于受力阈值时,控制电动单车100的动力电机,以使电动单车100的车速降低,并且控制驱动机构60,使辅助轮机构30朝前轮10方向移动。
[0085]
步骤s210和步骤s215可同时进行,也可先进行步骤s215和步骤s216后再进行步骤210和步骤220。
[0086]
在步骤s220之前还需要进行步骤s215和步骤s216,以保证此时电动单车100的前后轮20处于正常的行驶状态。换言之,无论电动车的行驶速度大于等于第一车速阈值或小于等于第二车速阈值,当检测到前轮10或后轮20的受力值小于等于受力阈值时,均通过控制驱动机构60,使辅助轮40朝前轮10方向移动。
[0087]
另外,电动单车100由于路况颠簸或者转向速度过快时导致前轮10翘起悬空或者后轮20翘起悬空时,此时,检测到前轮10和后轮20的受力值小于受力阈值,即可判断出此时前轮10或后轮20悬空,则控制电动单车100的动力电机,以使降低电动单车100的车速,与此同时,控制驱动机构60,使得辅助轮机构30向前后轮20连线中垂线处移动,以保证在前轮10或后轮20悬空的意外情况下,能够对电动单车100进行支撑,保证电动单车100的平衡。
[0088]
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
[0089]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
[0090]
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips