
 商标分类
商标分类  商标转让
商标转让 
一种仿生连杆机械腿及爬行机器人的制作方法
 2021-02-07 06:02:44|
2021-02-07 06:02:44| 276|
276| 起点商标网
起点商标网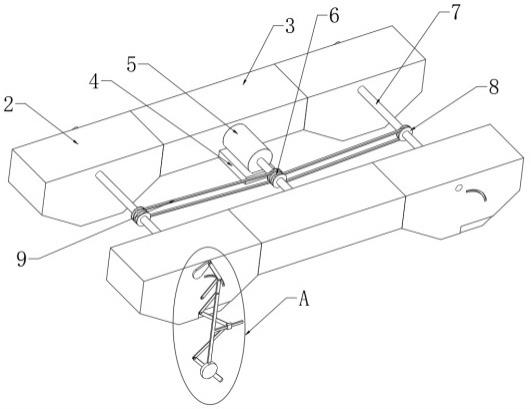
[0001]
本发明涉及机器人技术领域,具体为一种仿生连杆机械腿及爬行机器人。
背景技术:
[0002]
模仿生物的形态、结构和控制原理设计制造出的功能更集中、效率更高并具有生物特征的机械。研究仿生机械的学科称为仿生机械学,它是20世纪60年代末期由生物学、生物力学、医学、机械工程、控制论和电子技术等学科相互渗透、结合而形成的一门边缘学科。仿生机械研究的主要领域有生物力学、控制体和机器人。把生物系统中可能应用的优越结构和物理学的特性结合使用,人类就可能得到在某些性能上比自然界形成的体系更为完善的仿生机械。
[0003]
根据专利号为cn109911053b的发明专利,该仿生爬行机器人运动过程中会出现上下颠簸的情况,虽然能够实现仿生的效果,但是在一些需要水平移动的情况下就不能使用该仿生机器人,导致仿生机器人的使用范围减小,而且该仿生机器人左右两侧的机械腿在运行过程中不能保证状态互补,可能会出现机器人歪斜的情况,导致机器人运行不稳定。
[0004]
为此,我们提出一种仿生连杆机械腿及爬行机器人来解决上述问题。
技术实现要素:
[0005]
针对上述问题,本发明提供一种仿生连杆机械腿及爬行机器人,其通过动力装置、第一传动连杆和连杆等,保证爬行机器人的前后机械腿同步运动,而且使得爬行机器人的两个对角的机械腿保持一致的运动状态,相邻的两个机械腿运行状态相反,保证爬行机器人前行的平稳性,防止爬行机器人左右晃动,解决了现有仿生机器人运行不稳定的问题。
[0006]
本发明所使用的技术方案是:一种仿生连杆机械腿及爬行机器人,包括固定板、安装块和控制器,所述安装块固定设置于固定板的下方四个拐角处,且左右两侧安装块之间转动插设有两个转轴,前后两个所述安装块之间固定连接有连接块,且连接块一侧侧壁固定连接有能够带动两个转轴同步转动的动力装置,所述转轴的两端分别贯穿两侧的安装块固定连接有两个第一传动连杆,且两个第一传动连杆方向相反,所述安装块的侧壁分别转动连接有第一连杆和第二连杆,且第一连杆和第二连杆长度一致,所述第一连杆和第二连杆的另一端转动连接有竖杆,且竖杆的上端转动连接有第二传动连杆,且第二传动连杆的另一端与第一传动连杆转动连接,所述竖杆的一侧侧壁固定连接有水平设置的滑杆,且滑杆上滑动套设有滑块,所述滑块的一侧侧壁转动连接有第一拉杆,且第一拉杆的另一端与第二连杆靠近安装块的一端转动连接,所述竖杆的下端固定连接固定块,且固定块的中间位置转动连接有输出杆,且输出杆的上端转动连接有第二拉杆,且第二拉杆的另一端与滑块转动连接,且第一拉杆与第二拉杆长度一致,所述输出杆的下端滑动套设有套杆,且套杆和输出杆之间固定连接有能够拉动套杆的回弹装置,所述固定块靠近套杆的侧壁开设有限位槽,且限位槽的两端深度不一致,所述套杆靠近固定块的侧壁固定连接有套管,且套管的开口端设置有挡环,所述套管内部滑动插设有限位杆,且限位杆位于套管内部的一端设置
有挡肩,所述套管的内部设置有第一弹簧,且第一弹簧的两端分别与套杆和限位杆固定连接。
[0007]
优选地,所述动力装置包括固定在连接块侧壁的支架,且支架的上方侧壁固定连接有电机,所述电机的输出轴固定连接有第一皮带轮,且两个转轴上分别固定连接有两个第二皮带轮,且第一皮带轮与第二皮带轮之间通过皮带传动连接。
[0008]
优选地,所述回弹装置包括固定连接在输出杆侧壁上的第一固定销,且套杆的一侧侧壁固定连接有第二固定销,所述第一固定销和第二固定销之间固定连接有第二弹簧。
[0009]
优选地,所述套杆的下端开设有安装槽,且安装槽中固定嵌设有橡皮垫,所述橡皮垫的下方侧壁设置成圆弧状,且橡皮垫的圆弧状侧壁开设有多条防滑条纹。
[0010]
优选地,所述限位杆位于套管外部的一端设置有圆角。
[0011]
优选地,所述套管的外侧固定套设有轴承,且轴承的外圈直径比限位槽的直径小。
[0012]
与现有技术相比,本发明的有益效果是:(1)本发明通过动力装置、第一传动连杆和连杆等,电机带动第一皮带轮转动,通过皮带使得两个第二皮带轮同步转动,保证爬行机器人的前后机械腿同步运动,而且同一转轴两端的第一传动连杆方向相反,使得爬行机器人的左右机械腿始终保持相反的状态,结合动力装置,使得爬行机器人的两个对角的机械腿保持一致的运动状态,相邻的两个机械腿运行状态相反,保证爬行机器人前行的平稳性,防止爬行机器人左右晃动;(2)本发明通过第一连杆、第二连杆和竖杆等,第一传动连杆通过第二传动连杆带动第一连杆转动,且第二连杆与第一连杆长度一致,保证了竖杆始终处于竖直方向,在第一连杆转动过程中,第一拉杆会拉动滑块,使得滑块向左侧移动,并通过第二拉杆使得输出杆转动,且由于第一拉杆与第二拉杆长度一致,使得输出杆与第一连杆转动角度一致,此时套管位于限位槽外部,此时套杆底部到固定块中心的距离、与输出杆的上端到固定块中心的距离一致,在此过程中套杆底部的运动轨迹始终保持在水平方向,能够平稳的推动爬行机器人前进,当第一连杆转动到最大角度后,限位杆压缩第一弹簧并使得套管进入限位槽中,在回弹装置的作用下套杆收缩,同理,在第一连杆反向转动过程中输出杆复位,且在此过程中套杆底部不与地面接触,保证爬行机器人前行不会受阻,当第一连杆复位完成后,在限位槽的作用下,套杆再次与地面接触,此时限位杆在第一弹簧的作用下弹出,保证套管不会在限位槽的下方开口处进入限位槽,如此反复即可实现爬行机器人前进过程中不会上下起伏。
附图说明
[0013]
图1为本发明的整体结构示意图;图2为本发明的动力装置结构示意图;图3为图2中a处结构放大图;图4为本发明的回弹装置结构示意图;图5为本发明的限位槽结构示意图;图6为本发明的套管内部结构示意图;图7为本发明的转轴结构示意图。
[0014]
图中:1、固定板;2、安装块;3、连接块;4、支架;5、电机;6、第一皮带轮;7、转轴;8、第二皮带轮;9、皮带;10、第一传动连杆;11、第一连杆;12、第二连杆;13、竖杆;14、第二传动
连杆;15、滑杆;16、滑块;17、第一拉杆;18、固定块;19、输出杆;20、第二拉杆;21、套杆;22、第一固定销;23、第二固定销;24、第二弹簧;25、橡皮垫;26、限位槽;27、套管;28、限位杆;29、第一弹簧。
具体实施方式
[0015]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0016]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0017]
实施例,参照图1-7所示,一种仿生连杆机械腿及爬行机器人,包括固定板1和安装块2,安装块2固定设置于固定板1的下方四个拐角处,且左右两侧安装块2之间转动插设有两个转轴7,前后两个安装块2之间固定连接有连接块3,且连接块3一侧侧壁固定连接有能够带动两个转轴7同步转动的动力装置,动力装置包括固定在连接块3侧壁的支架4,且支架4的上方侧壁固定连接有电机5,电机5的输出轴固定连接有第一皮带轮6,且两个转轴7上分别固定连接有两个第二皮带轮8,且第一皮带轮6与第二皮带轮8之间通过皮带9传动连接,该设置能够保证爬行机器人的前后机械腿同步转动,保证爬行机器人行走的稳定性,转轴7的两端分别贯穿两侧的安装块2固定连接有两个第一传动连杆10,且两个第一传动连杆10方向相反,安装块2的侧壁分别转动连接有第一连杆11和第二连杆12,且第一连杆11和第二连杆12长度一致,第一连杆11和第二连杆12的另一端转动连接有竖杆13,且竖杆13的上端转动连接有第二传动连杆14,且第二传动连杆14的另一端与第一传动连杆10转动连接,竖杆13的一侧侧壁固定连接有水平设置的滑杆15,且滑杆15上滑动套设有滑块16,滑块16的一侧侧壁转动连接有第一拉杆17,且第一拉杆17的另一端与第二连杆12靠近安装块2的一端转动连接,竖杆13的下端固定连接固定块18,且固定块18的中间位置转动连接有输出杆19,且输出杆19的上端转动连接有第二拉杆20,且第二拉杆20的另一端与滑块16转动连接,且第一拉杆17与第二拉杆20长度一致,输出杆19的下端滑动套设有套杆21,套杆21的下端开设有安装槽,且安装槽中固定嵌设有橡皮垫25,橡皮垫25的下方侧壁设置成圆弧状,且橡皮垫25的圆弧状侧壁开设有多条防滑条纹,该设置使得套杆21与地面接触的更加稳定,而且能够防止地面打滑,且套杆21和输出杆19之间固定连接有能够拉动套杆21的回弹装置,回弹装置包括固定连接在输出杆19侧壁上的第一固定销22,且套杆21的一侧侧壁固定连接有第二固定销23,第一固定销22和第二固定销23之间固定连接有第二弹簧24,该设置使得套杆21在机械腿复位的过程中收缩,套杆21离开地面保证爬行机器人运行流畅,固定块18靠近套杆21的侧壁开设有限位槽26,且限位槽26的两端深度不一致,套杆21靠近固定块18的侧壁固定连接有套管27,套管27的外侧固定套设有轴承,且轴承的外圈直径比限位槽26的直径小,该设置使得套管27在限位槽26中滑动的更加流畅,防止机械腿运行过程中卡死,且套管27的开口端设置有挡环,套管27内部滑动插设有限位杆28,限位杆28位于套管27外部的一端设置有圆角,该设置使得套管27进入限位槽26中更加流畅,且限位杆28位于套管27内部的一端设置有挡肩,套管27的内部设置有第一弹簧29,且第一弹簧29的两端分别与
套杆21和限位杆28固定连接。
[0018]
本发明中,控制器可以设置在机器人的机身固定板1上,可以通过设置plc程序实现自动控制,也可以通过设置远程信号收发器,远程控制气人,电机5带动第一皮带轮6转动,通过皮带9使得两个第二皮带轮8同步转动,保证爬行机器人的前后机械腿同步运动,而且同一转轴7两端的第一传动连杆10方向相反,使得爬行机器人的左右机械腿始终保持相反的状态,结合动力装置,使得爬行机器人的两个对角的机械腿保持一致的运动状态,相邻的两个机械腿运行状态相反,保证爬行机器人前行的平稳性,防止爬行机器人左右晃动,第一传动连杆10通过第二传动连杆14带动第一连杆11转动,且第二连杆12与第一连杆11长度一致,保证了竖杆13始终处于竖直方向,在第一连杆11转动过程中,第一拉杆17会拉动滑块16,使得滑块16向左侧移动,并通过第二拉杆20使得输出杆19转动,且由于第一拉杆17与第二拉杆20长度一致,使得输出杆19与第一连杆11转动角度一致,此时套管27位于限位槽26外部,此时套杆21底部到固定块18中心的距离、与输出杆19的上端到固定块18中心的距离一致,在此过程中套杆21底部的运动轨迹始终保持在水平方向,能够平稳的推动爬行机器人前进,当第一连杆11转动到最大角度后,限位杆28压缩第一弹簧29并使得套管27进入限位槽26中,在回弹装置的作用下套杆21收缩,同理,在第一连杆11反向转动过程中输出杆19复位,且在此过程中套杆21底部不与地面接触,保证爬行机器人前行不会受阻,当第一连杆11复位完成后,在限位槽26的作用下,套杆21再次与地面接触,此时限位杆28在第一弹簧29的作用下弹出,保证套管27不会在限位槽26的下方开口处进入限位槽26,如此反复即可保证爬行机器人前进过程中不会上下起伏。
[0019]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips