
 商标分类
商标分类  商标转让
商标转让 
一种跳跃蛙型机器人的制作方法
 2021-02-07 05:02:18|
2021-02-07 05:02:18| 234|
234| 起点商标网
起点商标网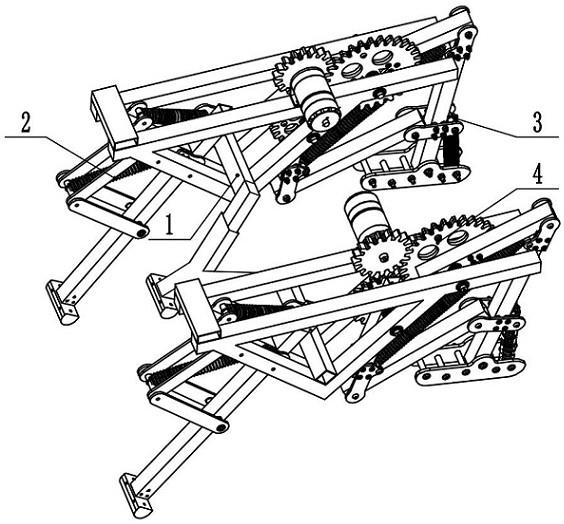
[0001]
本发明涉及移动机器人技术领域,特别涉及一种跳跃蛙型机器人。
背景技术:
[0002]
随着机器人技术的不断发展,在面对恶劣的环境和复杂的地形时,运用机器人的弹跳功能来增强其地形适应和自主运动的能力,是近年来发展较快的一种机器人技术。青蛙跳跃具有爆发性强、距离远(能达到身体长度的15倍左右)的特点,拥有这种能力的跳跃机器人将能轻松越过沟渠和障碍,并且具有很好的环境适应性,成为研究跳跃机器人的对象;例如专利号:201310553698.5的中国发明专利公开了一种五关节仿蛙跳跃机器人,由躯干机构、前肢机构和后肢机构组成,其使用伺服电机带动后腿跳跃,由于弹簧功率密度大、速度快,伺服电机转速慢、功率密度低,二者耦合并不能发挥各自优势,机械结构复杂,且弹跳效率较低;现有跳跃机器人的动力元件数量较多、机械结构与控制复杂、重量较大、跳跃高度和距离较小、且弹跳效率不高;因此我们急需发明一种单动力源驱动、结构简单、重量较轻、跳跃距离远且能够连续稳定跳跃的蛙型机器人来解决上述技术问题。
技术实现要素:
[0003]
本发明目的在于针对现有技术的不足提供一种单动力源驱动、结构简单、重量较轻、跳跃距离远且能够连续稳定跳跃的蛙型机器人。
[0004]
本发明所使用的技术方案是:一种跳跃蛙型机器人,包括:躯干、前腿缓冲机构、后腿跳跃机构和传动机构;前腿缓冲机构安装在躯干前面,后腿跳跃机构安装在躯干后面,所述传动机构安装在躯干上面,能够驱动后腿跳跃机构运动;所述躯干上设置有:横梁支撑机构、小横梁、前腿杆、轴a、轴b、轴c、轴d、电机支座和三角架;所述三角架有两组,每组两个;每组之间焊接一个小横梁,两组之间焊接一个横梁支撑机构;所述前腿杆位于两个三脚架之间,焊接在小横梁上;轴a和轴b设置在前腿杆上,轴c和轴d固定安装在三角架上;所述电机支座固定在三脚架上;所述横梁支撑机构包括:大横梁a、支撑块b和y形缓冲架c,所述y形缓冲架c底部与支撑块b固定连接,顶部与大横梁a固定连接,所述y形缓冲架c内部装有弹簧;所述前腿缓冲机构包括:小臂杆、支撑杆、缓冲拉簧、大臂杆、复位拉簧、前脚掌、轴e、轴f、轴g;所述前脚掌固定安装在大臂杆底端,所述大臂杆通过轴a与前腿杆转动连接,大臂杆顶端连接复位拉簧的一端,所述复位拉簧的另一端连接在轴b上;所述小臂杆一端通过轴g转动连接在前腿杆上;另一端通过轴f与支撑杆转动连接,支撑杆的另一端通过轴e转动安装在大臂杆上;所述缓冲拉簧一端连接在轴f上,另一端连接在轴a上;所述后腿跳跃机构包括:小腿杆、大弹簧、动力杆、连接杆、大腿杆、小弹簧、后脚掌、轴h、轴m、轴n和轴k;所述小腿杆一端通过轴d转动安装在三角架上,另一端通过轴h与大腿杆
转动连接;所述动力杆一端通过轴c转动安装在三角架上,另一端通过轴k与连接杆转动连接;连接杆的另一端通过轴m转动安装在大腿杆上;所述大弹簧一端连接在轴k上,另一端连接在轴h上;所述小弹簧一端通过轴m连接在大腿杆上,另一端连接后脚掌的后端;所述后脚掌通过轴n转动安装在大腿杆底端;所述传动机构包括:电动机、动力齿轮、大齿轮和小齿轮;所述电动机固定安装在电机支座,动力齿轮活动安装在电动机的输出轴上,动力齿轮与大齿轮啮合;所述大齿轮转动安装在轴d上,与小腿杆固定连接;大齿轮与小齿轮啮合,所述小齿轮转动安装在轴c上,与动力杆固定连接。
[0005]
优选地,所选用的大弹簧为强力拉簧。
[0006]
优选地,所选用的小弹簧为压簧。
[0007]
优选地,所选用的电动机为舵机。
[0008]
优选地,所述的前腿缓冲机构、后腿跳跃机构和传动机构包括两组,分别位于躯干的左右两侧。
[0009]
由于本发明采用了上述技术方案,本发明具有以下优点:(1)本发明采用连杆机构,机械结构简单、体积小质量轻、减少能量损耗,使机器人跳跃距离更远、更高;(2)本发明通过设置后腿跳跃机构和前腿缓冲机构,减少机器人跳跃落地时的压力,增强机器人跳跃时整体的稳定性,可适应各种复杂地形;(3)本发明通过设置y形缓冲架,可有效增强该跳跃蛙型机器人在工作过程中的环境多变适应性,当该机器人被用作承载重物工作时,支撑块保证了该机器人的机身安全和稳定性;(4)本发明通过电动机提供动能,再配合弹簧蓄能,可用较小的力量,获得瞬时的能量释放,使工作更加连续,提高了工作效率。
附图说明
[0010]
图1为本发明的整体结构示意图。
[0011]
图2为本发明躯干内部结构示意图。
[0012]
图3为本发明大横梁具体结构示意图。
[0013]
图4为本发明前腿缓冲机构具体结构示意图。
[0014]
图5为本发明后腿跳跃机构具体结构示意图。
[0015]
图6为本发明传动机构具体结构示意图。
[0016]
附图标号:1-躯干;2-前腿缓冲机构;3-后腿跳跃机构;4-传动机构;101-横梁支撑机构;101a-大横梁;101b-支撑块;101c-y形缓冲架;102-小横梁;103-前腿杆;104-轴a;105-轴b;106-轴c;107-轴d;108-电机支座;109-三角架;201-小臂杆;202-支撑杆;203-缓冲拉簧;204-大臂杆;205-复位拉簧;206-前脚掌;207-轴e;208-轴f;209-轴g;301-小腿杆;302-大弹簧;303-动力杆;304-连接杆;305-大腿杆;306-小弹簧;307-后脚掌;308-轴h;309-轴m;310-轴n;311-轴k;401-电动机;402-动力齿轮;403-大齿轮;404-小齿轮。
具体实施方式
[0017]
本发明公开了一种跳跃蛙型机器人,下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0018]
在本发明的描述中,需要说明的是,术语“上”、“下”、
ꢀ“
前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0019]
实施例,如图1-6所示,一种跳跃蛙型机器人,本发明包括:躯干1、前腿缓冲机构2、后腿跳跃机构3和传动机构4;前腿缓冲机构2安装在躯干1前面,后腿跳跃机构3安装在躯干1后面,所述传动机构4安装在躯干1上面,能够驱动后腿跳跃机构3运动;本实施例采用连杆机构,机械结构简单、体积小质量轻、减少能量损耗,跳跃距离更远、更高;本实施例中前腿缓冲机构2、后腿跳跃机构3和传动机构4包括两组,分别位于躯干1的左右两侧;参见图2,躯干1上设置有:横梁支撑机构101、小横梁102、前腿杆103、轴a104、轴b105、轴c106、轴d107、电机支座108和三角架109;三角架109有两组,每组两个;每组之间焊接一个小横梁102,两组之间焊接一个横梁支撑机构101;前腿杆103位于两个三角架109之间,焊接在小横梁102上;轴a104和轴b105设置在前腿杆103上,轴c106和轴d107固定安装在三角架109上;电机支座108固定在三脚架109上;此外,请参见图3,横梁支撑机构101包括:大横梁101a、支撑块101b和y形缓冲架101c,所述y形缓冲架101c底部与支撑块101b固定连接,顶部与大横梁101a固定连接,y形缓冲架101c内部装有弹簧;y形缓冲架101c的设置,可有效增强该跳跃蛙型机器人在工作过程中的环境多变适应性,且当该机器人被用作承载重物工作时,支撑块101b的设置保证了该机器人的机身安全和稳定性。
[0020]
请参见图4,前腿缓冲机构2包括:小臂杆201、支撑杆202、缓冲拉簧203、大臂杆204、复位拉簧205、前脚掌206、轴e207、轴f208、轴g209;前脚掌206固定安装在大臂杆204底端,大臂杆204通过轴a104与前腿杆103转动连接,大臂杆204顶端连接复位拉簧205的一端,复位拉簧205的另一端连接在轴b105上;小臂杆201一端通过轴g209转动连接在前腿杆103上;另一端通过轴f208与支撑杆202转动连接,支撑杆202的另一端通过轴e207转动安装在大臂杆204上;缓冲拉簧203一端连接在轴f208上,另一端连接在轴a104上;当机器人起跳时,前腿缓冲机构2对机器人做支撑用;当机器人跳跃后落地时,前脚掌206最先接触地面,冲击力会使大臂杆204绕着轴a104转动,并将复位拉簧205拉长,与此同时,大臂杆204作用力在支撑杆202上,减少支撑杆202和小臂杆201之间的夹角,使缓冲拉簧203被拉长;将落地时地面对机器人的冲击力转移到弹簧内,弹簧储能会减少冲击力对机器人的破坏力,使机器人在落地时得以相对稳定的着陆,实现前腿缓冲机构2的缓冲作用;弹簧内存储的能量瞬时释放会反作用力前腿缓冲机构2使其恢复初始状态,为下一次起跳做准备;前腿缓冲机构2增强了机器人跳跃时整体的稳定性,可适应各种复杂地形。
[0021]
请参见图5,后腿跳跃机构3包括:小腿杆301、大弹簧302、动力杆303、连接杆304、
大腿杆305、小弹簧306、后脚掌307、轴h308、轴m309、轴n310和轴k311;小腿杆301一端通过轴d107转动安装在三角架109上,另一端通过轴h308与大腿杆305转动连接;动力杆303一端通过轴c106转动安装在三角架109上,另一端通过轴k311与连接杆304转动连接;连接杆304的另一端通过轴m309转动安装在大腿杆305上;大弹簧302一端连接在轴k311上,另一端连接在轴h308上;小弹簧306一端通过轴m309连接在大腿杆305上,另一端连接后脚掌307的后端;后脚掌307通过轴n310转动安装在大腿杆305底端;使用时,大弹簧302为强力拉簧,小弹簧306为强力压簧;这两种弹簧质量轻,且可控性很强,能够在瞬间提供较大的爆发力,在任意时刻对其进行压缩,增加了动力机构的可控性;请参见图5-6,传动机构4包括:电动机401、动力齿轮402、大齿轮403和小齿轮404;电动机401固定安装在电机支座108,动力齿轮402活动安装在电动机401的输出轴上,动力齿轮402与大齿轮403啮合;大齿轮403转动安装在轴d107上,与小腿杆301固定连接;大齿轮403与小齿轮404啮合,小齿轮404转动安装在轴c106上,与动力杆303固定连接;使用时,接通电源,启动电动机401,动力齿轮402转动,驱动大齿轮403和小齿轮404转动;大齿轮403转动时带动小腿杆301绕着轴d107转动,小齿轮404转动时带动动力杆303绕着轴c106转动;小腿杆301和动力杆303同时向相反方向转动,使大弹簧302处于拉伸状态,将电动机401的动能转化到弹性件中储能;存储在大弹簧302内的能量瞬时释放,将机器人弹起并在空中使后腿跳跃机构3恢复初始状态;当机器人跳跃后落地时,后脚掌307接触地面,地面带来的冲击力传递给后脚掌307,小弹簧306被压缩储能,减少冲击力对机器人的破坏力,使机器人在落地时得以相对稳定的着陆,起到缓冲作用;存储的能量瞬时释放还为下一次跳跃提供动力,减少能力损失,使工作更加连续,提高了工作效率。
[0022]
本发明实施例的一个可选实施方式中,如图5所示,除与上一个实施例相同的零件外,所选用的电动机401为舵机。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 机器人

 热门咨询
热门咨询




tips