
 商标分类
商标分类  商标转让
商标转让 
一种变形轮装置、轮履腿行走装置及轮履腿机器人的制作方法
 2021-02-07 03:02:36|
2021-02-07 03:02:36| 269|
269| 起点商标网
起点商标网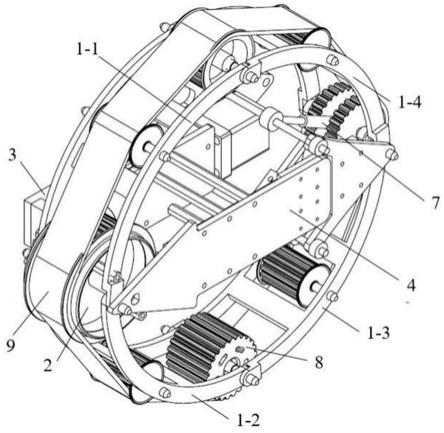
[0001]
本实用新型涉及机器人技术领域,尤其涉及一种变形轮装置、轮履腿行走装置及轮履腿机器人。
背景技术:
[0002]
目前,现有的移动机器人按运动机理和构形形式可分为三种移动机器人,即:轮式机器人、履式机器人和腿式机器人。其中轮式机器人具有结构简单、运行平稳、控制便利的特点,在速度和能耗方面的表现也是现有移动机器人中最好的,但是其不适合复杂多变的环境,越障能力差、通过率低。腿式机器人有着运动灵活,适应性好的特点,但是其机械结构复杂,步态控制困难,速度和能耗方面的表现都不尽如人意。履带式机器人有着较好的越障能力和适应复杂地形的能力,但是存在能耗高、速度及效率较低的缺点。
技术实现要素:
[0003]
为了至少解决上述技术问题之一,本实用新型的目的在于提供一种结构简单、运动灵活、稳定可靠的变形轮装置,还提供一种轮履腿行走装置及轮履腿机器人,将轮式、履式、腿式三种运动模式的优势集于一身,实现速度快、越障能力强、能耗低的目的。
[0004]
为了至少实现上述目的之一,本实用新型提供的实施例中采用的技术方案为:提供一种变形轮装置,包括支撑架组件和变形机构组件,所述变形机构组件包括变形动力模块,其设置在所述支撑架组件的一侧;所述变形动力模块包括第一固定板、第一致动器、螺旋传动装置和第一滑动板;所述第一固定板与所述支撑架组件连接;所述第一致动器设置在所述第一固定板上,并通过所述螺旋传动装置致使所述第一滑动板移动;所述第一滑动板与所述支撑架组件连接。
[0005]
进一步地,还包括电机安装板,所述第一致动器为电机,所述电机安装在所述电机安装板,所述电机安装板与所述第一固定板固连;所述螺旋传动装置包括丝杆和螺母滑块;所述丝杆与所述电机的输出轴固连;所述螺母滑块与所述第一固定板固连。
[0006]
进一步地,所述变形机构组件还包括变形从动模块,所述变形从动模块设置在所述支撑架组件的另一侧;所述变形从动模块包括第二固定板、滑轨、滑块和第二滑动板;所述第二固定板与所述支撑架组件连接;所述滑轨固定设置在所述第二固定板上,所述滑轨上设置有所述滑块,所述第二滑动板固连在所述滑块上;所述第二滑动板与所述支撑架组件连接。
[0007]
进一步地,所述支撑架组件包括支撑架,多个所述支撑架依次首尾铰接组成圆形;所述支撑架包括两个弧形板,两个弧形板之间通过筋条连接。
[0008]
进一步地,所述支撑架包括第一支撑架、第二支撑架、第三支撑架和第四支撑架;所述第一支撑架与第四支撑架之间、所述第二支撑架与第三支撑架之间的连接处通过连接轴铰接;分别形成第一铰接处和第三铰接处;在所述第一支撑架和第二支撑架之间通过短轴一铰接,形成第二铰接处;在所述第三支撑架和第四支撑架之间通过短轴二铰接,形成第
四铰接处;所述第一滑动板和第二滑动板与所述支撑架组件在所述第二铰接处连接;所述第一固定板和第二固定板与所述支撑架组件在所述第四铰接处连接。
[0009]
进一步地,还包括驱动装置,所述驱动装置包括电机轴、电机转子、主动同步带轮和霍尔电机,所述电机轴的两端分别固定支撑在所述第一滑动板和第二滑动板上,所述电机轴外侧依次同轴设置有所述霍尔电机、电机转子和同步带轮;所述电机转子与所述主动同步带轮固连。
[0010]
进一步地,所述支撑架组件上还设置有从动轮组件和同步带,所述从动轮组件包括多个从动轮,多个所述从动轮间隔设置在支撑架组件上;所述同步带包裹在所述主动同步带轮和所述从动轮的外侧,并啮合传动。
[0011]
进一步地,所述支撑架组件上还设置有轮内悬挂装置,所述轮内悬挂装置包括悬挂支撑件、弹性装置、轮架和悬挂轮,所述悬挂支撑件设置在所述第一固定板和第二固定板之间;所述弹性装置的一端与所述悬挂轮的支撑轴铰接,另一端与所述悬挂支撑件连接;所述轮架一端与所述支撑轴连接,另一端与所述悬挂支撑件连接;所述悬挂轮旋转支撑在所述支撑轴上,并与所述同步带啮合传动。
[0012]
本实用新型还提供一种轮履腿行走装置,包括上述的变形轮装置,还包括腿驱动部件,所述腿驱动部件包括腿连接件和腿致动器;所述腿连接件的一端安装在所述变形轮装置上,另一端安装在所述腿致动器的输出端。
[0013]
本实用新型还提供一种轮履腿机器人,包括上述轮履腿行走装置,所述轮履腿机器人包括底盘,所述腿致动器固定安装在所述底盘上。
[0014]
本实用新型提供的变形轮装置与现有技术相比,有益效果在于:
[0015]
本实用新型的变形轮装置结构简单紧凑、可靠性高、运行平稳、噪音小;通过丝杆传动及微型导轨进行导向,可在轮式运动模式和履带式运动模式之间进行快速切换,体积更小、结构简单、驱动力大、经久耐用;由于丝杆传动具有一定的自锁能力,变形轮装置在进行变形切换后状态更稳定,变形后所得机构的构形保持性好。
[0016]
本实用新型提供的轮履腿行走装置及轮履腿机器人,融合了轮式、履式及腿式机器人的特点,将轮式、履带式、腿式三种运动模式的优势集于一身,载荷能力强、运动速度快、越障水平高、灵活度好、转弯半径小。
[0017]
总之,本实用新型提出了一种结构简单、可靠性高、成本低的变形轮装置、轮履腿行走装置及轮履腿机器人,其在机器人领域中具有广泛的应用前景。
附图说明
[0018]
图1是本实用新型提供的变形轮装置为轮状时的结构示意图;
[0019]
图2是本实用新型提供的支撑架组件的结构示意图;
[0020]
图3是图2中a处的局部放大图;
[0021]
图4是本实用新型提供的支撑架组件另一个视角的结构示意图;
[0022]
图5是本实用新型提供的驱动装置的结构示意图;
[0023]
图6是本实用新型提供的变形轮装置的部分结构示意图;
[0024]
图7是本实用新型提供的变形动力模块的结构示意图;
[0025]
图8是本实用新型提供的变形从动模块的结构示意图;
[0026]
图9是本实用新型提供的变形机构组件的结构示意图;
[0027]
图10是本实用新型提供的轮内悬挂装置的结构示意图;
[0028]
图11是本实用新型提供的变形轮装置从轮状变形为履带状的示意图;
[0029]
图12是本实用新型提供的变形轮装置为履带状的结构示意图;
[0030]
图13是本实用新型提供的变形轮装置安装腿驱动组件的结构示意图;
[0031]
图14是本实用新型提供的腿驱动组件的结构示意图;
[0032]
图15是本实用新型提供的轮履腿机器人为轮状的结构示意图;
[0033]
图16是本实用新型提供的轮履腿机器人从轮状变形为履带状的结构示意图;
[0034]
图17是本实用新型提供的轮履腿机器人为履带状的结构示意图;
[0035]
图18是本实用新型提供的轮履腿机器人通过腿跨越障碍的结构示意图。
[0036]
其中,附图标记说明如下:
[0037]
1-1第一支撑架,1-2第二支撑架,1-3第三支撑架,1-4第四支撑架,1-11筋条,1-12铰接槽,1-5连接轴,2驱动装置,2-1电机轴,2-2电机转子,2-3主动同步带轮,2-4挡边, 2-5霍尔电机,2-6电机线,3变形动力模块,3-1第一固定板,3-2电机安装板,3-3电机, 3-4螺母滑块,3-5第一滑动板,4变形从动模块,4-1第二固定板,4-2滑轨,4-3滑块,4-4 第二滑动板,5连接件,6悬挂支撑件,7轮内悬挂装置,7-1减震筒,7-2导杆,7-3轮架, 7-4悬挂轮,8从动轮组件,9同步带,10-1腿连接件,10-2腿致动器,11底盘。
具体实施方式
[0038]
为了使本领域技术人员更好地理解本实用新型的技术方案,下面结合具体实施例对本实用新型作进一步的详细说明。请注意,下面描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。实施例中未注明具体技术或条件的,按照本领域内的文献所描述的技术或条件或者按照产品说明书进行。
[0039]
在本实用新型的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0040]
在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
[0041]
以下,将通过具体实施例对本实用新型的变形轮装置作详细说明:
[0042]
如图1-12所示,本实用新型所述的变形轮装置,包括支撑架组件,驱动装置2,变形机构组件,连接件5,悬挂支撑件6,轮内悬挂装置7,从动轮组件8和同步带9等零部件。
[0043]
所述支撑架组件作为变形轮装置的支撑骨架,包括多个支撑架,多个支撑架可依次首尾铰接组成圆形。支撑架的数量可根据实际工况进行合理设置,本实施例优选为4个。如图2 所示支撑架组件包括第一支撑架1-1,第二支撑架1-2,第三支撑架1-3和第四支撑架1-4。上述每个支撑架均包括两个弧形板,两个弧形板之间通过筋条1-11连接。
[0044]
如图2-3所示,第一支撑架1-1与第四支撑架1-4之间、第二支撑架1-2与第三支撑架 1-3之间的连接处通过连接轴1-5可相互转动的铰接连接,分别形成第一铰接处和第三铰接处。在第一支撑架1-1和第二支撑架1-2的弧形板的一端设置有铰接槽1-12,在第三支撑架1-3和第四支撑架1-4的弧形板的一端设置有与所述铰接槽1-12相适配的弧形凸起,弧形凸起和铰接槽1-12相互配合可实现较大的转动范围。在所述第一支撑架1-1和第二支撑架1-2 的弧形板的另一端之间通过第二支撑架上的短轴一铰接连接,形成第二铰接处;在所述第三支撑架1-3和第四支撑架1-4的弧形板的另一端之间通过第三支撑架上的短轴二铰接连接,形成第四铰接处。如图4所示,当支撑架组件在第二铰接处和第四铰接处向外拉伸时,可使支撑架组件转动变形。
[0045]
如图6所示,在所述支撑架组件中部设置有所述变形机构组件。所述变形机构组件包括变形动力模块3和变形从动模块4,并分别设置在所述支撑架组件的中部两侧。
[0046]
所述变形动力模块3包括第一固定板3-1,电机安装板3-2,电机3-3,螺母滑块3-4和第一滑动板3-5等零部件。所述电机安装板3-2安装在所述第一固定板3-1上,所述电机3
-ꢀ
3固定设置在所述电机安装板3-2的一端,电机3-3的输出轴为丝杆3-31,所述丝杆3-31上设置有所述螺母滑块3-4。电机3-3致动丝杆3-31转动时,可带动所述螺母滑块3-4前后移动。由于所述第一滑动板3-5与所述螺母滑块3-4固连设置,第一滑动板3-5在螺母滑块3
-ꢀ
4的带动下可进行移动。
[0047]
所述变形从动模块4包括第二固定板4-1,滑轨4-2,滑块4-3和第二滑动板4-4等零部件。所述滑轨4-2固定设置在所述第二固定板4-1上,所述滑轨4-2上设置有滑块4-3,所述滑块4-3可在所述滑轨4-2上自由滑动。所述第二滑动板4-4固连在所述滑块4-3上,可通过滑块4-3在所述滑轨4-2上移动。
[0048]
变形动力模块3和变形从动模块4的同侧一端设置在支撑架组件的第二铰接处,另一端设置在支撑架组件的第四铰接处。所述第一滑动板3-5和第二滑动板4-4之间通过连接件5 固连在一起,第一固定板3-1和第二固定板4-1之间通过悬挂支撑件6固连在一起。变形动力模块3和变形从动模块4分别位于支撑架组件的两侧。当所述变形动力模块3中电机转动时,带动第一滑动板3-5和第二滑动板4-4向远离或靠近所述第一固定板3-1和第二固定板 4-1的方向移动,从而使所述变形轮装置在所述轮状和履带状之间切换,如图11所示。
[0049]
在所述第一滑动板3-5和第二滑动板4-4之间还设置有驱动装置2。所述驱动装置2包括电机轴2-1,电机转子2-2,主动同步带轮2-3,挡边2-4,霍尔电机2-5和电机线2-6等零部件。所述电机轴2-1的两端分别固定支撑在所述第一滑动板3-5和第二滑动板4-4上,电机轴2-1外侧依次同轴支撑有所述霍尔电机2-5,电机转子2-2和同步带轮2-3。所述电机转子2-2与所述同步带轮2-3固连或一体设置,由所述霍尔电机2-5致动旋转;所述霍尔电机 2-5设置有电机线2-6,电机线与控制器连接,提供动力和控制命令。所述挡边2-4设置在主动同步带轮两侧。
[0050]
在支撑架组件上设置有从动轮组件8,所述从动轮组件8包括多个从动轮,多个从动轮间隔设置在支撑架组件上。所述从动轮优选为同步带轮,并空套设置于固定在支撑架组件上的从动轴上;所述从动轮根据实际工况可进行减重处理,以降低重量。所述驱动装置2中的主动同步带轮2-3与从动轮均与同步带9啮合传动,同步带9包裹在主动同步带轮2-3与从动轮的外侧。霍尔电机2-5带动主动同步带轮2-3转动,进而带动同步带9转动,当变形
轮装置与地面接触时,可实现变形轮装置的移动。
[0051]
在支撑架组件上还设置有轮内悬挂装置7,所述轮内悬挂装置7通过两个悬挂支撑件6 固定在所述第一固定板3-1和第二固定板4-1之间。所述轮内悬挂装置7包括减震筒7-1,导杆7-2,轮架7-3和悬挂轮7-4等零部件。所述减震筒7-1,导杆7-2组成弹性装置,可提供弹性力。所述减震筒7-1一端与悬挂轮7-4的支撑轴铰接,另一端安装有所述导杆7-2。所述导杆7-2的一端固定在一个悬挂支撑件上。轮架7-3为叉状,叉状开口部的一端固连在所述支撑轴上,另一端固定在另一个悬挂支撑件上,悬挂轮7-4空套支撑在支撑轴上。支撑轴与两个悬挂支撑件6组成三角状,通过减震筒7-1和轮架7-3支撑悬挂轮7-4与所述同步带 9啮合,并向外支撑,增大了同步带的张紧力,防止内部传动打滑。
[0052]
本实用新型提供的变形轮装置在进行状态切变时,切变过程中所需皮带长度不恒定;由于减震筒7-1可以提供一定的弹性力,可以使悬挂轮7-4进行摆动,从而使皮带在切变过程中和切变后一直保持张紧状态。
[0053]
本实用新型提供的变形轮装置结构简单紧凑,可靠性高,运行平稳、噪音小;通过丝杆传动及微型导轨进行导向,可在轮式运动模式和履带式运动模式之间进行快速切换,体积更小,结构简单,驱动力大,经久耐用;由于丝杆传动具有一定的自锁能力,变形轮装置在进行变形切换后状态更稳定,变形保持性更好。
[0054]
本实用新型还提供一种轮履腿机器人,所述轮履腿机器人包括多个轮履腿行走装置,所述轮履腿行走装置包括上述变形轮装置和腿驱动部件,所述变形轮装置通过腿驱动部件安装在机器人底盘11上。如图13-16所示,腿驱动部件包括腿连接件10-1和腿致动器10-2。所述腿连接件10-1的一端安装在所述第二滑动板4-4上,另一端安装在所述腿致动器10-2的输出端;所述腿致动器10固定安装在所述底盘11的横梁上。所述腿致动器10-2可通过腿连接件10-1驱动所述变形轮装置进行摆动,做出类似抬腿的动作。所述腿致动器10-2可选用本领域常见的致动器,优选为大扭矩舵机。
[0055]
本实用新型提供的轮履腿行走装置,变形轮装置在切换为履带模式时,变形轮装置的前后分别与地面形成20度倾角。腿致动器10-2可提供最大
±
20度的摆动幅度,腿驱动部件前后摆动的设计,在轮高和前后倾角不变的情况下,提高了越障能力。例如当一定尺寸的轮履腿行走装置,当只有轮式和履式两种运动模式时,最大可跨越50mm高障碍物;加入腿驱动部件后,可跨越96mm高的障碍物。
[0056]
本实用新型提供的轮履腿机器人,轮履腿行走装置的数量可根据实际需要进行合理选择,如四个、六个等,即四足轮履腿机器人、六足轮履腿机器人。
[0057]
如图16所示,本实用新型提供的轮履腿机器人可在轮式行进模式、履带行进模式及腿部运动模式之间进行切换。轮履腿机器人在轮式行进模式时,触地面积小,行进速度快,更灵活,轮履腿行走装置与地面近似线接触,摩擦力矩较小,相同电池时的续航能力更高。轮履腿机器人在履带式行进模式时,机器人重心低不易翻倒,触地面积大,越障能力强,牵引力大,深翻负重作业优势明显。轮履腿机器人在腿部运动模式时,可进行台阶,石块等离散物体的跨越,进一步增强了机器人的越障能力。
[0058]
本实用新型提供的轮履腿行走装置及轮履腿机器人,融合了轮式、履式及腿式机器人的特点,将轮式、履带式、腿式三种运动模式的优势集于一身,载荷能力强、运动速度快、越障能力强、灵活度高、转弯半径小。
[0059]
总之,本实用新型提出了一种结构简单、可靠性高、成本低的变形轮装置、轮履腿行走装置及轮履腿机器人,其在机器人领域中具有广泛的应用前景。
[0060]
在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0061]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组件合。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips