
 商标分类
商标分类  商标转让
商标转让 
骑乘式车辆的制作方法
 2021-02-06 23:02:20|
2021-02-06 23:02:20| 359|
359| 起点商标网
起点商标网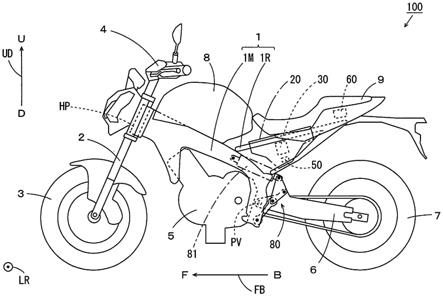
[0001]
本发明涉及一种包括惯性测量单元的骑乘式车辆。
背景技术:
[0002]
在摩托车中可以设置abs(防抱死制动系统)。例如使用imu(惯性测量单元)来控制abs。在下面的描述中,imu合适地称为惯性传感器。
[0003]
惯性传感器包括加速度传感器并且检测在彼此正交的三个轴线的方向上施加在设置有惯性传感器的车辆上的加速度。此外,惯性传感器包括陀螺仪传感器并且检测围绕上述三个轴线中的每一者产生的关于设置有惯性传感器的车辆的角速度。abs基于通过惯性传感器所检测的多个加速度和多个角速度中的至少一部分来控制。因此,施加在前轮或后轮上的制动力根据车辆的行驶状态得到调节。
[0004]
在摩托车中设置有惯性传感器的情况下,产生于发动机的振动可能取决于惯性传感器的附接状态而传递至惯性传感器。此外,由前轮或后轮的竖直运动所引起的振动可能取决于摩托车所行驶的路面的状态而传递至惯性传感器。振动减小了惯性传感器的加速度和角速度检测精度。
[0005]
如此,已经提出了用于减小传递至摩托车中的惯性传感器的各种类型的振动的配置。例如,在jp 2017-13731 a中所描述的惯性传感器的附接结构中,浮动支架经由振动吸收构件固定至车身框架。在这种状态下,惯性传感器附接至浮动支架的第一附接表面,而abs单元附接至浮动支架的第二附接表面。
[0006]
然而,即使在应用jp 2017-13731 a中所描述的结构的情况下,仍然可能减小惯性传感器对加速度和角速度的检测精度。具体而言,在jp2017-13731a所描述的摩托车中设置有惯性传感器,但其暴露于摩托车的外部。因此,在车辆行驶期间,雨水和灰尘可能附着于惯性传感器。雨水和灰尘附着于惯性传感器可能减小惯性传感器对惯性的检测精度。
[0007]
此外,在惯性传感器位于使得容易从摩托车的外部接近惯性传感器的位置的情况下,惯性传感器的位置或定向可能被摩托车的用户错误地改变。通过jp 2017-13731 a中描述的结构,惯性传感器在暴露的同时附接至板形的浮动支架并且固定至车身框架。因此,在jp 2017-13731 a所描述的摩托车中,可以说能够相对容易地从摩托车的外部接近惯性传感器。惯性传感器在摩托车中的位置和定向限定为遵循预先设计的条件。因此,在摩托车从工厂发货之后设置在摩托车中的惯性传感器的位置和定向改变的情况下,不对待检测的加速度和角速度进行检测。
[0008]
此外,通常期望使摩托车小型化。因此,摩托车中基本上不设置浪费空间。因此,在将诸如惯性传感器的电子器件添加到摩托车的情况下,有必要保证用于安装附加电子器件的新安装空间。在这种情况下,摩托车的尺寸增加。
技术实现要素:
[0009]
本发明的目的在于提供一种骑乘式车辆,其能够在维持惯性测量单元对惯性的检
测精度的同时,抑制因设置惯性测量单元而引起的车辆大型化。根据本发明,所述目的通过具有独立权利要求1的特征的骑乘式车辆来解决。在从属权利要求中限定了优选实施例。
[0010]
通常,摩托车设置有储存电池的电池箱。这样,关于上述问题,可以认为在惯性测量单元与电池一起布置在电池箱中的情况下,可以防止惯性测量单元暴露于外部并且增加从摩托车外部接近惯性测量单元的难度。然而,如果为了将惯性测量单元布置在电池箱中而增大电池箱的尺寸,则座椅的高度会由于电池箱的尺寸的增大而增大。
[0011]
此外,电池箱固定至车身框架。惯性测量单元在重量上小于电池和用于abs的液压单元等。因此,在固定至电池箱的情况下,惯性测量单元可能由于从发动机、前轮或后轮通过车身框架传递的振动而与电池箱的附接部分一起振动。
[0012]
如上所述,关于用于将惯性测量单元与电池一起布置在电池箱中的构造,可能遇到座椅高度增加和惯性测量单元振动的新问题。
[0013]
关于这些点,可以注意到,由于反复检查的结果,在车辆前后方向上、在后悬架与后轮之间以及在其附近区域存在无效空间。因此,可以发现,如果可以有效地利用该无效空间作为用于安装惯性测量单元的空间,则可以在不增加座椅高度的情况下将惯性测量单元布置在电池箱中。
[0014]
此外,可以注意到,由于电池的重量,振动不可能从外部传递至电池箱的固定电池的部分及其附近。这样,可以发现,如果惯性测量单元固定在电池箱中固定电池的部分附近,则产生于惯性测量单元中的振动可以因电池的重量而减小。
[0015]
(1)根据本教导,根据一个方面的骑乘式车辆包括:车身框架;座椅,其布置在车身框架上方,并且支撑在车身框架处;电池;惯性测量单元;树脂电池箱,其储存电池和惯性测量单元,并且固定至车身框架以位于座椅下方;后臂,其设置为从车身框架向后延伸;驱动轮,其由后臂可转动地支撑;和后悬架,其设置在比驱动轮更靠前的位置处,以从车辆前方的位置向下倾斜地延伸到车辆后方的位置,并且将后臂支撑在车身框架处使得能够在车辆上下方向上摆动,其中,电池箱具有底部部分,该底部部分在车辆前后方向上朝向后悬架与驱动轮之间的位置突出,使得当后悬架由于吸收冲击而最大程度地收缩时,在车辆的侧视图中,底部部分不与后悬架及驱动轮重叠,惯性测量单元固定至电池箱的底部部分,并且电池在惯性测量单元上方的位置处固定至电池箱,以在车辆的俯视图中与惯性测量单元的至少一部分重叠。
[0016]
在骑乘式车辆中,电池箱在座椅下方固定至车身框架。电池和惯性测量单元储存在电池箱中。电池箱的底部部分在车辆前后方向上朝向后悬架与驱动轮之间的位置突出。通过这样的构造,尽管电池箱由树脂形成,但其具有高刚度。
[0017]
惯性测量单元固定至电池箱的底部部分,由此有效地利用了后悬架的运动范围和驱动轮的运动范围的外部的无效空间作为用于安装惯性测量单元的空间。因此,可以在不增加座椅高度的情况下将惯性测量单元布置在电池箱中。
[0018]
此外,通过上述构造,电池在惯性测量单元上方的位置处固定至电池箱,从而在车辆的俯视图中与惯性测量单元的至少一部分重叠。在这种情况下,电池所附接的部分紧密接近惯性测量单元在电池箱中所附接的另一部分。因此,即使在车辆行驶期间振动从车身框架传递至电池箱的情况下,在电池箱中惯性测量单元所附接的部分的振动也由于电池的重量而受到抑制。此外,因为由树脂制成,所以上述电池箱吸收从车身框架传递的振动的一
部分。因此,减少了产生于惯性测量单元中的振动。
[0019]
此外,通过上述配置,电池和座椅存在于惯性测量单元的上方。这增加了从骑乘式车辆外部接近惯性测量单元的难度。此外,因为惯性测量单元设置在电池箱内部,所以防止了在车辆行驶期间散落在骑乘式车辆外部的雨水或灰尘附着到惯性测量单元。
[0020]
因此,可以抑制因设置惯性测量单元而导致的车辆尺寸的增大,同时保持了惯性测量单元对惯性的高检测精度。
[0021]
(2)电池可以固定为在车辆的俯视图中与整个惯性测量单元重叠。因此,进一步增加了从骑乘式车辆外部接近惯性测量装置的难度。
[0022]
(3)电池与惯性测量单元之间的距离可以小于电池在车辆上下方向上的厚度的一半。
[0023]
在这种情况下,电池所附接的部分变得更接近惯性测量单元在电池箱中所附接的另一部分。因此,由于电池的重量,进一步抑制了惯性测量单元在电池箱中所附接的另一部分的振动。
[0024]
此外,不必确保电池和惯性测量单元在车辆上下方向上的大安装空间。这可以抑制电池箱在车辆上下方向上的尺寸的增大,由此可以抑制座椅高度的增大。
[0025]
(4)骑乘式车辆还可以包括液压单元,该液压单元储存在电池箱中并且固定至电池箱以与电池相邻。
[0026]
在这种情况下,液压单元固定至电池箱以与电池相邻。因此,产生于电池箱中的惯性测量单元附近的振动因电池和液压单元的重量而减小。此外,因为液压单元储存在电池箱中,所以抑制了由于在电池箱外部设置液压单元而引起的座椅高度的增加。
[0027]
(5)惯性测量单元可以经由第一冲击缓冲构件固定至电池箱的底部部分。
[0028]
在这种情况下,抑制了由于车辆行驶而产生于电池箱中的振动传递至惯性测量单元。因此,能够以高精度测量车辆的惯性。
[0029]
(6)电池箱可以经由第二冲击缓冲构件固定至车身框架。
[0030]
在这种情况下,抑制了由于车辆行驶而产生于车身框架中的振动传递至电池箱。因此,能够以更高的精度测量车辆的惯性。
[0031]
(7)惯性测量单元可以布置为在车辆的俯视图中与在车辆前后方向上延伸的车辆中心轴线重叠。因此,可以更精确地测量车辆的惯性。
[0032]
(8)惯性测量单元可以固定在蓄电池箱中,使得当车辆竖直直立时相对于水平面倾斜不大于15
°
。因此,可以更精确地测量车辆的惯性。
[0033]
(9)骑乘式车辆还可以包括金属制的固定机构,该固定机构附接至电池箱,并且配置为能够将电池固定至电池箱并且能够从电池箱拆卸电池。
[0034]
在这种情况下,相较于电池通过诸如橡胶制的弹性构件固定至电池箱的情况,电池牢固地固定至电池箱。因此,抑制了在车辆行驶期间由于电池相对于电池箱的移动而在电池箱的底部部分中产生振动。因此,可以更精确地测量车辆的惯性。
[0035]
(10)电池可以具有彼此相邻的第一表面和第二表面,固定机构可以包括具有第一端和第二端的第一固定构件以及具有第三端和第四端的第二固定构件,第一固定构件的第二端可以通过铰链连接至第二固定构件的第三端,第一固定构件的第一端可以附接至电池箱,使得第一固定构件沿着电池的第一表面延伸,第二固定构件可以设置为能够通过使用
铰链相对于第一固定构件转动而接近和远离电池的第二表面,并且第二固定构件的第四端可以配置为能够固定至电池箱并且能够从电池箱拆卸,其中,第二固定构件紧密接近电池的第二表面。
[0036]
在这种情况下,可以通过第一固定构件和第二固定构件容易且牢固地将电池固定至电池箱。此外,可以容易地移除固定至电池箱的电池。
[0037]
(11)骑乘式车辆还可以包括执行关于车辆的操作的操作元件以及基于惯性测量单元对车辆的惯性测量结果来控制操作元件的控制器。因此,根据车辆的状态来适当地控制与车辆相关的操作。
[0038]
从以下参考附图对本教导的优选实施例的描述中,本教导的其他特点、元件、特征和优点将变得更加明显。
附图说明
[0039]
图1是根据本教导的一个实施例的摩托车的侧视图;
[0040]
图2是用于说明惯性传感器在摩托车中的附接状态的示意性立体图;
[0041]
图3是图2的电池箱的俯视图;
[0042]
图4是示出图2的电池箱中储存的各种构成元件之间的位置关系的俯视图;
[0043]
图5是用于说明减振机构与后轮以及电池箱之间的位置关系的、车辆的后半部分的示意性透视侧视图;
[0044]
图6是用于说明减振机构与后轮以及电池箱之间的位置关系的、车辆的后半部分的示意性透视侧视图;
[0045]
图7是用于说明电池和惯性传感器固定在电池箱中的状态的细节的示意性透视侧视图;
[0046]
图8是用于说明电池和惯性传感器固定在电池箱中的状态的细节的示意性透视立体图;和
[0047]
图9是用于说明电池箱固定至后框架的状态的细节的立体图和部分横截面图。
具体实施方式
[0048]
下面将参照附图描述根据本教导的一个实施例的骑乘式车辆。摩托车将被描述为骑乘式车辆的一个示例。
[0049]
[1]摩托车的示意性构造
[0050]
图1是根据本教导的一个实施例的摩托车的侧视图。图1示出了垂直于路面直立的摩托车100。在图1和随后给出的视图中的每一者中,摩托车100的前后方向fb、左右方向lr和上下方向ud由箭头指示。箭头在前后方向fb上所指向的方向称为向前,而其相反方向称为向后。此外,箭头在左右方向lr上指向的方向称为向左,而其相反方向称为向右。此外,箭头在上下方向ud上指向的方向称为向上,而其相反方向称为向下。在图1和随后给出的视图中的每一者中,向前、向后、向左、向右、向上和向下分别由附图标记f、b、l、r、u和d来表示。
[0051]
图1的摩托车100包括金属制的车身框架1。车身框架1包括主框架1m和后框架1r。主框架1m的前端构成头管hp。主框架1m形成为从头管hp向后并且向下延伸。后框架1r附接至主框架1m,使得从主框架1m的后端和后端附近向后并略微向上延伸。
[0052]
前叉2设置在头管hp处,以能够在左右方向lr上摆动。前轮3可转动地支撑在前叉2的下端处。车把4设置在前叉2的上端处。
[0053]
主框架1m将发动机5支撑在比头管hp更向下的位置处。燃料罐8设置为位于发动机5的上方并且位于头管hp的后方。座椅9设置在燃料罐8的后方。燃料罐8由主框架1m支撑并且位于主框架1m上方。座椅9主要由后框架1r支撑并且位于后框架1r上方。
[0054]
后臂6设置为从主框架1m的下后端向后延伸。后臂6经由枢转轴pv由主框架1m支撑。后轮7可转动地支撑在后臂6的后端处。后轮7通过发动机5所产生的动力而作为驱动轮转动。
[0055]
用于吸收在车辆行驶期间从后轮7传递至至后臂6的冲击的减振机构80设置在主框架1m的后半部分中。减振机构80包括后悬架81。下面将描述减振机构80的细节。
[0056]
树脂电池箱20固定至后框架1r,以位于座椅9下方。电池箱20储存用于向摩托车100的电气系统供应电力的电池30。此外,电池箱20储存imu(惯性测量单元)50。在以下描述中,imu称为惯性传感器。
[0057]
惯性传感器50包括加速度传感器,并且测量在彼此正交的三个轴线的方向上施加在摩托车100上的加速度。此外,惯性传感器50包括陀螺仪传感器,并且测量围绕上述三个轴线中的每一者而产生的角速度作为摩托车100的行驶状态。此外,惯性传感器50输出这些测量结果。
[0058]
座椅9的下方还设置有ecu(电子控制单元)60。ecu 60可以储存在电池箱20中,也可以不储存在电池箱20中。ecu 60基于从惯性传感器50输出的各种测量结果来控制摩托车100中的各种操作元件。
[0059]
例如,根据本实施例的摩托车100设置有abs(防抱死制动系统)。abs主要由主缸、卡钳和液压单元构成。在这种情况下,ecu 60基于从惯性传感器50输出的各种测量结果来控制abs的液压单元70(参见图4,下述)的操作。因此,根据车辆的状态来适当地控制abs。
[0060]
[2]惯性传感器50在摩托车100中的附接状态
[0061]
图2是用于说明惯性传感器50在摩托车100中的附接状态的示意性立体图,而图3是图2的电池箱20的俯视图。在图2中,为了便于理解电池30与惯性传感器50之间的位置关系,电池30用浅阴影线表示,而惯性传感器50用深阴影线表示。在本实施例中,电池30具有在左右方向lr上延伸的大致长方体形状,并且具有相对大的重量(大约5千克)。另一方面,惯性传感器50具有在上下方向ud上平坦的大致长方体形状,并且与电池30相比具有足够小的重量(大约几十克)。
[0062]
如图2所示,后框架1r包括一对左、右上轨道11和一对左、右下轨道12。左、右上轨道11形成为沿左右方向lr布置并且平行于前后方向fb延伸,并且其后端彼此连接。另一方面,左、右下轨道12形成为从左、右上轨道11的后端附近延伸同时向下并向前弯曲。通过这种构造,后框架1r在俯视图中大致上具有u形形状。
[0063]
如图2中的粗虚线所示,上固定部分19l、19r形成在左上轨道11沿前后方向fb的大致中心部分和右上轨道11沿前后方向fb的大致中心部分中。在上固定部分19l、19r中形成有螺栓可以插入其中的孔。
[0064]
左、右上轨道11的前端11e和左、右下轨道12的前端12e分别连接并且固定至图1的主框架1m。左下轨道12的位于比前端12e靠后一定距离的位置处的部分通过金属制带状耦
接板13耦接至右下轨道12的位于比前端12e靠后一定距离的位置处的部分。分别对应于电池箱20的下述的左下固定部分28l和右下固定部分28r(图3)的、两个下固定部分13a形成在带状耦接板13中。在两个下固定部分13a中形成有螺栓可以插入其中的孔。
[0065]
如图2和图3所示,电池箱20具有底壁21、左壁22和右壁23。底壁21在车辆的俯视图中具有在前后方向fb上延伸的矩形形状。左壁22形成为从底壁21的左边缘向上延伸。右壁23形成为从底壁21的右边缘向上延伸。
[0066]
底壁21的大致中心部分比底壁21的其余部分更向下突出。底壁21的大致中心部分称为电池箱20的底部部分27。通过这种构造,底壁21中的底部部分27的周缘部分用作用于提高电池箱20的刚度的肋。因此,尽管电池箱20由树脂形成,但其具有高刚度。在图3中,电池箱20的底部部分27由粗单点划线表示。
[0067]
如图3所示,两个下固定部分28l、28r、惯性传感器固定部分29和线缆固定部分27w形成在电池箱20的底部部分27中。两个下固定部分28l、28r形成为在左右方向lr上布置成彼此间隔开。在每个下固定部分28l、28r中形成有通孔h0。惯性传感器固定部分29具有平坦的矩形上表面。惯性传感器固定部分29的上表面用作用于固定惯性传感器50的固定表面。在惯性传感器固定部分29中形成有四个通孔h1。
[0068]
此外,惯性传感器固定部分29的前半部分形成为位于两个下固定部分28l、28r之间。线缆固定部分27w形成在惯性传感器固定部分29附近并且与两个下固定部分28l、28r中的右下固定部分28r相邻的位置处。下面将描述线缆固定部分27w的细节。
[0069]
在车辆的俯视图中,电池固定部分24l在底壁21中形成在左壁22与底部部分27之间。此外,在车辆的俯视图中,电池固定部分24r在底壁21中形成在右壁23与底部部分27之间。电池固定部分24l、24r具有平坦的带状上表面。电池固定部分24l、24r的上表面在上下方向ud上的高度彼此相等。电池固定部分24l、24r的后端处分别形成有台阶部分sl、sr。
[0070]
如图3中的虚线所示,在底壁21中,左电池固定部分24l的后方形成有金属板固定部分25。金属板固定部分25具有平坦的矩形上表面。金属板固定部分25的上表面用作用于固定下述的基底金属板230的固定表面(图7和图8)。金属板固定部分25中形成有两个通孔h2。
[0071]
上固定部分26l形成在左壁22的后端附近,以从左壁22的上端向左突出一定距离。此外,上固定部分26r形成在右壁23的后端附近,以从右壁23的上端向右突出一定距离。每个上固定部分26l、26r中形成有通孔h3。
[0072]
如图2中的粗双点划线箭头所示,当电池箱20附接至后框架1r时,电池箱20的左下固定部分28l和右下固定部分28r分别通过螺栓和螺母连接至带状耦接板13的两个下固定部分13a。此外,电池箱20的左上固定部分26l和右上固定部分26r分别通过螺栓和螺母连接至后框架1r的左上固定部分19l和右上固定部分19r。因此,电池箱20固定至后框架1r。
[0073]
如图2中的粗虚线箭头所示,惯性传感器50在俯视图中具有等于或小于图4的惯性传感器固定部分29的外形,并且固定至电池箱20的底部部分27。更具体地,惯性传感器50固定至底部部分27的惯性传感器固定部分29(图3)。
[0074]
电池30在纵向方向(电池30延伸的左右方向lr)上的维度大于左电池固定部分24l与右电池固定部分24r之间的距离,并且小于图3中的左壁22与右壁23之间的距离。
[0075]
如图2中的粗单点划线箭头所示,电池30固定在电池箱20中,使得电池30在纵向方
向上的两端分别支撑在左电池固定部分24l和右电池固定部分24r上。图2中的气球示出了惯性传感器50和电池30固定在电池箱20中。
[0076]
图4是示出图2的电池箱20中储存的各种构成元件之间的位置关系的俯视图。在图4中,主框架1m和后框架1r用不同方向的两种类型的阴影线来表示,以便于理解主框架1m、后框架1r与电池箱20之间的连接状态。此外,电池箱20由虚线图案表示。此外,在图4中,固定在电池箱20中的电池30和惯性传感器50由粗单点划线表示。
[0077]
如图2中的气球和图4所示,电池30固定在电池箱20中的惯性传感器50的固定部分(底部部分27)附近,以在车辆的俯视图中与惯性传感器50的至少一部分重叠。因此,因为电池30具有相对大的重量,所以即使在车辆行驶期间振动从车身框架1传递至电池箱20的情况下,底部部分27的振动也由于电池30的重量而受到抑制。在车辆行驶期间从车身框架1传递至电池箱20的振动包括产生于发动机5的振动、产生于前轮3中的振动、产生于后轮7中的振动等。
[0078]
此外,由于上述电池箱20由树脂制成,所以除底部部分27及其附近以外的部分具有一定程度的柔性。因此,在车辆行驶期间从车身框架1传递至电池箱20的振动的一部分被电池箱20吸收。因此,减少了在车辆行驶期间传递至惯性传感器50的振动。
[0079]
这里,图4的电池30在比惯性传感器50更靠上的位置处固定至电池箱20,以在车辆的俯视图中与整个惯性传感器50重叠。通过这样的构造,为了从摩托车100的外部接近惯性传感器50,需要从车身框架1上依次移除座椅9和电池30。因此,在根据本实施例的摩托车100中,增加了从摩托车100的外部接近惯性传感器50的难度。结果,防止了惯性传感器50的被盗,并且抑制了由用户不慎触摸惯性传感器50而引起的测量精度的降低。
[0080]
此外,在摩托车100中,惯性传感器50布置为与图4的车辆中心轴线cl重叠,车辆中心轴线cl在车辆的俯视图中在前后方向fb上延伸。在这种情况下,通过惯性传感器50更精确地测量了摩托车100的惯性。
[0081]
在本实施例中,如图4中的粗双点划线所示,除了电池30和惯性传感器50之外,液压单元70和电气部件71也固定在电池箱20中。液压单元70构成设置在摩托车100中的abs的一部分。电气部件71包括构成摩托车100的电气系统的一部分的保险丝和连接器。以这种方式,除了电池30和惯性传感器50之外,摩托车100中的用于液体(诸如制动流体或油)的供应系统的一部分和电气系统的一部分也储存在电池箱20中。
[0082]
在图4的示例中,液压单元70具有比惯性传感器50充分地更大的重量,并且固定在电池箱20中以与电池30相邻。因此,诸如电池30和液压单元70的具有相对较大重量的构件在电池箱20中聚集在底部部分27及其附近。因此,产生于电池箱20中的惯性传感器50附近的振动因电池30和液压单元70的重量而减小。此外,因为液压单元70储存在电池箱20中,所以抑制了由将液压单元70设置在电池箱20外部而引起的座椅9的高度的增加。
[0083]
[3]减振机构80、后轮7与电池箱20之间的位置关系
[0084]
图5和图6是用于说明减振机构80、后轮7与电池箱20之间的位置关系的车辆后半部分的示意性透视侧视图。在图5和图6中,电池箱20、电池30和惯性传感器50由粗单点划线表示。同时,包括摩托车100的后臂6、减振机构80和后轮7的部分结构由实线表示。
[0085]
如图5所示,减振机构80包括后悬架81、第一连杆构件82和第二连杆构件83。后悬架81设置在比后轮7更靠前的位置处以朝向车辆后方的位置向下倾斜地延伸。
[0086]
后悬架81的前端连接至主车身框架1m中的燃料罐8附近的部分。第一连杆构件82连接至后悬架81的后端。第一连杆构件82还连接至后臂6的一部分并且连接至第二连杆构件83。第二连杆构件83还连接至主框架1m的下端。
[0087]
关于主框架1m与后悬架81之间的连接部分、后悬架81与第一连杆构件82之间的连接部分以及第一连杆构件82与后臂6之间的连接部分,一个构件和另一个构件能够围绕平行于左右方向lr的轴线相对于彼此转动。此外,在第一连杆构件82与第二连杆构件83之间的连接部分以及第二连杆构件83与主框架1m之间的连接部分中的每一者中,一个构件和另一个构件能够围绕平行于左右方向lr的轴线相对于彼此转动。
[0088]
通过上述构造,后臂6的一部分经由后悬架81支撑在主框架1m处,以能够在车辆的上下方向上摆动。因此,当产生于后轮7中的冲击传递至后悬架81时,后悬架81吸收所传递的冲击。
[0089]
图5示出了当后轮7中没有产生冲击时车辆的后半部分的状态,即,当后悬架81没有吸收冲击时车辆的后半部分的状态。在下面的描述中,图5所示的车辆的状态称为正常状态。另一方面,图6示出了当后悬架81通过吸收产生于后轮7中的冲击而最大程度地收缩时车辆后半部分的状态。在下面的描述中,图6所示的车辆状态称为最大冲击状态。
[0090]
在图6中,虚线还表示正常状态下的后臂6、减振机构80和后轮7的状态。如图5和图6所示,在摩托车100行驶期间,后臂6和后轮7根据产生于路面与后轮7之间的冲击的大小,围绕枢转轴pv在上下方向ud上转动(摆动)。
[0091]
这里,当摩托车100处于最大冲击状态时,电池箱20设置为在车辆的侧视图中不与后悬架81及后轮7重叠。此外,电池箱20设置为使得在车辆的侧视图中底部部分27在前后方向fb上朝向后悬架81与后轮7之间的位置突出。
[0092]
通过上述构造,惯性传感器50固定至电池箱20的底部部分27,以在车辆的侧视图中位于后悬架81的运动范围和后轮7的运动范围的外部的无效空间中。因此,有效地利用了摩托车100中的无效空间作为设置惯性传感器50的空间。因此,可以在不增加座椅9的高度的情况下将惯性传感器50布置在电池箱20中。
[0093]
[4]电池30和惯性传感器50的固定状态的细节
[0094]
图7是用于说明电池30和惯性传感器50在电池箱20中的固定状态的细节的示意性透视侧视图。图8是用于说明电池30和惯性传感器50在电池箱20中的固定状态的细节的示意性透视立体图。在图7和图8中,电池箱20的一部分的形状由虚线表示。
[0095]
如图7所示,橡胶垫圈gr在电池箱20的底部部分27处装配到惯性传感器固定部分29的四个通孔h1(图3)中。在图7中,垫圈gr用阴影线表示。惯性传感器50经由四个垫圈gr通过四个螺栓和四个螺母连接至惯性传感器固定部分29。以这种方式,因为惯性传感器50经由多个垫圈gr固定至惯性传感器固定部分29,所以抑制了在车辆行驶期间产生于电池箱20中的振动传递至惯性传感器50。因此,能够以高精度测量摩托车100的惯性。
[0096]
在电池箱20中,设置有金属制的固定机构200,其配置为能够将电池30固定在电池箱20中并且能够将电池30从电池箱20拆卸。如图7和图8所示,固定机构200包括第一固定构件210、第二固定构件220和基底金属板230。
[0097]
在本实施例中,例如,对一根硬线缆执行弯曲处理,并且将线缆的一端与另一端彼此连接,由此制造出第一固定构件210。本示例的第一固定构件210形成为描绘出具有一定
宽度并且在一个方向上延伸的条带。第一固定构件210具有第一端211和第二端212。
[0098]
例如,在一片金属板上执行冲压处理、弯曲处理等,由此制造出第二固定构件220和基底金属板230中的每一者。第二固定构件220具有第三端221和第四端222。基底金属板230具有第五端231和第六端232。
[0099]
第一固定构件210的第一端211连接至电池箱20的线缆固定部分27w。第一固定构件210的第二端212连接至第二固定构件220的第三端221。这里,第二端212与第三端221之间的连接部分形成铰链。因此,第二固定构件220能够通过第一固定构件210的第二端212围绕平行于左右方向lr的轴线转动。
[0100]
基底金属板230的第六端232通过螺栓固定至金属板固定部分25。在这种状态下,基底金属板230的第五端231位于金属板固定部分25的上方。
[0101]
第二固定构件220围绕第一固定构件210的第二端212转动,由此第二固定构件220的第四端222和基底金属板230的第五端231彼此接触或彼此远离。此外,第四端222和第五端231配置为能够在彼此接触的同时通过螺栓和螺母彼此连接。
[0102]
这里,电池30具有在电池箱20中主要面向前方的第一表面31和在电池箱20中主要面向上方的第二表面32。此外,电池30具有在电池箱20中主要面向下方的第三表面33和在电池箱20中主要面向后方的第四表面34。
[0103]
当将电池30固定在电池箱20中时,电池30放置在左电池固定部分24l和右电池固定部分24r上(图3)。此时,第三表面33的一部分抵靠电池固定部分24l、24r,而第四表面34的一部分抵靠左台阶sl和右台阶sr(图3),由此电池30暂时地定位在电池箱20中。此外,第一固定构件210沿着电池30的第一表面31从线缆固定部分27w向上延伸。
[0104]
在这种状态下,如图7和图8中的粗单点划线箭头所示,第二固定构件220围绕第一固定构件210的第二端212转动,从而能够紧密接近电池30的第二表面32或与电池30的第二表面32间隔开。
[0105]
橡胶制的冲击缓冲构件sg设置在第二固定构件220的一部分上,从而由于第二固定构件220紧密接近第二表面32而与第二表面32接触。在第二固定构件220经由冲击缓冲构件sg支撑在电池30的第二表面32上的情况下,第二固定构件220的第四端222与基底金属板230的第五端231重叠。这样,第四端222和第五端231通过螺栓和螺母彼此连接,由此电池30固定在电池箱20中的底部部分27附近。
[0106]
另一方面,当从电池箱20移除电池30时,拆卸连接第四端222和第五端231的螺栓和螺母。因此,可以通过从电池30的第二表面32拆卸第二固定构件220来从电池箱20移除电池30。
[0107]
通过上述构造,可以通过固定机构200容易且牢固地将电池30固定在电池箱20中。因此,抑制了在车辆行驶期间由于电池30相对于电池箱20的移动而在电池箱20的底部部分27中产生振动。因此,能够通过惯性传感器50以高精度测量摩托车100的惯性。此外,可以容易地移除固定至电池箱20的电池30。因此,可以容易地更换电池30。
[0108]
根据本实施例的惯性传感器50具有用于将惯性传感器50附接至惯性传感器固定部分29的上表面的平坦附接表面。在本实施例中,如图7所示,惯性传感器50固定在电池箱20中,使得由惯性传感器50的附接表面和水平面rp形成的角度θ不大于15
°
。以这种方式,因为惯性传感器50相对于水平面rp的倾斜不大于15
°
,所以能够以高精度测量摩托车100的惯
性。为了以更高的精度测量摩托车100的惯性,优选地由惯性传感器50的附接表面和水平面rp形成的角度θ等于或小于12
°
。
[0109]
如图7所示,惯性传感器固定部分29和电池固定部分24l、24r形成为使得电池30与惯性传感器50之间的距离ds小于电池30在上下方向ud上的厚度的一半。在这种情况下,惯性传感器固定部分29与电池固定部分24l、24r中的每一者之间的距离充分小,使得惯性传感器50的振动更容易被电池30的重量抑制。
[0110]
[5]电池箱20与后框架1r的固定状态的细节
[0111]
图9示出用于说明电池箱20与后框架1r的固定状态的细节的立体图和部分横截面图。在图9中,外部立体图示出了电池箱20固定至后框架1r。此外,在图9中,气球ba1中示出了电池箱20的上固定部分26l与后框架1r的上固定部分19l之间的连接部分的横截面。此外,气球ba2中示出了电池箱20的下固定部分28l与带状耦接板13的左下固定部分13a之间的连接部分的横截面。
[0112]
如图9中的气球ba1所示,垫圈gr装配到电池箱20的上固定部分26l中的通孔h3中。因此,电池箱20的上固定部分26l经由垫圈gr定位在后框架1r的上固定部分19l上。在这种状态下,电池箱20的上固定部分26l和后框架1r的上固定部分19l通过螺栓bt和螺母nt彼此连接。电池箱20的上固定部分26r与后框架1r的上固定部分19r之间的连接部分的结构与电池箱20的上固定部分26l与后框架1r的上固定部分19l之间的连接部分的结构相同。
[0113]
如图9中的气球ba2所示,垫圈gr装配到电池箱20的下固定部分28l中的通孔h0中。因此,电池箱20的下固定部分28l经由垫圈gr定位在带状耦接板13的左下固定部分13a上。在这种状态下,电池箱20的下固定部分28l和带状耦接板13的左下固定部分13a通过螺栓bt和螺母nt彼此连接。电池箱20的下固定部分28r与带状耦接板13的右下固定部分13a之间的连接部分的结构与电池箱20的下固定部分28l与带状耦接板13的左下固定部分13a之间的连接部分的结构相同。
[0114]
通过上述构造,因为电池箱20经由多个垫圈gr固定至后框架1r,所以抑制了在车辆行驶期间产生于后框架1r中的振动传递至电池箱20。因此,能够以更高的精度测量摩托车100的惯性。
[0115]
[6]效果
[0116]
在上述摩托车100中,惯性传感器50固定至电池箱20的底部部分27。因此,有效地使用后悬架81相对于车身框架1的运动范围和后轮7的运动范围的外部的无效空间作为惯性传感器50的安装空间。因此,可以在不增加座椅9的高度的情况下将惯性传感器50布置在电池箱20中。
[0117]
此外,通过上述构造,电池30在惯性传感器50上方的位置处固定至电池箱20,从而在车辆的俯视图中与惯性传感器50重叠。在这种情况下,电池30所附接至的部分紧密接近惯性传感器50在电池箱20中所附接的部分。因此,即使在车辆行驶期间振动从车身框架1传递至电池箱20的情况下,电池箱20的底部部分27的振动也受到电池30的重量的抑制。此外,由于由树脂制成,上述电池箱20吸收从车身框架1传递的振动的一部分。因此,减少了产生于惯性传感器50中的振动。
[0118]
另外,通过上述构造,惯性传感器50固定至电池箱20的惯性传感器固定部分29。此外,电池30和座椅9存在于惯性传感器50上方。因此,增加了从摩托车100的外部接近惯性传
感器50的难度。此外,因为惯性传感器50设置在电池箱20的内部,所以防止了在车辆行驶期间摩托车100外部飞溅的雨水或散落的灰尘附着到惯性传感器50。
[0119]
因此,抑制了由于设置惯性传感器50而导致的车辆尺寸的增大,同时保持了惯性传感器50对惯性的高检测精度。
[0120]
[7]其他实施例
[0121]
(a)虽然在上述实施例中惯性传感器50经由多个垫圈gr固定至电池箱20,但是本教导并不限于此。惯性传感器50可以直接固定至电池箱20。
[0122]
(b)虽然在上述实施例中电池箱20经由多个垫圈gr固定至后框架1r,但是本教导并不限于此。电池箱20可以直接固定至后框架1r。
[0123]
(c)虽然在上述实施例中使用金属制的固定机构200将电池30固定至电池箱20,但是本教导并不限于此。电池30可以通过由布料或橡胶等制成的带状构件固定至电池箱20。替代地,电池30可以通过螺栓直接固定至电池箱20。
[0124]
(d)虽然在上述实施例中液压单元70固定在电池箱20中从而在前后方向fb上与电池30相邻,但是本教导并不限于此。液压单元70可以固定在电池箱20中,从而在左右方向lr上与电池30相邻。
[0125]
(e)虽然在上述实施例中液压单元70固定在电池箱20中,但是液压单元70可以设置在电池箱20的外部。
[0126]
(f)后悬架81相对于水平面倾斜的程度不限于上述实施例中图5和图6的示例。后悬架81可以设置在比后轮7更靠前的位置处以朝向车辆后方的位置向下倾斜地延伸。因此,后悬架81可以设置为使得后悬架81延伸的方向与水平面之间的角度小于图5和图6的示例的角度。替代地,后悬架81可以设置为使得后悬架81延伸的方向与水平面之间的角度大于图5和图6的示例的角度。
[0127]
(g)虽然上述实施例是将本教导应用于摩托车的示例,但是本教导并不限于此。本教导可以应用于其他骑乘式车辆,诸如四轮汽车、机动三轮车或atv(全地形车辆)。
[0128]
[8]权利要求中的构成元件与优选实施例中的部件之间的对应性
[0129]
在下面的段落中,说明在以下权利要求中列举的各种元件与以上相对于本教导的各种优选实施例描述的那些元件之间的对应性的非限制性示例。
[0130]
在上述实施例中,车身框架1、主框架1m和后框架r1是车身框架的示例,座椅9是座椅的示例,电池30是电池的示例,惯性传感器50是惯性测量装置的示例,电池箱20是电池箱的示例,后臂6是后臂的示例,后轮7是驱动轮的示例,后悬架81是后悬架的示例,电池箱20的底部部分27是电池箱的底部部分的示例。
[0131]
此外,摩托车100是骑乘式车辆的示例,液压单元70是液压单元的示例,垫圈gr是第一冲击缓冲构件和第二冲击缓冲构件的示例,图4的车辆中心轴线cl是车辆中心轴线的示例,固定机构200是固定机构的示例,电池30的第一表面31是第一表面的示例,电池30的第二表面32是第二表面的示例。
[0132]
此外,第一端211是第一端的示例,第二端212是第二端的示例,第一固定构件210是第一固定构件的示例,第三端221是第三端的示例,第四端222是第四端的示例,第二固定构件220是第二固定构件的示例,液压单元70是操作元件的示例,并且ecu 60是控制器的示例。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips