
 商标分类
商标分类  商标转让
商标转让 
一种自卸汽车的制作方法
 2021-02-03 16:02:09|
2021-02-03 16:02:09| 303|
303| 起点商标网
起点商标网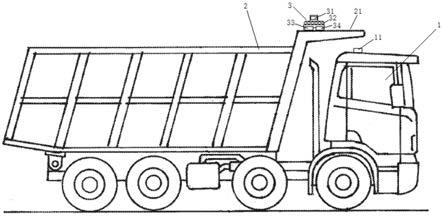
[0001]
本实用新型涉及自动驾驶车辆技术领域,尤其涉及一种自卸汽车。
背景技术:
[0002]
自卸汽车利用本车发动机动力驱动液压举升机构,将其车厢倾斜一定角度卸货,并依靠车厢自重使其复位的专用汽车。非公路运输用的重型和超重型自卸汽车主要承担大型矿山、水利工地等运输任务,通常与挖掘机配套使用。这类汽车也称为矿用自卸汽车。它的长度、宽度、高度等外廓尺寸以及轴荷等不受公路法规的限制,广泛应用于矿山、工地上。
[0003]
自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。相较于主要行驶在行驶条件复杂的城市道路上的车辆,矿用自卸汽车主要在非铺设路面上行驶,行驶场景相较简单,行驶场景几乎不包含红绿灯、十字路口、行人以及各种不可预测的道路状况。近年来,自动驾驶的自卸汽车逐渐开始产品化以供采矿业使用。
[0004]
自动驾驶时,车辆可能的行驶场景包括井下或者坑道等对车辆的长度、宽度、高度等外廓尺寸。因此,对自卸汽车对周围环境的感知能力和车载传感器布置提出了极高的要求。现有的自动驾驶自卸汽车所搭载的传感器具有扫描测绘精度高的优点,但是其价格也是比较昂贵,导致大幅度提高了自动驾驶的自卸汽车制造成本,不利于此类智能汽车的推广普及。因此亟待提供一种具有在不增加传感器数量的情况下扩大传感器探测范围的传感控制设备,能够适应路面或者坑道行驶场景,可以同时兼顾行驶和装卸等作业场景的自卸汽车。
技术实现要素:
[0005]
针对现有技术中存在的上述问题,现提供一种用于自卸汽车,旨在提供一种具有在不增加传感器数量的情况下扩大传感器探测范围的传感控制设备,能够适应路面或者坑道行驶场景,可以同时兼顾行驶和装卸等作业场景的自卸汽车。
[0006]
上述技术方案具体包括:
[0007]
一种自卸汽车,包括一驾驶室与一翻斗,翻斗包括一护板,护板延伸至驾驶室的上方;
[0008]
自卸汽车还包括一传感控制设备,设置于护板上,传感控制设备包括
[0009]
一激光扫描器,设置于传感控制设备的上部;
[0010]
一视频采集器,设置于传感控制设备的中部;
[0011]
一蓄电池组,设置于传感控制设备的下部并分别连接激光扫描器和视频采集器,用于为传感控制设备的运行提供所需电能。
[0012]
优选的,还包括一充电输出接口,设置于驾驶室的顶部。
[0013]
优选的,传感控制设备还包括一充电输入接口,设置于传感控制设备的下部,分别连接蓄电池组和充电输出接口。
[0014]
优选的,还包括一第一信号传输单元,设置于驾驶室的内部。
[0015]
优选的,传感控制设备还包括一信号转换器,设置于传感器设备的下部,分别连接激光扫描器和视频采集器。
[0016]
优选的,传感控制设备还包括一第二信号传输单元,设置于传感控制设备上部,分别连接信号转换器和第一信号传输单元。
[0017]
优选的,激光扫描器沿水平方向扫描的旋转角度包括360
°
。
[0018]
优选的,视频采集器包括多个高清摄像头,高清摄像头圆周阵列安装于传感控制设备中部的外侧面上。
[0019]
上述技术方案的有益效果在于:能够在不增加传感器数量的条件下,利用尽可能少的传感器为自卸汽车提供兼顾行驶和作业场景下的环境感知能力。
附图说明
[0020]
参考所附附图,以更加充分地描述本发明的实施例。然而,所附附图仅用于说明和阐述,并不构成对本发明范围的限制。
[0021]
图1是本实用新型的较佳的实施例中,一种用于自卸汽车的结构示意图。
[0022]
图2是本实用新型的较佳的实施例中,一种用于自卸汽车的传感控制设备的结构示意图。
具体实施方式
[0023]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0024]
需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
[0025]
下面结合附图和具体实施例对本实用新型作进一步说明,但不作为本实用新型的限定。
[0026]
基于现有技术中存在的上述问题,本实用新型提供一种自卸汽车,如图1所示,包括一驾驶室1与一翻斗2,翻斗2包括一护板,护板延伸至驾驶室1的上方;
[0027]
自卸汽车还包括一传感控制设备3,设置于护板上,用于在车辆行驶时用于检测道路状况,在车辆作业时检测翻斗2的装载状况。
[0028]
如图2所示,传感控制设备3包括一激光扫描器31,设置于传感控制设备3的上部;一视频采集器32,设置于传感控制设备3的中部;一蓄电池组33,设置于传感控制设备3的下部并分别连接激光扫描器31和视频采集器32,蓄电池组33为传感控制设备3的运行提供所需电能。
[0029]
具体地,激光扫描器31为激光雷达或其他激光扫描设备,可以在汽车行驶时对道路状况进行扫描成像从而采集道路状况信息;在作业时对翻斗2内部进行扫描成像从而检测其装载状况信息。视频采集器32用于实时采集图像视频信号,可进一步提高环境检测和感知能力。用于给传感控制设备3中的激光雷达等传感器供电的蓄电池组33包括可快速进
行充电的锂金属电池组。
[0030]
本实用新型的较佳的实施例中,自卸汽车还包括一充电输出接口11,设置于驾驶室1的顶部。
[0031]
本实用新型的较佳的实施例中,传感控制设备3还包括一充电输入接口34,设置于传感控制设备3的下部,分别连接蓄电池组33和充电输出接口11。
[0032]
具体地,传感控制设备3的充电输入接口34为无线充电接收器,安设在驾驶室1顶部的充电输出接口11为无线充电发射器。当翻斗2从倾倒位置回到水平位置时,无线充电接收器与无线充电发射器之间的距离很短,无线充电发射器利用车载电源将电能经过无线充电接收器传递到锂金属电池组中。车载电源包括发电机或者车载的14v或28v dc/dc,从而满足传感控制设备33所需的供电需求。
[0033]
进一步地,上述实施例中,充电输入接口34和充电输出接口11的电能传输方式还可以包括接触式或线缆连接。
[0034]
本实用新型的较佳的实施例中,自卸汽车还包括一第一信号传输单元,设置于驾驶室1的内部。
[0035]
本实用新型的较佳的实施例中,传感控制设备3还包括一信号转换器,设置于传感器设备的下部,分别连接激光扫描器31和视频采集器32。
[0036]
本实用新型的较佳的实施例中,传感控制设备3还包括一第二信号传输单元,设置于传感控制设备3上部,分别连接信号转换器和第一信号传输单元。
[0037]
具体地,自卸汽车在进行装载或者倾倒作业时,安设在翻斗2上的传感控制设备3通过激光扫描器31和视频采集器32检测翻斗2内部的装载状况并向信号转换器实时输出关于装载或倾倒情况的监测信号。信号转换器对第一信号传输单元的监测信号进行处理,通过第二信号传输单元向位于驾驶室1内部的第一信号传输单元发送经过处理后的监测信号。设置于驾驶室1的底层控制器根据监测信号发出指令,控制自卸汽车的进行变动停车位置或者对翻斗2的动作姿态进行调整,与装载机械配合作业,以快速装满车辆或者快速地倾倒完翻斗2,从而提高作业效率。
[0038]
进一步地,传感控制设备3的各单元之间的连接方式包括电缆或线束连接,以传递各种信号。由于翻斗2在倾倒时使得传感控制设备3的位置相对于其他控制器的位置发生较大的变化,电缆和线束的距离因此设置得较长。在本实施例中,优选地采用无线通讯的方式来传递各种信号。传感控制设备3设置于护板上,则在自卸汽车进行装载或者倾倒作业,尤其是倾倒作业时,可以实现通过同一传感器来检测翻斗2的装载状况,无需在车体多个位置设置多个传感器。
[0039]
本实用新型的较佳的实施例中,激光扫描器31沿水平方向扫描的旋转角度包括360
°
。
[0040]
本实用新型的较佳的实施例中,视频采集器32包括多个高清摄像头,高清摄像头圆周阵列安装于传感控制设备3中部的外侧面上。上述实施例中,自卸汽车的驾驶室1内还设置有显示器,用于显示经过处理后的监测信号以辅助驾驶员操控车辆。具体地,显示器可同时显示多个高清摄像头的视频信息。
[0041]
以上仅为本实用新型较佳的实施例,并非因此限制本实用新型的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本实用新型说明书及图示内容所
作出的等同替换和显而易见的变化所得到的方案,均应当包含在本实用新型的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips