
 商标分类
商标分类  商标转让
商标转让 
车辆控制装置以及车辆控制系统的制作方法
 2021-02-03 16:02:21|
2021-02-03 16:02:21| 249|
249| 起点商标网
起点商标网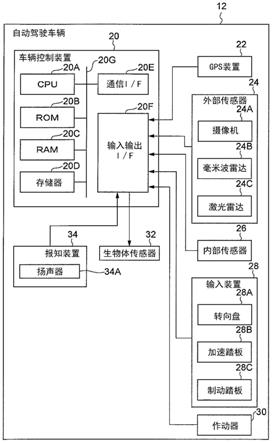
[0001]
本发明涉及能够实施自动驾驶以及远程驾驶的车辆控制装置以及车辆控制系统。
背景技术:
[0002]
在日本特开2018-077649号公报中,公开了如下的车辆,该车辆设为,能够在由车辆的成员的操作而实施的手动驾驶、车辆的自主行驶即自动驾驶、由对远程操作装置进行操作的远程驾驶员而实施的远程驾驶等的驾驶状态下进行行驶。
[0003]
然而,在能够实施自动驾驶以及远程驾驶的车辆中,在判断出因急病等而使得由乘员的操作而实施的驾驶有困难的情况下,能够向远程驾驶进行切换以避免危险。此外,为了恰当地向远程驾驶进行切换,希望在对乘员的意向进行确认的基础上向远程驾驶进行切换。
技术实现要素:
[0004]
发明所要解决的课题
[0005]
本发明的目的在于,提供一种能够在对乘员的意向进行确认的基础上将车辆向远程驾驶进行切换的车辆控制装置以及车辆控制系统。
[0006]
用于解决课题的方法
[0007]
本发明的第一方式所涉及的车辆控制装置具备:通信部,其被配置在车辆的外部,并且从通过远程驾驶员而被操作的操作装置接收用于使所述车辆进行操作的操作信息;取得部,其从周边信息检测部取得所述车辆的周边的周边信息;行驶计划生成部,其根据所述车辆的所述周边信息而生成所述车辆的行驶计划;生物体信息取得部,其取得乘员的生物体信息;状态判断部,其根据由所述生物体信息取得部所取得的所述生物体信息,来判断是否处于被预测为由乘员的操作实施的手动驾驶会变得困难的困难状态;报知部,其在通过所述状态判断部而判断出处于所述困难状态的情况下,从被设置在所述车辆的车内的报知装置报知对所述乘员的安全与否进行确认的确认信息;受理部,其受理来自被进行了安全与否的确认的所述乘员的响应;通知部,其在所述受理部中未受理到响应的情况下,将切换信息通知给所述操作装置,其中,所述切换信息为将所述车辆从所述手动驾驶向远程驾驶进行切换的信息,所述远程驾驶为基于所述操作信息而进行的所述车辆的行驶;行驶控制部,其对自动驾驶和所述远程驾驶进行控制,并且在由所述操作装置受理到所述切换信息之后从所述操作装置受理到表示能够进行所述远程驾驶的可操作信息的情况下,实施所述远程驾驶,其中,所述自动驾驶为,基于由所述行驶计划生成部生成的所述行驶计划而进行的所述车辆的行驶。
[0008]
在本发明的第一方式所涉及的车辆控制装置中,能够执行自主地行驶的自动驾驶、和由操作装置而实施的远程驾驶,在根据生物体信息而被预测出车辆的手动驾驶会变得困难的情况下,从被设置在车辆的车内的报知装置报知对乘员的安全与否进行确认的确认信息。此外,车辆控制装置在未受理到来自被进行了安全与否的确认的乘员的响应的情
况下,将向远程驾驶进行切换的切换信息通知给操作装置。而且,车辆控制装置在由操作装置受理到切换信息之后从操作装置受理到表示能够进行远程驾驶的可操作信息的情况下,实施所述远程驾驶。由此,在由受理部受理到对于确认信息的响应的情况下,能够确认不需要向远程操作的切换这一乘员的意向。另一方面,在未由受理部受理到响应的情况下,能够确认需要向远程操作的切换这一乘员的意向。其结果为,能够在对乘员的意向进行确认的基础上将车辆向远程驾驶进行切换。
[0009]
本发明的第二方式所涉及的车辆控制装置为,在第一方式所记载的结构中,所述行驶控制部在通过所述状态判断部而判断出乘员处于困难状态的情况下,在受理到所述可操作信息之前从所述手动驾驶向所述自动驾驶进行切换。
[0010]
在本发明的第二方式所涉及的车辆控制装置中,在将向远程驾驶进行切换的切换信息通知给操作装置之后、到确保远程驾驶员为止的期间内,从手动驾驶向自动驾驶进行切换。
[0011]
本发明的第三方式所涉及的车辆控制装置为,在第一方式或第二方式所记载的结构中,所述通知部在通过所述状态判断部而判断出所述乘员处于所述困难状态的情况下,将涉及该困难状态的信息通知给所述操作装置,所述报知部输出作为从接受到涉及所述困难状态的信息的所述操作装置受理到的所述确认信息的语音信息,以进行报知。
[0012]
在本发明的第三方式所涉及的车辆控制装置中,当判断出乘员处于困难状态时,将涉及困难状态的信息通知给操作装置。此外,为了确认乘员的安全与否,而从报知装置输出从接受到涉及困难状态的信息的操作装置所受理到的语音信息,以进行报知。由此,能够通过对操作装置进行操作的远程驾驶员来对乘员的安全与否进行确认,并能够顺畅地向远程驾驶进行切换。此外,远程驾驶员能够在较早的阶段为远程驾驶做好准备。
[0013]
本发明的第四方式所涉及的车辆控制系统具备:第一至第三方式中的任意一个方式所记载的车辆控制装置;远程控制装置,其在接受到涉及所述困难状态的信息的情况下,从被设置在所述操作装置上的其他报知装置报知涉及所述困难状态的信息。
[0014]
在本发明的第四方式所涉及的车辆控制系统中,在通过远程驾驶员而被操作的操作装置上设置有远程控制装置。当接收车辆的成员处于困难状态的信息时,该远程控制装置能够向远程驾驶员报知成员处于困难状态的情况。其结果为,远程驾驶员能够迅速地执行紧急时的应对。
[0015]
发明效果
[0016]
根据本发明,能够在对乘员的意向进行确认的基础上将车辆向远程驾驶进行切换。
附图说明
[0017]
根据以下附图详细说明本发明的示例性实施例,其中:
[0018]
图1为表示第一实施方式所涉及的车辆控制系统的概要结构的图。
[0019]
图2为表示第一实施方式的车辆的硬件结构的框图。
[0020]
图3为表示第一实施方式的车辆控制装置的功能结构的示例的框图。
[0021]
图4为表示第一实施方式的远程操作装置的硬件结构的框图。
[0022]
图5为表示第一实施方式的远程控制装置的功能结构的示例的框图。
[0023]
图6为对第一实施方式中的各装置间的处理的流程进行说明的时序图。
[0024]
图7为对第二实施方式的交接处理的流程进行说明的流程图。
具体实施方式
[0025]
图1为,表示第一实施方式所涉及的车辆控制系统10的概要结构的框图。
[0026]
(概要)
[0027]
如图1所示的那样,第一实施方式所涉及的车辆控制系统10以包括自动驾驶车辆12和作为操作装置的远程操作装置16的方式而被构成。
[0028]
本实施方式的车辆12具备车辆控制装置20,远程操作装置16具备远程控制装置40。而且,在车辆控制系统10中,车辆12的车辆控制装置20、远程操作装置16的远程控制装置40通过网络n1而被相互连接。
[0029]
车辆12被构成为,能够通过车辆控制装置20而执行自动驾驶、远程驾驶和手动驾驶,其中,自动驾驶为根据被预先生成的行驶计划来实施自主行驶的驾驶,远程驾驶为基于远程操作装置16的远程驾驶人的操作而进行的驾驶,手动驾驶为基于车辆12的乘员(也就是说,驾驶员)的操作而进行的驾驶。
[0030]
(自动驾驶车辆)
[0031]
图2为,表示搭载于本实施方式的自动驾驶车辆12上的设备的硬件结构的框图。车辆12除了包括上述的车辆控制装置20之外,还包括gps(global positioning system)装置22,外部传感器24,内部传感器26,输入装置28,作动器30,生物体传感器32和报知装置34。
[0032]
车辆控制装置20以包括cpu(central processing unit:中央处理器)20a、rom(read only memory:只读存储器)20b、ram(random access memory:随机存取存储器)20c、存储器20d、通信i/f(inter face:接口)20e以及输入输出i/f20f的方式而被构成。cpu20a、rom20b、ram20c、存储器20d、通信i/f20e以及输入输出i/f20f通过总线20g而以能够相互通信的方式被连接。cpu20a为第一处理器的一个示例,ram20c为第一存储器的一个示例。
[0033]
cpu20a为中央运算处理单元,其执行各种程序、或对各部分进行控制。即,cpu20a从rom20b读取程序,并将ram20c作为工作区域而执行程序。在本实施方式中,在rom20b中存储有执行程序。通过由cpu20a来执行该执行程序,从而车辆控制装置20作为图3所示的位置取得部200、周边信息取得部210、车辆信息取得部220、行驶计划生成部230、操作受理部240、行驶控制部250、生物体信息取得部260、状态判断部270、报知部280、受理部290、通知部300而发挥功能。
[0034]
如图2所示的那样,rom20b对各种程序以及各种数据进行存储。ram20c作为工作区域而临时性地对程序或数据进行存储。
[0035]
作为存储部的存储器20d由hdd(hard disk drive:硬盘驱动器)或ssd(solidstate drive:固态驱动器)而构成,并对包括操作系统的各种程序、以及各种数据进行存储。此外,后述的涉及困难状态的信息、生物体信息在被建立了关联的状态下被存储于存储器20d中。
[0036]
作为通信部的通信i/f20e为了与其他车辆控制装置20、远程控制装置40以及未图示的信息服务器等进行通信,从而包括用于与网络n1连接的接口。该接口例如使用lte(long term evolution:长期演进)、wi-fi(注册商标)等的通信规格。
[0037]
本实施方式的通信i/f20e通过网络n1而朝向车辆12的外部的远程操作装置16发送由摄像机24a拍摄到的拍摄图像,并从远程操作装置16接收用于使车辆12进行操作的操作信息、即远程操作信息。另外,通信i/f20e也可以通过网络n1而从外部的信息服务器接收气象信息或地震信息、交通拥堵、事故、道路工程等的交通信息。
[0038]
输入输出i/f20f为,用于与搭载在车辆12上的各装置进行通信的接口。本实施方式的车辆控制装置20通过输入输出i/f20f而连接有gps装置22、外部传感器24、内部传感器26、输入装置28、作动器30、生物体传感器32、报知装置34。另外,gps装置22、外部传感器24、内部传感器26、输入装置28、作动器30、生物体传感器32、报知装置34也可以与总线20g直接连接。
[0039]
gps装置22为对车辆12的当前位置进行测定的装置。gps装置22包括对来自gps卫星的信号进行接收的天线(省略图示)。
[0040]
作为周边信息检测部的外部传感器24为,对车辆12的周围的周边信息进行检测的传感器组。外部传感器24包括对预定范围进行拍摄的摄像机24a、在预定范围内发送探测波并接收反射波的毫米波雷达24b、和对预定范围进行扫描的激光雷达(laser imaging detection and ranging)24c。
[0041]
内部传感器26为,对车辆12的行驶状态进行检测的传感器组。内部传感器26包括车速传感器、加速度传感器以及横摆率传感器中的至少一个。
[0042]
输入装置28为,用于乘坐车辆12的乘员进行操作的开关群。输入装置28包括作为使车辆12的转向轮转向的开关的转向盘28a、作为使车辆12加速的开关的加速踏板28b、以及作为使车辆12减速的开关的制动踏板28c。
[0043]
作动器30包括使车辆12的转向轮驱动的转向盘作动器、对车辆12的加速进行控制的加速器作动器、以及对车辆12的减速进行控制的制动器作动器。
[0044]
生物体传感器32包括对用于推断车辆的乘员的后述的生物体信息的信息进行检测的各种传感器。作为一个示例,生物体传感器32包括对乘员的头部进行拍摄的车载摄像机、对乘员的体温进行检测的热成像摄像机、对车厢内产生的声音进行收音的收音话筒、对落座乘员相对于座椅的载荷进行检测的体压传感器、对织带的拉出量进行检测的织带传感器、对乘员的生命活动进行检测的各种传感器中的至少一个。
[0045]
报知装置34为,为了报知用于乘员的安全与否确认的确认信息而被设置在车内的输出用的接口。本实施方式的报知装置34通过被设置在车内的扬声器34a而构成。另外,并不限定于此,也可以为取代扬声器34a或除了扬声器34a之外,而将车内的显示灯或显示器作为报知装置的结构。
[0046]
图3为,表示车辆控制装置20的功能结构的示例的框图。如图3所示的那样,车辆控制装置20具有位置取得部200、周边信息取得部210、车辆信息取得部220、行驶计划生成部230、操作受理部240、行驶控制部250、生物体信息取得部260、状态判断部270、报知部280、受理部290、通知部300。各功能结构通过cpu20a读取存储于rom20b中的执行程序并执行,从而被实现。
[0047]
位置取得部200具有取得车辆12的当前位置的功能。位置取得部200经由输入输出i/f20f而从gps装置22取得位置信息。
[0048]
作为取得部的周边信息取得部210具有取得车辆12的周边的周边信息的功能。周
边信息取得部210经由输入输出i/f20f而从外部传感器24取得车辆12的周边信息。在“周边信息”中,并不限于车辆12的周围的车辆、行人,还包括天气、亮度、行驶路的宽度、障碍物等。
[0049]
车辆信息取得部220具有取得车辆12的车速、加速度、横摆率等的车辆信息的功能。车辆信息取得部220经由输入输出i/f20f而从内部传感器26取得车辆12的车辆信息。
[0050]
行驶计划生成部230具有如下的功能,即,根据由位置取得部200所取得的位置信息、由周边信息取得部210所取得的周边信息、由车辆信息取得部220所取得的车辆信息,来生成用于使车辆12行驶的行驶计划。在行驶计划中,不仅包含到被预先设定的目的地为止的行驶路线,还包含用于避开车辆12前方的障碍物的行进路线、车辆12的速度等的信息。
[0051]
操作受理部240具有如下的功能,即,在实施基于车辆12的乘员的操作而进行的手动驾驶的情况下,受理从各输入装置28被输出的信号。操作受理部240生成车辆操作信息,车辆操作信息为,以从各输入装置28受理到的信号为基础而对作动器30进行控制的信息。
[0052]
行驶控制部250具有如下的功能,即,对基于由行驶计划生成部230生成的行驶计划而进行的自动驾驶、基于从远程操作装置16接收到的远程操作信息而进行的远程驾驶、以及基于从操作受理部240受理到的车辆操作信息而进行的手动驾驶进行控制的功能。
[0053]
生物体信息取得部260具有取得乘员的生物体信息的功能。生物体信息取得部260经由输入输出i/f20f而从生物体传感器32以及输入装置28取得乘员的生物体信息。另外,能够从生物体传感器32取得的生物体信息为,乘员的视线方向、脸的位置、表情、姿势、呼吸声、体温、心率、血压。此外,能够从输入装置28取得的生物体信息为,转向盘28a的转向力、对于加速踏板28b以及制动踏板28c的踏板踩踏力。生物体信息取得部260取得这些生物体信息中的至少一个。
[0054]
状态判断部270根据由生物体信息取得部260所取得的生物体信息,来对被预测为由乘员的操作实施的手动驾驶会变得困难的困难状态进行判断。在根据生物体信息来判断困难状态的情况下,例如通过对上述的各种生物体信息的参数设定阈值从而实施判断。即,状态判断部270在针对各种生物体信息而在预定的判断时间以上检测到大于等于困难状态的阈值的检测值时,判断为乘员处于困难状态。
[0055]
报知部280具有如下的功能,即,在根据从状态判断部270所取得的信息而判断为乘员处于困难状态的情况下,从报知装置34报知对乘员的安全与否进行确认的确认信息。如进行具体说明,则报知部280将作为通过通信i/f20e而从远程操作装置16接收到的确认信息的语音信息向扬声器34a输出。
[0056]
受理部290具有如下的功能,即,针对于由报知装置34输出的确认信息而受理来自乘员的响应。作为一个示例,响应被设为,在从报知装置34输出了确认信息起的预定的判断时间内,被输出到设置在车内的未图示的操作部上的操作信息。此外,响应也可以为,在从报知装置34输出了确认信息起的预定的判断时间内乘员向被设置在车内的未图示的收音话筒发出的语音信息。此外,响应还可以为,在远程驾驶人根据被远程操作装置16监视到的信息而判断为乘员能够响应的情况下,随着远程驾驶人的操作而从远程操作装置16被发送的信息。
[0057]
通知部300具有如下的功能,即,经由通信i/f20e而向远程操作装置16通知涉及困难状态的信息的功能。具体而言,在通过状态判断部270而判断出乘员处于困难状态的情况
下,通知部300向远程操作装置16通知涉及困难状态的信息。此外,通知部300在受理部290未受理到乘员的响应的情况下,向远程操作装置16通知将车辆12向远程驾驶进行切换的切换信息。
[0058]
(远程操作装置)
[0059]
图4为,表示搭载于本实施方式的远程操作装置16上的设备的硬件结构的框图。远程操作装置16除了包括上述的远程控制装置40之外,还包括显示装置42、扬声器44、输入装置48。
[0060]
远程控制装置40以包括cpu40a、rom40b、ram40c、存储器40d、通信i/f40e以及输入输出i/f40f的方式而被构成。cpu40a、rom40b、ram40c、存储器40d、通信i/f40e以及输入输出i/f40f经由总线40g而以能够相互通信的方式被连接。cpu40a、rom40b、ram40c、存储器40d、通信i/f40e以及输入输出i/f40f的功能与上述的车辆控制装置20的cpu20a、rom20b、ram20c、存储器20d、通信i/f20e以及输入输出i/f20f相同。cpu40a为第二处理器的一个示例,ram40c为第二存储器的一个示例。
[0061]
cpu40a从rom40b读取程序,并将ram40c作为工作区域而执行程序。在本实施方式中,在rom40b中存储有处理程序。通过cpu40a执行处理程序,从而远程控制装置40作为图5所示的行驶信息取得部400、操作信息生成部410、驾驶人决定部420、操作切换部430以及报知部440而发挥功能。
[0062]
在本实施方式的远程控制装置40上,经由输入输出i/f40f而连接有显示装置42、扬声器44、输入装置48、话筒50。另外,显示装置42、扬声器44、输入装置48以及话筒50也可以与总线40g直接连接。
[0063]
显示装置42为,用于使通过车辆12的摄像机24a而被拍摄到的图像、或涉及车辆12的各种信息进行显示的液晶监视器。
[0064]
扬声器44为,通过附属于车辆12的摄像机24a上的话筒(省略图示),从而对与拍摄图像一起被收录的声音进行播放的构件。此外,在作为其他报知装置的扬声器44中,在车辆12中判断为乘员处于异常状态的情况下,从车辆12通知的涉及困难状态的信息通过语音信息而被输出。该语音信息被设为警报、或在紧急时传达的讯息。
[0065]
输入装置48为,用于作为利用远程操作装置16的远程驾驶员的远程驾驶人进行操作的控制器。输入装置48包括作为使车辆12的转向轮转向的开关的转向盘48a、作为使车辆12加速的开关的加速踏板48b、作为使车辆12减速的开关的制动踏板48c。另外,各输入装置48的方式并不限于此。例如,也可以设置杠杆开关,以取代转向盘48a。此外,例如也可以设置按钮开关或杠杆开关,以取代加速踏板48b或制动踏板48c的踏板开关。
[0066]
话筒50为,用于经由输入输出i/f40f而将远程驾驶人发出的语音向远程操作装置16输入的语音输入装置。
[0067]
图5为,表示远程控制装置40的功能结构的示例的框图。如图5所示的那样,远程控制装置40具有行驶信息取得部400、操作信息生成部410、驾驶人决定部420以及操作切换部430、报知部440、通知部450。
[0068]
行驶信息取得部400具有取得从车辆控制装置20被发送的摄像机24a的拍摄图像和语音、以及车速等的车辆信息的功能。所取得的拍摄图像以及车辆信息被显示在显示装置42上,语音信息从扬声器44被输出。
[0069]
操作信息生成部410具有如下的功能,即,在实施基于远程驾驶人的操作而进行的远程驾驶的情况下,受理从各输入装置48被输出的信号。此外,操作信息生成部410以从各输入装置48受理到的信号为基础,而生成向车辆控制装置20发送的远程操作信息。
[0070]
驾驶人决定部420具有对操作远程操作装置16的远程驾驶人进行决定的功能。例如,在远程驾驶人存在多人的情况下,将一个远程驾驶人决定为实施操作的远程驾驶人。
[0071]
操作切换部430具有针对车辆控制装置20而执行向远程驾驶的切换的功能。在远程操作装置16中,在实施远程驾驶的远程驾驶人对未图示的操作部进行了操作的情况下,朝向车辆控制装置20而输出作为可操作信息的切换信号。例如,在从车辆12的车辆控制装置20已接收向远程驾驶的切换所涉及的切换信息的情况下,通过操作切换部430而将切换信号向车辆控制装置20输出,从而在车辆12中实施了从自动驾驶或手动驾驶向远程驾驶的切换。
[0072]
报知部440具有向远程驾驶人报知车辆12的乘员处于困难状态的情况的功能。如进行具体说明,则报知部440在经由通信i/f40e而接收到从车辆12被发送的涉及困难状态的信息的情况下,利用扬声器44而将涉及困难状态的语音信息输出。
[0073]
通知部450具有如下的功能,即,经由通信i/f40e而向车辆控制装置20通知对车辆12的乘员的安全与否进行确认的确认信息。具体而言,在接收到由车辆12发送的涉及困难状态的信息的情况下,将随着远程驾驶人的操作而被输入到远程操作装置16中的确认信息通知给车辆控制装置20。确认信息既可以为远程驾驶人朝向话筒50发出的呼叫的语音信息,也可以为被预先存储于远程操作装置16中的警报声或呼叫的消息声等的语音信息。
[0074]
(控制的流程)
[0075]
在本实施方式的车辆控制装置20中,在判断出乘员处于困难状态且将车辆12向远程驾驶进行切换时,利用图6的顺序图来对各装置之间的处理的流程进行说明。
[0076]
在图6的步骤s100中,在处于手动驾驶中的车辆12中,cpu20a从输入装置28以及生物体传感器32取得生物体信息。
[0077]
在步骤s101中,在车辆12中,cpu20a根据所取得的生物体信息,来对乘员是否处于困难状态进行判断。在判断为处于困难状态的情况下,进入步骤s102。另一方面,在判断为不处于困难状态的情况下,返回到步骤s100。
[0078]
在步骤s102中,在车辆12中,cpu20a向远程操作装置16通知乘员处于困难状态的情况。
[0079]
在步骤s103中,在远程操作装置16中,cpu40a向远程驾驶人报知乘员处于困难状态的情况。具体而言,cpu40a将涉及困难状态的语音信息向扬声器44输出,以向远程操作装置16的操作者进行报知。另外,受理到涉及困难状态的报知的操作者也可以为,与实际上负责车辆12的远程驾驶的远程驾驶人不同的人。例如,也可以为从多个远程驾驶人中选定对车辆12的驾驶进行交接的一个远程驾驶人的操作员。
[0080]
在步骤s104中,在远程操作装置16中,cpu40a将通过远程驾驶人而被输入的对乘员的安全与否进行确认的确认信息向远程操作装置16输入。
[0081]
在步骤s105中,在远程操作装置16中,cpu40a将确认信息通知给车辆控制装置20。
[0082]
在步骤s106中,在车辆12中,cpu20a将从远程操作装置16受理到的确认信息向报知装置34的扬声器34a输出。由此,cpu20a开始乘员的安全与否确认。
[0083]
在步骤s107中,在车辆12中,cpu20a对针对于输出到车内的确认信息而是否有来自乘员的响应进行判断。在判断为具有响应的情况下,结束处理。另一方面,在判断为没有响应的情况下,进入到步骤s108。
[0084]
在步骤s108中,在车辆12中,cpu20a将切换信息通知给远程操作装置16,其中,切换信息为表示将车辆12向远程驾驶进行切换的信息。
[0085]
此外,在步骤s109中,在车辆12中,cpu20a将车辆12从手动驾驶向自动驾驶进行切换。
[0086]
在步骤s110中,在远程操作装置16中,cpu40a选定能够进行车辆12的远程驾驶的一个远程驾驶人。
[0087]
在步骤s111中,在远程操作装置16中,cpu40a通知能够对车辆的12进行远程操作的可操作信息。
[0088]
在步骤s112中,cpu40随着远程驾驶人的操作而将操作信息向车辆控制装置20发送,并开始进行远程操作,且结束处理。
[0089]
在步骤s113中,在车辆12中,cpu20a接收从远程操作装置16被发送的操作信息,并将车辆12从自动驾驶向远程驾驶进行切换,且结束处理。
[0090]
(作用以及効果)
[0091]
以上,根据本实施方式的车辆控制装置20,能够执行自主地行驶的自动驾驶、和由操作装置而实施的远程驾驶。此外,车辆控制装置20在根据乘员的生物体信息而被预测为车辆的手动驾驶会变得困难的情况下,从报知装置34报知对乘员的安全与否进行确认的确认信息。此外,车辆控制装置20在未受理到来自被进行了安全与否的确认的乘员的响应的情况下,将向远程驾驶进行切换的切换信息通知给远程操作装置16。而且,车辆控制装置20在由远程操作装置16受理到切换信息之后从远程操作装置16受理到可操作信息的情况下,实施远程驾驶。由此,能够在对乘员的意向进行确认的基础上,将车辆12向远程驾驶进行切换。具体而言,在车辆12中由受理部受理到对于确认信息的响应的情况下,能够确认不需要向远程操作的切换这一乘员的意向。另一方面,在并未由受理部受理到响应的情况下,能够确认需要向远程操作的切换这一乘员的意向。
[0092]
此外,在本实施方式中,在从将向远程驾驶进行切换的切换信息通知给远程操作装置16起、到确保远程驾驶人为止的期间内,从手动驾驶向自动驾驶进行切换。由此,在乘员的异常时无法立即向远程操作进行切换的情况下,通过代替性地向自动驾驶进行切换,从而能够使车辆安全地行驶。
[0093]
此外,在本实施方式中,当在车辆控制装置20中判断出处于困难状态时,将涉及困难状态的信息通知给远程操作装置16。此外,为了确认乘员的安全与否,而从报知装置34输出针对于该通知而从远程操作装置16受理到的语音信息,以进行报知。由此,能够通过对远程操作装置16进行操作的远程驾驶人来对乘员的安全与否进行确认,并能够顺畅地向远程驾驶进行切换。此外,远程驾驶人能够在较早的阶段为远程驾驶做好准备。
[0094]
此外,在本实施方式的车辆控制系统10中,在通过远程驾驶人而被操作的远程操作装置16上设置有远程控制装置40。在接收到车辆的成员处于困难状态的信息时,该远程控制装置40能够向扬声器44输出涉及困难状态的信息。由此,该远程控制装置40能够向远程驾驶人报知成员处于困难状态的情况。其结果为,远程驾驶人能够迅速地执行紧急时的
应对。
[0095]
[第二实施方式]
[0096]
以下,使用图7来对本发明的第二实施方式进行说明。另外,对与前述的第一实施方式相同的结构部分标记相同符号并省略其说明。
[0097]
在第二实施方式中,在不从远程操作装置16接受对乘员的安全与否进行确认的确认信息的提供的条件下通过车辆控制装置20来对乘员的意向进行判断的这一点上,与第一实施方式有所不同。如进行具体说明,则在车辆控制装置20中,作为用于对乘员的安全与否进行确认的确认信息的语音信息被预先存储于存储器20d中。而且,车辆控制装置20在判断为乘员处于困难状态的情况下,将该确认信息向报知装置34输出。而且,在并未由受理部290而受理到乘员的响应的情况下,在通知部300中,将切换信息通知给远程操作装置16。
[0098]
在该第二实施方式中,由车辆控制装置20来执行交接处理,并在判断为乘员处于困难状态的情况下将车辆12向远程驾驶进行切换。以下,使用图7的流程图来对交接处理的流程进行说明。
[0099]
在步骤s120中,在手动驾驶中的车辆12中,cpu20a从输入装置28以及生物体传感器32取得生物体信息。
[0100]
在步骤s121中,cpu20a对乘员是否处于困难状态进行判断。在判断为处于困难状态的情况下,进入到步骤s122。另一方面,在判断为不处于困难状态的情况下,返回到步骤s120。
[0101]
在步骤s122中,cpu20a向车辆12的扬声器34a输出确认信息,并开始进行车内的乘员的安全与否确认。
[0102]
在步骤s123中,cpu20a使对预定的判断时间进行计测的计时器启动。
[0103]
在步骤s124中,cpu20a对针对于输出到车内的确认信息而是否具有来自乘员的响应进行判断。在判断为具有响应的情况下,结束处理。另一方面,在判断为没有响应的情况下,进入到步骤s125。
[0104]
在步骤s125中,cpu20a对是否经过了预定的判断时间进行判断。在判断为经过了判断时间的情况下,进入到步骤s126。另一方面,在判断为尚未经过判断时间的情况下,返回到步骤s124。
[0105]
在步骤s126中,cpu20a将切换信息通知给远程操作装置16,其中,切换信息为表示将车辆12向远程驾驶进行切换的信息。
[0106]
在步骤s127中,cpu20a对是否已确保了对远程操作装置16进行操作的远程驾驶人进行判断。具体而言,cpu20a在通过车辆控制装置20而受理到可操作信息的情况下,判断为已确保了远程驾驶人。另一方面,在并未受理到可操作信息的情况下,判断为尚未确保远程驾驶人。在判断为已确保了远程驾驶人的情况下,进入到步骤s128。另一方面,在判断为尚未确保远程驾驶人的情况下,进入到步骤s129。
[0107]
在步骤s128中,cpu20a将车辆12从手动驾驶向远程驾驶进行切换,并结束交接处理。
[0108]
另一方面,当cpu20a判断为尚未确保远程驾驶人并进入步骤s129时,cpu20a将车辆12从手动驾驶向自动驾驶进行切换。
[0109]
在步骤s130中,cpu20a再次对是否已确保了远程驾驶人进行判断。在判断为已确
only memory,只读光盘存储器)、dvd-rom(digital versatile disc read only memory,数字通用光盘只读存储器)、以及usb(universal serial bus,通用串行总线)存储器等的非临时性的存储介质中的方式被提供。此外,也可以采用各程序经由网络而从外部装置被下载的方式。
[0121]
上述实施方式中说明的处理的流程也为一个示例,也可以在不脱离主旨的范围内删除不必要的步骤、或追加新的步骤、或替换处理顺序。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips