
 商标分类
商标分类  商标转让
商标转让 
一种实时检测汽车行驶坡道坡度的方法与流程
 2021-02-03 16:02:32|
2021-02-03 16:02:32| 311|
311| 起点商标网
起点商标网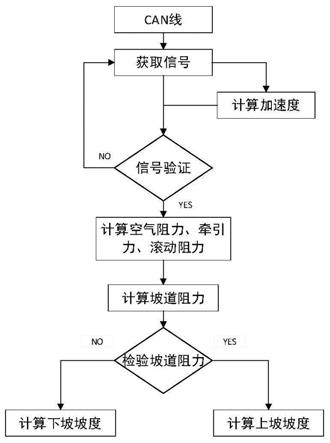
[0001]
本发明涉及车辆测量领域,具体涉及一种实时检测汽车行驶坡道坡度的方法。
背景技术:
[0002]
随着自动档汽车逐渐替代手动档成为汽车主流,检测坡道坡度成为汽车设计人员需要解决的一道难题。在高档汽车上,可以增加相关传感器直接对坡道坡度大小进行检测,但对于那些中低档的汽车,增加成本是很难接受的事情。
技术实现要素:
[0003]
本发明的目的在于,提供一种实时检测汽车行驶坡道坡度的方法,在不增加传感器的基础上,根据汽车现有传感器采集的信号,即可计算得到坡道坡度,不仅降低车辆成本,而且没有相关传感器使用时的各种限制。
[0004]
为解决上述技术问题,本发明的技术方案为:一种实时检测汽车行驶坡道坡度的方法,包括以下步骤:
[0005]
s1、获取车辆参数,所述车辆参数包括车轮半径、车身重量以及汽车的驱动方式;
[0006]
s2、获取环境参数,所述环境参数包括大气压强、温度、空气阻力系数、滚动阻力系数;
[0007]
s3、车辆上坡过程中每行驶一定距离采集一次车辆基础传感器的信号,所述信号包括速度信号、引擎扭矩力信号、换挡信号、刹车信号;
[0008]
s4、计算车辆上坡过程中的加速度;
[0009]
s5、判断信号是否符合合格标准,如不符合,则从s3重新开始执行;如符合,则继续执行;合格标准为预先通过人为设定;
[0010]
s6、计算车辆上坡过程中的空气阻力、牵引力、滚动阻力;
[0011]
s7、计算坡道阻力;
[0012]
s8、检验坡道阻力方向;
[0013]
s9、计算坡道坡度。
[0014]
进一步地,所述s4中计算加速度的方法为:根据s3中任意相邻两组信号中的速度之差除以两次采集信号时间之差,计算获取加速度。
[0015]
进一步地,所述s5具体为:进行判断的信号包括加速度信号、速度信号、引擎扭矩力信号、刹车信号、换挡信号;合格标准为:判断加速度小于1.56m/s
2
为合格;判断速度大于10km/h为合格;判断扭矩力大于0为合格;判断刹车信号显示不在刹车状态为合格;判断换挡信号显示不在换挡状态为合格;如以上信号任意一项不符合合格标准,则从s3重新开始执行;如以上信号均符合合格标准,则继续执行;
[0016]
进一步地,所述s6中计算空气阻力的方法为:车辆上坡过程中任意时刻的空气阻力等于空气阻力系数与该时刻车速平方的乘积。
[0017]
进一步地,所述s6中计算牵引力的方法为:车辆上坡过程中任意时刻的牵引力等
于该时刻引擎扭矩力与车轮半径大小的比值。
[0018]
进一步地,所述s6中计算滚动阻力的方法为:根据下列公式计算滚动阻力,
[0019][0020]
其中,f
rolling
为滚动阻力,m为车辆质量,g为重力加速度,f为滚动阻力系数,v为速度。
[0021]
进一步地,所述s7中计算坡道阻力的方法为:坡道阻力等于牵引力与滚动阻力、空气阻力、车辆质量与加速度乘积的差值。
[0022]
进一步地,所述s8中检验坡道阻力的方法为:根据计算得到坡道阻力的正负确定是上坡还是下坡,坡道阻力为正时,为上坡;坡道阻力为负时,为下坡。
[0023]
进一步地,所述s9中计算坡度的方法为:根据坡道阻力与车辆重力的比值得出坡道坡度的正弦值,查角度表获取坡道坡度。
[0024]
与现有技术相比,本发明的有益效果为:
[0025]
本发明在不增加传感器的基础上,根据汽车现有传感器采集的信号,即可计算得到坡道坡度,不仅降低车辆成本,而且没有相关传感器使用时的各种限制。
附图说明
[0026]
图1为本发明实施例的实现流程图。
具体实施方式
[0027]
下面结合附图对本发明实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0028]
本发明的技术方案为:一种实时检测汽车行驶坡道坡度的方法,如图1所示,包括以下步骤:
[0029]
s1、获取车辆参数,所述车辆参数包括车轮半径、车身重量以及汽车的驱动方式;
[0030]
s2、获取环境参数,所述环境参数包括大气压强、温度、空气阻力系数、滚动阻力系数;
[0031]
s3、车辆上坡过程中每行驶一定距离采集一次车辆基础传感器的信号,所述信号包括速度信号、引擎扭矩力信号、换挡信号、刹车信号;
[0032]
s4、计算车辆上坡过程中的加速度;
[0033]
s5、判断信号是否符合合格标准,如不符合,则从s3重新开始执行;如符合,则继续执行;合格标准为预先通过人为设定;
[0034]
s6、计算车辆上坡过程中的空气阻力、牵引力、滚动阻力;
[0035]
s7、计算坡道阻力;
[0036]
s8、检验坡道阻力方向;
[0037]
s9、计算坡道坡度。
[0038]
进一步地,所述s4中计算加速度的方法为:根据s3中任意相邻两组信号中的速度
之差除以两次采集信号时间之差,计算获取加速度。
[0039]
进一步地,所述s5具体为:进行判断的信号包括加速度信号、速度信号、引擎扭矩力信号、刹车信号、换挡信号;合格标准为:判断加速度小于1.56m/s
2
为合格;判断速度大于10km/h为合格;判断扭矩力大于0为合格;判断刹车信号显示不在刹车状态为合格;判断换挡信号显示不在换挡状态为合格;如以上信号任意一项不符合合格标准,则从s3重新开始执行;如以上信号均符合合格标准,则继续执行;
[0040]
进一步地,所述s6中计算空气阻力的方法为:车辆上坡过程中任意时刻的空气阻力等于空气阻力系数与该时刻车速平方的乘积,即
[0041]
f
air
=cd*v
2
[0042]
其中,cd为空气阻力系数,v为车速,f
air
为空气阻力。
[0043]
进一步地,所述s6中计算牵引力的方法为:车辆上坡过程中任意时刻的牵引力等于该时刻引擎扭矩力与车轮半径大小的比值,即
[0044][0045]
其中,t为引擎扭矩力,r为车轮半径,f
wheel
为牵引力。。
[0046]
进一步地,所述s6中计算滚动阻力的方法为:根据下列公式计算滚动阻力,
[0047][0048]
其中,f
rolling
为滚动阻力,m为车辆质量,g为重力加速度,f为滚动阻力系数,v为速度;在某些实际计算方法中,当v很小时,计算时会直接采取忽略v影响的算法,即此时车辆上坡过程中的滚动阻力等于车辆重力与滚动阻力系数的乘积。
[0049]
进一步地,所述s7中计算坡道阻力的方法为:坡道阻力等于牵引力与滚动阻力、空气阻力、车辆质量与加速度乘积的差值,即
[0050]
f=f
wheel-f
rolling-f
air-m*a
[0051]
其中,f
air
为空气阻力,f
wheel
为牵引力,f
rolling
为滚动阻力,m为车身重量,a为加速度,f为坡道阻力。
[0052]
进一步地,所述s8中检验坡道阻力的方法为:根据计算得到坡道阻力的正负确定是上坡还是下坡,坡道阻力为正时,为上坡;坡道阻力为负时,为下坡。
[0053]
进一步地,所述s9中计算坡度的方法为:根据坡道阻力与车辆重力的比值得出坡道坡度的正弦值,查角度表获取坡道坡度。
[0054]
本发明在不增加传感器的基础上,根据汽车现有传感器采集的信号,即可计算得到坡道坡度,不仅降低车辆成本,而且没有相关传感器使用时的各种限制。
[0055]
以上的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围做出限定,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips