
 商标分类
商标分类  商标转让
商标转让 
电动制动装置和车辆的制作方法
 2021-02-03 16:02:20|
2021-02-03 16:02:20| 505|
505| 起点商标网
起点商标网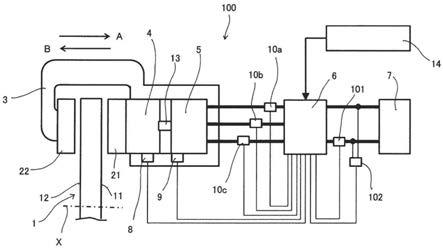
[0001]
本申请涉及电动制动装置和车辆。
背景技术:
[0002]
作为汽车等车辆的制动装置,以往使用油压制动装置,但是近年来,作为油压制动装置的替代手段,通过驱动电动机来产生制动力的电动制动装置的开发正不断推进。众所周知,车辆的制动装置承担着车辆中的重要功能,并需要具备用于即使在制动装置中产生故障或异常的情况下、也使车辆正常地行驶或停止的系统。
[0003]
在电动制动装置的情况下,如果在车辆的减速中电动制动装置中产生故障,则刹车片有可能会在被按压至盘式转子的状态下被固定、即发生所谓的制动粘着。如果发生制动粘着,则电动制动装置变得无法控制车辆的制动,可能发生不期望的紧急制动或者车辆旋转等。
[0004]
在专利文献1中,公开了通过驱动电动机来产生停车中的车辆的停车制动力的电动停车制动装置。专利文献1中所公开的电动停车制动装置被构成为,即使在电动停车制动装置中检测出故障的情况下也判定为能够解除停车制动时,车辆的乘客在对操作构件进行操作从而解除了停车制动后,禁止电动停车制动装置的动作。现有技术文献专利文献
[0005]
专利文献1:日本专利第4507831号公报
技术实现要素:
发明所要解决的技术问题
[0006]
专利文献1中所公开的电动停车制动装置在电动停车制动装置中发生了故障时,由于如前述那样地禁止进行动作,因而不会陷入制动粘着的状态,此外,由于仅在车辆的乘客进行了解除停车制动的操作时才解除停车制动,因而防止制动粘着的发生。另外,如果是电动停车制动装置,则在车辆基本上停止时,车辆的乘客进行停车制动的操作或停车制动解除的操作,因而不会发生前述的紧急制动或者车辆旋转等。
[0007]
然而,在产生用于使车辆减速或停止的制动力的电动制动装置中,与前述的电动停车制动装置不同,可能在车辆的行驶中发生故障或异常,从而,若在车辆的减速中发生故障或异常并变为制动粘着的状态,则变得无法控制针对行驶的车辆的制动。
[0008]
本申请公开了用于解决电动制动装置中的前述那样的问题的技术,目的在于提供一种即使在电动制动装置的结构要素中的至少一个发生了故障或异常时、也可以正常地使车辆行驶或停止的电动制动装置。
[0009]
此外,本申请的目的在于,提供一种即使在电动制动装置的结构要素中的至少一个发生了故障或异常时、也可以正常地行驶或停止的车辆。解决技术问题所采用的技术方案
[0010]
本申请所公开的电动制动装置将如下项作为结构要素:盘式转子,该盘式转子与车辆的车轮轴一起旋转;刹车片,该刹车片通过被按压至所述盘式转子,从而产生针对所述车辆的制动力;活塞,该活塞驱动所述刹车片,以使得将所述刹车片按压至所述盘式转子,或者将所述刹车片拉离所述盘式转子;电动机,该电动机驱动所述活塞;功率转换器,该功率转换器进行所述电动机与电源之间的功率转换;以及控制器单元,该控制器单元控制所述功率转换器以驱动所述电动机,所述控制器单元的特征在于,构成为:在所述结构要素中的至少一个发生了故障或异常时,驱动所述电动机,以使得将所述刹车片拉离所述盘式转子。
[0011]
此外,本申请所公开的电动制动装置将如下项作为结构要素:盘式转子,该盘式转子与车辆的车轮轴一起旋转;刹车片,该刹车片通过被按压至所述盘式转子,从而产生针对所述车辆的制动力;活塞,该活塞驱动所述刹车片,以使得将所述刹车片按压至所述盘式转子,或者将所述刹车片拉离所述盘式转子;电动机,该电动机驱动所述活塞;功率转换器,该功率转换器进行所述电动机与电源之间的功率转换;以及控制器单元,该控制器单元控制所述功率转换器以驱动所述电动机,所述控制器单元的特征在于,构成为:在所述结构要素中的至少一个发生了故障或异常时,驱动所述电动机,以使得将所述刹车片拉离所述盘式转子,使得所述刹车片与所述盘式转子之间的间隔成为预先确定的值以上。
[0012]
另外,本申请所公开的电动制动装置将如下项作为结构要素:盘式转子,该盘式转子与车辆的车轮轴一起旋转;刹车片,该刹车片通过被按压至所述盘式转子,从而产生针对所述车辆的制动力;活塞,该活塞驱动所述刹车片,以使得将所述刹车片按压至所述盘式转子,或者将所述刹车片拉离所述盘式转子;电动机,该电动机驱动所述活塞;功率转换器,该功率转换器进行所述电动机与电源之间的功率转换;以及控制器单元,该控制器单元控制所述功率转换器以驱动所述电动机,所述控制器单元的特征在于,构成为:在所述结构要素中的至少一个发生了故障或异常时,驱动所述电动机,以使得将所述刹车片拉离所述盘式转子,使得所述刹车片与所述盘式转子之间的间隔成为预先确定的范围内的值。
[0013]
此外,本申请所公开的车辆是具有多个车轮的车辆,其特征在于,所述多个车轮中的至少一个车轮具备上述电动制动装置中的任一个,并构成为,在所述电动制动装置中发生了故障或异常时,仅对于发生了所述故障或异常的电动制动装置,将所述刹车片拉离所述盘式转子。
发明效果
[0014]
根据本发明所公开的电动制动装置,可以实现如下的电动制动装置:即使在电动制动装置的结构要素中的至少一个产生了故障或异常时,也可以正常地使车辆行驶或停止。
[0015]
此外,根据本申请所公开的车辆,可以实现如下的车辆:即使在电动制动装置的结构要素中的至少一个发生了故障或异常时,也可以正常地行驶或停止。
附图说明
[0016]
图1是示出根据实施方式1、实施方式2及实施方式3的电动制动装置的整体结构的概要图。图2是示出根据实施方式1的电动制动装置中的控制器单元的结构的框图。图3是示出根据实施方式1的电动制动装置中的控制器单元的动作的流程图。图4是示出根据实施方式2的电动制动装置中的控制器单元的结构的框图。图5是示出根据实施方式2的电动制动装置中的控制器单元的动作的流程图。图6是示出根据实施方式2的电动制动装置中的电动活塞的位置与按压力之间的关系的一个示例的特性图。图7是示出根据实施方式3的电动制动装置中的控制器单元的结构的框图。图8是示出根据实施方式3的电动制动装置中的控制器单元的动作的流程图。图9是示出图2、图4及图7所示的控制器单元的硬件结构的框图。
具体实施方式
[0017]
以下,参照附图,对根据本申请的实施方式1至3的电动制动装置及车辆进行说明。另外,在各附图中,相同标号表示相同部分或相当部分。
[0018]
实施方式1.图1是示出根据实施方式1、实施方式2及实施方式3的电动制动装置的整体结构的概要图。在图1中,电动制动装置100如图1所示,具备与车辆(未图示)的车轮轴(未图示)一起以中心轴x作为中心进行旋转的盘式转子1。盘式转子1的一个轴方向的端面即第1面11与第1刹车片21的一个端面相对,盘式转子1的另一个轴方向的端面即第2面12与第2刹车片22的一个端面相对。如在下文所叙述的那样,对于盘式转子1,在第1面11的一部分被第1刹车片21的一个端面按压、同时第2面12的一部分被第2刹车片22的一个端面按压时,利用盘式转子1的第1面11与第1刹车片21之间所产生的摩擦力、以及盘式转子1的第2面12与第2刹车盘22之间所产生的摩擦力,来产生对于车辆的制动力,从而使得车辆减速或停止。
[0019]
制动钳3例如是浮动式制动钳,以可在图1所示的箭头a的方向和箭头b的方向上自由移动的方式由车辆的车体支承。在制动钳3上,固定有具备驱动轴13的电动机5。此外,在制动钳3上设置有通过被电动机5驱动而在箭头a的方向或箭头b的方向上移动的电动活塞4。第1刹车片21的另一个端面被固定到电动活塞4的轴方向的一个端部。第1刹车片21随着电动活塞4向箭头a的方向或箭头b的方向的移动,在与电动活塞4的移动方向相同的方向上移动。第2刹车片22的另一个端面被固定到制动钳3。第2刹车片22随着制动钳3向箭头a的方向或箭头b的方向的移动,在与制动钳3的移动方向相同的方向上移动。
[0020]
电动活塞4的轴方向的另一个端部连结到电动机5的驱动轴13。电动活塞4与驱动轴13之间的连结例如被构成为通过使设置在电动活塞4上的内螺纹与设置在电动机5的驱动轴13上的外螺纹啮合来进行,基于该啮合,将驱动轴13的旋转转换为电动活塞4的轴方向的移动。另外,也可被构成为通过电动机5的旋转来使驱动轴13在轴方向移动。
[0021]
电动制动装置100进一步具备控制器单元6以及电源7。控制器单元6被构成为,在向电动机5提供功率的同时,控制电动机5的旋转方向、旋转速度、转矩等电动机5的动作。在下文叙述控制器单元6的详细情况。电源7例如由铅电池、镍氢电池、锂离子电池、电容器等构成,在与控制器单元6之间交换功率。电动机5通过从控制器单元6被提供功率,来进行正向旋转或反向旋转。
[0022]
作为电动制动装置100的动作的一个示例,若电动机5正向旋转,则电动活塞4在箭头b的方向上移动,被固定在电动活塞4的轴方向的一个端部处的第1刹车片21被按压至盘式转子1的第1面11的一部分,与此同时,因该按压压力的反作用力而使得制动钳3在箭头a的方向上移动,第2刹车片22被按压至盘式转子1的第2面12的一部分。通过该动作,电动制动装置100产生对于车辆的制动力,使车辆减速或者停止。
[0023]
此外,若电动机5和驱动轴13反向旋转,则电动活塞4在箭头a的方向上移动,利用其反作用力而使得制动钳3在箭头b的方向上移动,一对刹车片即第1刹车片21和第2刹车片22被拉离盘式转子1。通过该动作,电动制动装置100释放对于车辆的制动力。
[0024]
电动制动装置100进一步具备作为制动力传递单元的制动单元14。制动单元14被构成为,将车辆的减速或停止所需的作为制动力的目标值的目标制动力、或者作为将第1刹车片21与第2刹车片22按压至盘式转子1的按压力的目标值的目标按压力传递至控制器单元6。
[0025]
控制器单元6基于从制动单元14传递来的目标制动力或目标按压力,来将用于驱动电动机5的功率供电到电动机5。电动机5利用从控制器单元6供电的功率来如前述那样进行正向旋转或反向旋转,并进行动作,以使得将第1刹车片21和第2刹车片22按压至盘式转子1,或者使第1刹车片21和第2刹车片22远离盘式转子1。
[0026]
控制器单元6具备进行电源7与电动机5之间的功率转换的功率转换器(未图示)。功率转换器具备由例如多个半导体开关元件所构成的三相电桥电路,将从电源7提供的直流功率转换为三相交流功率并提供到电动机5,或将由电动机5的旋转而产生的三相交流功率转换为直流功率并提供到电源7。构成功率转换器的多个半导体开关元件基于来自制动单元14的目标制动力或目标按压力,例如通过pwm(pulse width modulation:脉冲宽度调制)控制来进行开关控制。另外,功率转换器也可以被设置成与控制器单元6相分离。
[0027]
电动活塞4上搭载有作为对第1刹车片21和第2刹车片22相对于盘式转子1的按压力进行检测的载重检测单元的载重传感器8,由载重传感器8所检测出的载重信号被输入到控制器单元6。电动机5上设置有作为对电动机5的转子的旋转角、即驱动轴13的旋转角进行检测的旋转角检测单元的旋转角传感器9,由旋转角传感器9所检测出的旋转角信号被输入到控制器单元6。
[0028]
此外,在电动机5与控制器单元6之间的功率交换用的三相各相的三相连接导体上设置有作为对电动机电流进行检测的电动机电流检测单元的电动机电流传感器10a、10b、10c,由电动机电流传感器10a、10b、10c所检测出的电动机电流信号被输入到控制器单元6。
另外,电动机电流传感器10a例如检测三相电流中的u相电流,电动机电流传感器10b例如检测三相电流中的v相电流,电动机电流传感器10c例如检测三相电流中的w相电流。控制器单元6例如被构成为,基于从旋转角传感器9输入的旋转角信号、和从电动机电流传感器10a、10b、10c输入的电动机电流信号,来对电动机5进行反馈控制。
[0029]
另外,在电源7与控制器单元6之间的直流连接导体上设置有作为对电源7的电压进行检测的电源电压检测单元的电源电压传感器102、和作为对在电源7与控制器单元6之间流动的电流进行检测的电源电流检测单元的电源电流传感器101,由电源电压传感器102所检测出的电源电压信号和由电源电流传感器101所检测出的电源电流信号分别被输入至控制器单元6。
[0030]
接着,进一步地对控制器单元6进行详细说明。图2是示出根据实施方式1的电动制动装置中的控制器单元的结构的框图。在图2中,如前述那样,控制器单元6被构成为,在向电动机5提供功率的同时,控制电动机5的旋转方向、旋转速度、转矩等电动机5的动作,并且具备前述的功率转换器(未图示)和电子控制装置ecu(electronic control unit:电子控制单元)。在图2中,为了避免复杂化,省略了功率转换器,仅示出ecu作为控制器单元6。在以下的说明中,为了说明的方便,有时也会将ecu作为控制器单元6来进行说明。
[0031]
控制器单元6具备电动机驱动单元6a。电动机驱动单元6a例如基于从外部的制动单元14输入的目标按压力信号a、从旋转角传感器9输入的旋转角信号b、从电动机电流传感器10a、10b、10c输入的电动机电流信号c、从载重传感器8输入的载重信号d、从电源电压传感器102输入的电源电压信号e、和从电源电流传感器101输入的电源电流信号f中的至少一个信号,来输出用于对电动机5的旋转方向、旋转速度、和转矩进行控制的电动机驱动信号g。
[0032]
从电动机驱动单元6a输出的电动机驱动信号g被输入到对功率转换器的多个半导体开关元件的开关进行控制的驱动电路(未图示)。驱动电路基于被输入的驱动信号g,来对各半导体开关元件进行开关控制,并且控制从功率转换器提供到电动机5的三相交流功率。
[0033]
此外,控制器单元6具备故障判定单元6b。故障判定单元6b基于从载重传感器8输入的载重信号d、从旋转角传感器9输入的旋转角信号b、从电源电流传感器101输入的电源电流信号f、从电源电压传感器102输入的电源电压信号e、从电动机电流传感器10a、10b、10c输入的电动机电流信号c、和从制动单元14输入的例如目标按压力信号a,来判定电动制动装置100的结构要素有无故障、和载重传感器8、旋转角传感器9、电源电流传感器101、电源电压传感器102、电动机电流传感器10a、10b、10c、制动单元14有无故障,生成故障判定信号h并输入到电动机驱动单元6a。
[0034]
这里,在实施方式1中,作为对有无故障进行判定的电动制动装置100的结构要素,例如将电动活塞4、电动机5、驱动轴13、作为控制器单元6的功率转换器和ecu、将控制器单元6与电动机5之间相连接的三相连接导体及它们的连接构件、电源7、将电源7与控制器单元6之间相连接的直流连接导体及它们的连接构件、制动单元14作为对象。
[0035]
电动机驱动单元6a被构成为,根据与来自故障判定单元6b的故障判定信号h所具有的故障相关的信息、即前述的电动制动装置100的前述的结构要素、各传感器、和制动单元14有无故障,来如在后文中叙述那样地变更电动机5的驱动方法并驱动电动机5。
[0036]
接着,对控制器单元6的动作进行说明。图3是示出根据实施方式1的电动制动装置
中的控制器单元的动作的流程图。在图3中,控制器单元6首先在步骤s301中,例如如图2的框图所示那样地,输入从外部的制动单元14输出的目标按压力信号a、从旋转角传感器9输出的旋转角信号b、从电动机电流传感器10a、10b、10c输出的电动机电流信号c、从载重传感器8输出的载重信号d、从电源电压传感器102输出的电源电压信号e、和从电源电流传感器101输出的电源电流信号f。
[0037]
另外,在以下的说明中,为了说明的方便,有时将旋转角传感器9、电动机电流传感器10a、10b、10c、载重传感器8、电源电压传感器102、以及电源电流传感器101统称为各种传感器。
[0038]
在步骤s302中,基于在步骤s301中所输入的来自各种传感器和制动单元14的信息,来判定电动制动装置100的前述的结构要素和各种传感器是否未发生故障。作为电动制动装置100的结构要素和各种传感器的故障判定的一个示例,例如如果在根据来自载重传感器8的载重信号d进行故障判定的情况下,由于即便使电动机5正向旋转,从载重传感器8输入的载重信号d也不变化,或者载重信号d的值被固定为最大值或者最小值从而也不变化等,因而能检测出作为电动制动装置100的结构要素的电动活塞4的故障、和载重传感器8其本身的故障、或将载重传感器8与控制器单元6相连接的线束的断线、电源短路或接地短路等故障、还有连接线束的各连接器的连接不良等,从而进行故障的判定。对于电动制动装置的其他结构要素、以及其他传感器,也能以同样的方法来进行对它们有无故障的判定。
[0039]
接着,在步骤s303中,判断步骤s302中的电动制动装置100的结构要素和各种传感器的故障判定的结果。当在步骤s303中确认了步骤s302中被判定为电动制动装置100的结构要素和各种传感器中的任一者中都没有发生故障这一情况时(“否”),前进到步骤s305,输出电动机驱动信号g以使电动机进行通常动作。这里,所谓电动机5的通常动作,是指电动机5进行动作,以使得第1刹车片21和第2刹车片22相对于盘式转子1的按压力与基于来自制动单元14的目标按压力信号a的目标按压力相一致。电动机5通过通常动作,从而产生所要求的旋转方向、旋转速度、以及转矩。
[0040]
另一方面,当在步骤s303中确认了在步骤s302中被判定为电动制动装置100的结构要素和各种传感器中的至少一者发生故障这一情况时(“是”),前进到步骤s304。在步骤s304中,判定是否从故障判定起经过了预先确定的时间,在判定为未经过预先确定的时间的情况下(“否”),前进至步骤s306,为了将第1刹车片21和第2刹车片22拉离盘式转子1,将电动机驱动信号g输出至功率转换器的驱动电路(未图示),以使电动机5反向旋转。这里,所谓预先确定的时间,是指作为为了将第1刹车片21和第2刹车片22拉离盘式转子1从而不发生制动粘着所需要的时间而被设定的时间。
[0041]
当在步骤s304中判定为从故障判定起经过了预先确定的时间以上的情况下(“是”),判断为第1刹车片21和第2刹车片22已被充分地拉离盘式转子1,前进至步骤s307。在步骤s307中,使电动机5停止。
[0042]
如以上那样地,根据实施方式1,即使在电动制动装置的结构要素、和各种传感器发生了故障的情况下,也并非立即停止电动机从而使得电动制动装置不进行动作,而是通过由控制器单元实施对电动机的控制,以使得在使电动机进行反向旋转以将盘式转子和刹车片拉离之后停止电动机,从而可以避免制动粘着。即,即使在车辆的行驶中、特别地在车辆减速中电动制动装置的结构要素发生了故障,也不会变得无法控制车辆的制动,而是能
够利用例如其他车轮上所搭载的制动装置,来使得车辆正常行驶或停止。
[0043]
此外,根据实施方式1的车辆被构成为,具有多个车轮,在这些多个车轮中的至少一个中具备前述的电动制动装置,在该电动制动装置的结构要素中的至少一个中发生了故障时,仅针对发生了故障的电动制动装置,将刹车片拉离盘式转子。因此,即使在电动制动装置的结构要素、和各种传感器发生了故障的情况下,也并非立即停止电动机从而使得电动制动装置不进行动作,而是通过由控制器单元实施对电动机的控制,以使得在使电动机进行反向旋转以将盘式转子和刹车片拉离之后停止电动机,从而可以避免制动粘着。即,即使在车辆的行驶中、特别地在车辆减速中电动制动装置的结构要素中发生了故障,也不会变得无法控制车辆的制动,而是能利用例如其他车轮上所搭载的制动装置,来使车辆正常行驶或停止。
[0044]
另外,在实施方式1中,虽然基于来自各种传感器和制动单元的输入信号来实施故障判定,但是也可以设为接收来自各种传感器及制动单元的失败(failure)信号,以进行故障判定。在该情况下,这些失败信号也可以作为模拟信号或者数字信号被接收,也能够通过其他通信来接收。
[0045]
实施方式2根据实施方式2的电动制动装置的整体结构如前述的图1所示的那样。在实施方式2中,控制器单元的结构和动作与实施方式1中的控制器单元不同。在针对实施方式2的以下的说明中,以控制器单元的结构和动作为中心来进行详细说明。
[0046]
图4是示出根据实施方式2的电动制动装置中的控制器单元的结构的框图。在图4中,控制器单元6具备电动机驱动单元6c。电动机驱动单元6c例如基于从制动单元14输入的目标按压力信号a、从旋转角传感器9输入的旋转角信号b、从电动机电流传感器10a、10b、10c输入的电动机电流信号c、从载重传感器8输入的载重信号d、从电源电压传感器102输入的电源电压信号e、和从电源电流传感器101输入的电源电流信号f中的至少一个信号,来输出用于对电动机5的旋转方向、旋转速度、和转矩进行控制的电动机驱动信号g。
[0047]
从电动机驱动单元6c输出的电动机驱动信号g被输入到对功率转换器的多个半导体开关元件进行开关控制的驱动电路(未图示)。驱动电路通过基于被输入的驱动信号g,来对功率转换器的多个半导体开关元件进行开关控制,从而控制从功率转换器提供到电动机5的功率。
[0048]
此外,控制器单元6设置有异常判定单元6d。异常判定单元6d基于从载重传感器8输入的载重信号d、从旋转角传感器9输入的旋转角信号b、从电源电流传感器101输入的电源电流信号f、从电源电压传感器102输入的电源电压信号e、从电动机电流传感器10a、10b、10c输入的电动机电流信号c、和从制动单元14输入的例如目标按压力信号a,来判定电动制动装置100的结构要素、载重传感器8、旋转角传感器9、旋转角传感器9、电源电流传感器101、电源电压传感器102、电动机电流传感器10a、10b、10c、以及制动单元14有无故障,输出异常判定信号j。
[0049]
另外,控制器单元6具备电动机驱动可否判定单元6e。从异常判定单元6d将异常判定信号j输入电动机驱动可否判定单元6e,电动机驱动可否判定单元6e根据该异常判定信号j的信息,来判定是否能够驱动电动机5,并输出驱动可否判定信号k。电动机驱动单元6c被构成为,被输入有来自异常判定单元6d的异常判定信号j、和来自电动机驱动可否判定单
元6e的电动机驱动可否判定信号k,根据前述的电动制动装置100的结构要素和各传感器有无异常,来变更电动机5的驱动方法。
[0050]
接着,对控制器单元6的动作进行说明。图5是示出根据实施方式2的电动制动装置中的控制器单元的动作的流程图。在图5中,控制器单元6首先在步骤s501中,例如如图4的框图所示那样地,输入从制动单元14输出的目标按压力信号a、从旋转角传感器9输出的旋转角信号b、从电动机电流传感器10a、10b、10c输出的电动机电流信号c、从载重传感器8输出的载重信号d、从电源电压传感器102输出的电源电压信号e、和从电源电流传感器101输出的电源电流信号f。
[0051]
在步骤s502中,基于来自各种传感器的信息,判定电动制动装置100的前述的结构要素、各种传感器中是否未发生异常、以及控制器单元6中的功率转换器(未图示)是否未输入输出异常的电压或电流。这里,作为异常判定单元6d的异常判定的一个示例,例如,如果在电源电压传感器102的情况下,在从电源电压传感器102输入的电源电压信号e为偏离了预先确定的范围的值时,判定为作为电动制动装置100的结构要素的电源7、或电源7与控制器单元6之间的直流导体、或电源电压传感器102是异常的,在电源电压信号e为包含于预先确定的范围内的值时,判定为作为电动制动装置100的结构要素的电源7、以及电源7与控制器单元6之间的直流导体、以及电源电压传感器102是正常的。对于其他传感器,也能同样地判定有无异常。
[0052]
另外,虽然未图示,但制动单元14、旋转角传感器9、电动机电流传感器10a、10b、10c、载重传感器8、电源电压传感器102、电源电流传感器101、和控制器单元6通过通信线连接,关于利用该通信线进行的通信是否存在异常,也可以设为通过异常判定单元6d来判定。
[0053]
此外,虽然未图示,但前述的各种传感器的信号也可以设为通过低通滤波器等模拟输入电路来输入至异常判定单元6d,在该情况下,关于与各种传感器相对应的模拟输入电路中是否存在异常,也可以设为通过异常判定单元6d来进行异常判定。另外,对于并非通过基于数字信号的无线通信、而是利用模拟信号经由输入电路来输入来自制动单元14的目标按压力信号a的情况,也是同样的。
[0054]
接着,在步骤s503中,对在步骤s502中是否被判定为电动制动装置100的结构要素和各种传感器为异常进行确认。当在步骤s503中确认了步骤s502中被判定为电动制动装置100的结构要素和各种传感器中的任一者中都没有发生异常这一情况时(“否”),前进到步骤s506,输出电动机驱动信号g以使电动机5进行通常动作。这里,所谓电动机5的通常动作,是指电动机5进行动作,以使得第1刹车片21和第2刹车片22相对于盘式转子1的按压力与基于来自制动单元14的目标按压力信号a的目标按压力相一致。电动机5通过通常动作,从而产生所要求的旋转方向、旋转速度、以及转矩。
[0055]
另一方面,当在步骤s503中确认了在步骤s502中被判定为电动制动装置100的结构要素或者各种传感器中的至少一者发生故障这一情况时(“是”),前进到步骤s504。在步骤s504中,基于在步骤s502中的异常判定的结果,由电动机驱动可否判定单元6e来判定是否能够驱动电动机5。例如,即使在来自载重传感器8的载重信号d发生异常的情况下,如果来自电动机电流传感器10a、10b、10c的电动机电流信号c、和来自旋转角传感器9的旋转角信号b是正常的,则也能控制电动机5,因而,如果异常判定是仅根据来自载重传感器8的载重信号d的异常来进行的异常判定,则在步骤s504中,判定为能够驱动电动机5。此时,电动
机驱动可否判定单元6e将驱动可否判定信号k作为能够驱动的信号而输入到电动机驱动单元6c。
[0056]
此外,即使在来自旋转角传感器9的旋转角信号b为异常的情况下,能够通过实施无旋转角传感器驱动从而驱动电动机5,即使在来自电动机电流传感器10a、10b、10c的电动机电流信号为异常的情况下,能够通过实施无电流传感器驱动从而驱动电动机5,因而,在步骤s504中,也可以判定为能够驱动电动机5。另外,即使在电源电压、电源电流、或电动机电流偏离预先确定的范围从而得到异常判定的情况下,如果是用于进行保护以避免控制器单元6和电动机5发生故障的异常判定,则由于不是立即变成无法驱动电动机5的状态,因而能判定为能够驱动电动机5。
[0057]
另一方面,在步骤s504中,在判定为不能驱动电动机5的情况下(“否”),前进到步骤s508,停止电动机5。在步骤s504中,在如前述那样判定为能够驱动电动机的情况下(“是”),前进到步骤s505。
[0058]
在步骤s505中,判定盘式转子1的第1面11与第1刹车片21之间的间隔、以及盘式转子1的第2面12与第2刹车片22之间的间隔是否在预先确定的值以上。这里,所谓预先确定的间隔的值,是指为了避免制动粘着而被设定为足够的间隔的值、或被设定为用于使刹车片不会因摩擦而变得过热的足够的间隔的值。
[0059]
盘式转子1的第1面11与第1刹车片21之间的间隔、以及盘式转子1的第2面12与第2刹车片22之间的间隔可以直接通过传感器来测量,但例如也可以设为根据表示电动活塞4的位置与按压力之间的关系的特性图、和基于来自旋转角传感器9的旋转角信号b的驱动轴13的旋转角的信息,来推定前述的间隔。图6是示出根据实施方式2的电动制动装置中的电动活塞的位置与按压力之间的关系的一个示例的特性图,横轴表示电动活塞4的位置,纵轴表示第1刹车片21和第2刹车片22相对于盘式转子1的按压力。
[0060]
另外,图6虽然用将开始产生按压力的电动活塞的位置设为“0”的线性图表来进行表示,但根据电动机的特性、电动活塞的构造、在虽未图示但在电动机与电动活塞之间存在减速齿轮的情况下该减速齿轮的构造及特性、或刹车片与制动钳的构造,图6的特性会发生变化。图6所示的特性为一个示例。
[0061]
盘式转子1的第1面11与第1刹车片21之间的间隔、和盘式转子1的第2面12与第2刹车片22之间的间隔,可根据图6中从按压力为“0”的状态起到电动机5的驱动轴13以正向旋转或反向旋转的方式进行旋转后的值,来进行推定。该推定方法可以在来自旋转角传感器9的旋转角信号b为正常的情况下使用。例如,当电源电压信号e异常、或电源电流信号f异常等除了旋转角信号b以外的信号异常的情况下,能够使用通过前述的推定方法来推定得到的间隔,对电动机5进行驱动,以使得将盘式转子1与第1刹车片21及第2刹车片22之间的间隔设成预先确定的值以上。
[0062]
另外,虽然未图示,但是在来自旋转角传感器9的旋转角信号b为异常的情况下,通过利用无角度传感器驱动来驱动电动机5,变为按压力为“0”的状态,从而能判定为盘式转子1的第1面11与第1刹车片21之间的间隔、和盘式转子1的第2面12与第2刹车片22之间的间隔在预先确定的值以上。
[0063]
在步骤s505中,在判定为盘式转子1的第1面11与第1刹车片21之间的间隔、和盘式转子1的第2面12与第2刹车片22之间的间隔低于预先确定的值的情况下(“否”),前进到步
骤s507,为了将第1刹车片21和第2刹车片22拉离盘式转子1,输出用于使电动机5进行反向旋转的电动机驱动信号g。
[0064]
在步骤s505中,在判定为盘式转子1的第1面11与第1刹车片21之间的间隔、和盘式转子1的第2面12与第2刹车片22之间的间隔在预先确定的值以上的情况下(“是”),判定为盘式转子和刹车片被充分拉离,前进到步骤s508,使电动机5停止。在此基础上,关于电动制动装置100的结构要素或各种传感器发生异常时的电动机的驱动,也可设为限制电动机5的驱动方法,例如,将电动机5的转速设成预先确定的值以下,或者将电动机5的转矩(电流)设成预先确定的值以下等。在该情况下,电动机5的转速或电动机5的转矩(电流)的预先确定的值分别优选为被设定成不破坏电动机5或电动制动装置100的结构要素。
[0065]
如以上那样地,即使在电动制动装置100的结构要素、或各种传感器、即旋转角传感器9、电动机电流传感器10a、10b、10c、载重传感器8、电源电压传感器102、和电源电流传感器101中的任一者为异常的情况下,在能驱动电动机5的情况下,也并非立即停止电动机5从而使得电动制动装置100不进行动作,而是通过由控制器单元6实施对电动机5的控制,以使得电动机5进行反向旋转以将盘式转子1与第1刹车片21及第2刹车片22之间的间隔拉离至预先确定的值以上,然后停止电动机5,从而也可以避免制动粘着。因此,即使在车辆的行驶中、特别地在车辆减速中电动制动装置100的结构要素发生了故障,也不会发生变得无法控制车辆的制动这样的情形,而是能利用其他车轮上搭载的制动装置,来使车辆正常行驶或停止。
[0066]
另外,在实施方式2中,虽然驱动电动机以使得盘式转子与刹车片之间的间隔为预先确定的值以上,但即使设为进行控制以使盘式转子与刹车片之间的间隔在预先确定的范围内,也可得到相同的效果。在该情况下,由于可以使得盘式转子与刹车片之间的间隔不会变得过大,因此,如果在从电动制动装置的结构要素的异常或故障恢复的情况下,能提高用于产生预先确定的按压力的响应性。
[0067]
此外,根据实施方式2的车辆被构成为,具有多个车轮,在这些多个车轮中的至少一个中具备前述的电动制动装置,在该电动制动装置的结构要素中的至少一个发生了故障时,仅针对发生了故障的电动制动装置,将刹车片拉离盘式转子。因此,即使在电动制动装置的结构要素、和各种传感器发生了故障的情况下,也并非立即停止电动机从而使得电动制动装置不进行动作,而是通过由控制器单元实施对电动机的控制,以使得在使电动机进行反向旋转以将盘式转子和刹车片拉离之后停止电动机,从而可以避免制动粘着。即,即使在车辆的行驶中、特别地在车辆减速中电动制动装置的结构要素发生了故障,也不会变得无法控制车辆的制动,而是能利用例如其他车轮上所搭载的制动装置,来使车辆正常行驶或停止。
[0068]
另外,在实施方式2中,虽然基于来自各种传感器和制动单元的输入信号来实施故障判定,但是也可以设为接收来自各种传感器及制动单元的失败信号,以进行故障判定。在该情况下,这些失败信号也可以作为模拟信号或者数字信号被接收,也能够通过其他通信来接收。
[0069]
实施方式3根据实施方式3的电动制动装置的整体结构如前述的图1所示的那样。在实施方式3中,在控制器单元6设置有作为温度检测单元的温度传感器6h。其他详细的说明与前述的实施
方式2相同。在实施方式3中,控制器单元6的结构和动作与实施方式1、2不同。以下,基于附图,对根据实施方式3的电动制动装置进行详细说明。
[0070]
图7是示出根据实施方式3的电动制动装置中的控制器单元的结构的框图。如图7所示,控制器单元6具备电动机驱动单元6f。电动机驱动单元6f例如基于从制动单元14输入的目标按压力信号a、从旋转角传感器9输入的旋转角信号b、从电动机电流传感器10a、10b、10c输入的电动机电流信号c、从载重传感器8输入的载重信号d、从电源电压传感器102输入的电源电压信号e、和从电源电流传感器101输入的电源电流信号f中的至少一个信号,来输出用于对电动机5的旋转方向、旋转速度、和转矩进行控制的电动机驱动信号g。
[0071]
从电动机驱动单元6f输出的电动机驱动信号g被输入到对功率转换器的多个半导体开关元件进行开关控制的驱动电路(未图示)。驱动电路基于被输入的驱动信号g,来对多个半导体开关元件进行开关控制,并且控制从功率转换器被提供到电动机5的功率。
[0072]
此外,控制器单元6具备作为温度检测单元的温度传感器6h、和温度异常判定单元6g。温度异常判定单元6g基于来自温度传感器6h的温度信号t,判定电动制动装置100的结构要素中是否未发生过热异常,输出温度异常判定信号l。
[0073]
另外,控制器单元6具备电动机驱动可否判定单元6i。从温度异常判定单元6g将温度异常判定信号l输入电动机驱动可否判定单元6i,电动机驱动可否判定单元6i根据该温度异常判定信号l的信息,来判定是否能够驱动电动机5,并输出驱动可否判定信号k。电动机驱动单元6f被构成为,被输入有来自温度异常判定单元6g的温度异常判定信号l、和来自电动机驱动可否判定单元6i的电动机驱动可否判定信号k,根据电动制动装置100的结构要素和各传感器有无异常,来变更电动机5的驱动方法。
[0074]
温度传感器6h被设置于例如在使电动制动装置100进行动作时,处于高温的结构要素或元器件的附近,或温度条件严苛的结构要素或元器件、即因电动制动装置100的动作而所允许的温度上升较小的结构要素或元器件的附近,检测该结构要素或元器件的温度并且输出温度信号t。另外,这里,将温度传感器6h设为一个,但为了更高精度地检测结构要素或元器件的温度并且进行保护,也可以设置多个温度传感器。
[0075]
电动机驱动单元6f被构成为,被输入有来自温度异常判定单元6g的温度异常判定信号l、和来自电动机驱动可否判定单元6i的电动机驱动可否判定信号k,根据基于这些信号的温度异常的有无及电动机驱动可否状况,来变更电动机的驱动方法。
[0076]
接着,对控制器单元6的动作进行说明。图8是示出根据实施方式3的电动制动装置中的控制器单元的动作的流程图。在图8中,控制器单元6首先在步骤s801中,例如如图7的框图所示那样地,输入从制动单元14输出的目标按压力信号a、从旋转角传感器9输出的旋转角信号b、从电动机电流传感器10a、10b、10c输出的电动机电流信号c、从载重传感器8输出的载重信号d、从电源电压传感器102输出的电源电压信号e、和从电源电流传感器101输出的电源电流信号f。此外,利用在控制器单元6设置的温度传感器6h,来检测电动制动装置100的结构要素或元器件的温度。接着,前进到步骤s802。
[0077]
在步骤s802中,基于温度传感器6h所检测出的温度信号t,判定电动制动装置100的结构要素或元器件中是否未发生过热异常。作为过热异常判定的一个示例,例如,存在温度信号t被检测出在预先确定的值以上的值这一情况等。当在步骤s803中确认了步骤s802中被判定为没有温度异常这一情况时(“否”),前进到步骤s806,输出电动机驱动信号g以使
电动机5进行通常动作。这里,所谓电动机5的通常动作,是指电动机5进行动作,以使得第1刹车片21和第2刹车片22相对于盘式转子1的按压力与基于来自制动单元14的目标按压力信号a的目标按压力相一致。电动机5通过通常动作,从而产生所要求的旋转方向、旋转速度、以及转矩。
[0078]
另一方面,当在步骤s803中确认了步骤s802中被判定为有温度异常这一情况时(“是”),前进到步骤s804。在步骤s804中,基于在步骤s802中的异常判定的结果,判定是否能够驱动电动机5。例如,即使在电动制动装置100的结构要素中发生过热异常的情况下,如果来自各种传感器的信号是正常的,则也能控制电动机5,因而,如果异常判定是仅根据过热异常来进行的异常判定,则在步骤s804中判定为能够驱动电动机5。
[0079]
另一方面,在步骤s804中,在判定为不能驱动电动机5的情况下(“否”),前进到步骤s808,停止电动机5。在步骤s804中,在如前述那样判定为能够驱动电动机5的情况下(“是”),前进到步骤s805。
[0080]
在步骤s805中,判定盘式转子1的第1面11与第1刹车片21之间的间隔、和盘式转子1的第2面12与第2刹车片22之间的间隔是否在预先确定的值以上。这里,所谓预先确定的间隔的值,是指为了避免制动粘着而被设定为足够的间隔的值,或被设定为用于使刹车片不会因摩擦而变得过热的足够的间隔的值。
[0081]
盘式转子1的第1面11与第1刹车片21之间的间隔、以及盘式转子1的第2面12与第2刹车片22之间的间隔可以直接通过传感器来测量,但例如也可以设为根据表示电动活塞位置与按压力之间的关系的特性图、以及基于来自旋转角传感器的驱动轴13的旋转角的信息,来推定前述的间隔。在该情况下,能够使用通过根据图6的前述的推定方法来推定得到的间隔,对电动机进行驱动,以将盘式转子与刹车片之间的间隔设为预先确定的值以上。
[0082]
在步骤s805中,在判定为盘式转子1的第1面11与第1刹车片21之间的间隔、和盘式转子1的第2面12与第2刹车片22之间的间隔小于预先确定的值的情况下(“否”),前进到步骤s807,为了将第1刹车片21和第2刹车片22拉离盘式转子1,输出用于使电动机5进行反向旋转的电动机驱动信号g。
[0083]
在步骤s805中,在判定为盘式转子1的第1面11与第1刹车片21之间的间隔、和盘式转子1的第2面12与第2刹车片22之间的间隔在预先确定的值以上的情况下(“是”),由于判断为盘式转子和刹车片被充分拉离,因而前进到步骤s808,使电动机5停止。此外,关于电动制动装置100的结构要素发生异常时的电动机的驱动,也可设为限制电动机5的驱动方法,例如,将电动机5的转速设为预先确定的值以下,或将电动机5的转矩(电流)设为预先确定的值以下等。在该情况下,电动机5的转速或电动机5的转矩(电流)的预先确定的值分别优选为被设定成不破坏电动机5或电动制动装置100的结构要素。
[0084]
如以上那样地,即使在电动制动装置的结构要素中发生温度异常的情况下,也并非立即停止电动机从而使得电动制动装置不进行动作,而是通过由控制器单元实施电动机控制,以使得在使电动机进行反向旋转以将盘式转子和刹车片拉离之后停止电动机,从而可以避免制动粘着。即,即使在车辆的行驶中、特别地在车辆减速中电动制动装置的结构要素发生了温度异常,也不会发生变得无法控制车辆的制动这样的情形,而是能利用其他车轮上所搭载的制动装置,来使车辆正常行驶/停止。
[0085]
此外,在实施方式3中,虽然记载了电动制动装置的结构要素发生过热从而变为异
常的情况,但即使存在温度传感器自身的故障,也可通过以相同的控制流程来对电动机进行驱动,从而得到相同的效果。
[0086]
另外,在实施方式3中,虽然在控制器单元中设置了对元器件温度进行检测的温度传感器,但也可在各个结构要素中设置检测电动机、盘式转子、刹车片、制动钳的结构要素的温度的温度传感器,在由各个温度传感器所检测出的温度在判定为温度异常的预先确定的值以上时,能够通过以相同的控制流程来驱动电动机,从而得到相同的效果。
[0087]
此外,根据实施方式3的车辆被构成为,具有多个车轮,在这些多个车轮中的至少一个中具备前述的电动制动装置,在该电动制动装置的结构要素中的至少一个中发生了故障时,仅针对发生了故障的电动制动装置,将刹车片拉离盘式转子。因此,即使在电动制动装置的结构要素、和各种传感器发生了故障的情况下,也并非立即停止电动机从而使得电动制动装置不进行动作,而是通过由控制器单元实施对电动机的控制,以使得在电动机进行反向旋转以将盘式转子和刹车片拉离之后停止电动机,从而可以避免制动粘着。即,即使在车辆的行驶中、特别地在车辆减速中电动制动装置的结构要素发生了故障,也不会变得无法控制车辆的制动,而是能利用例如其他车轮上所搭载的制动装置,来使车辆正常行驶或停止。
[0088]
另外,在实施方式3中,虽然基于来自各种传感器和制动单元的输入信号来实施故障判定,但是也可以设为接收来自各种传感器及制动单元的失败信号,以进行故障判定。在该情况下,这些失败信号也可以作为模拟信号或者数字信号被接收,也能够通过其他通信来接收。
[0089]
图9是示出图2、图4及图7所示的控制器单元的硬件结构的框图。如图9所示那样地,作为硬件的一个示例,实施方式1的图2所示的控制器单元6、实施方式2的图4所示的控制器单元6、和实施方式3的图7所示的控制器单元6由处理器1000和存储装置1100所构成。虽未图示,但存储装置1100具备随机存取存储器等易失性存储装置、和闪存等非易失性的辅助存储装置。此外,也可具备硬盘的辅助存储装置,以取代闪存。处理器1000执行从存储装置1100输入的程序。在该情况下,从辅助存储装置经由易失性存储装置将程序输入到处理器1000。此外,处理器1000可将运算结果等数据输出至存储装置1100的易失性存储装置,也可经由易失性存储装置将数据保存到辅助存储装置。
[0090]
以上叙述的实施方式1、实施方式2、及实施方式3中所示的结构为一个示例,即使是以下所叙述的结构,也能得到相同效果。即,例如在图1中,被安装在制动钳3上的电动机5与控制器单元6设为分开,但是也可以设为将它们一体化的构造。此外,电动机电流传感器10a、10b、10c虽然搭载在三相导体上,但是也可以将它们内置于控制器单元6。另外,作为制动钳3的构造,以利用电动活塞来仅按压第1刹车片的单侧施压结构来进行了说明,但是也可以将其设为也利用电动活塞来按压第2刹车片的两侧施压构造。此外,在图1中,采用设想为三相电动机的结构,但也可为有刷电动机。另外,在图1中记载为电动机5与电动活塞4直接相连,但也可设为在它们之间搭载减速齿轮。
[0091]
图1所示的制动单元14也可以与由车辆的乘客所操作的刹车制动踏板(未图示)相连接。在该情况下,如实施方式1、实施方式2、以及实施方式3所示的那样,若即使设为由车辆的乘客来操作了刹车制动踏板,则在电动制动装置100的结构要素中发生故障或异常的情况下,也优选为驱动电动机以避免制动粘着,并进行动作以使车辆停止。在车辆上有多个
车轮,即使变为1个轮子的电动制动装置不进行动作这样的状态,其他车辆的制动装置也能进行动作,由此作为车辆可以正常地行驶或者停止。
[0092]
另一方面,即使变为1个轮子的电动制动装置不进行动作这样的状态,其他车辆的制动装置也可进行动作,由此作为车辆可以正常地行驶或者停止,因此车辆的乘客有可能未注意到1个轮子的电动制动装置的故障或者异常。因而,通过搭载用于将电动制动装置的故障或异常向车辆的乘客通知的灯或蜂鸣器等,可使乘客知道电动制动装置的异常。
[0093]
本申请虽然记载了各种示例性的实施方式及实施例,但在一个或多个实施方式中所记载的各种特征、形态、及功能并不限于适用于特定的实施方式,也可单独地或进行各种组合来适用于实施方式。因此,未例示的无数变形例设想为也在本申请所公开的技术范围内。例如,包含对至少一个结构要素进行变形的情况,添加至少一个结构要素的情况或省略至少一个结构要素的情况,还包含提取出至少一个结构要素并与其他实施方式的结构要素进行组合的情况。标号说明
[0094]
1盘式转子,21第1刹车片,22第2刹车片,3制动钳,4电动活塞,5电动机,6控制器单元,7电源,8载重传感器,9旋转角传感器,10a、10b、10c电动机电流传感器,101电源电流传感器,102电源电压传感器,13驱动轴,14制动单元,6a、6c、6f电动机驱动单元,6b故障判定单元,6d异常判定单元,6e、6i电动机驱动可否判定单元,6g温度异常判定单元,6h温度传感器,1000处理器,1100存储装置。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips