
 商标分类
商标分类  商标转让
商标转让 
用于在车辆中执行自主驾驶过程的方法与流程
 2021-02-03 15:02:18|
2021-02-03 15:02:18| 235|
235| 起点商标网
起点商标网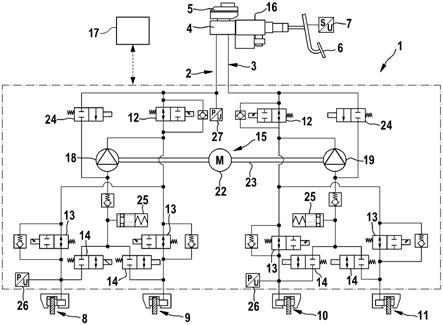
[0001]
本发明涉及一种用于在车辆中执行自主驾驶过程的方法。
背景技术:
[0002]
在wo 2018/046253 a1中描述一种用于将自主驾驶转移成手动驾驶的与营业用车辆相关的方法。在转移(
ü
bergabe)时检验:驾驶员是否被授权停留在营业用车辆中并且在那里实施驾驶活动。只要这是这种情况并且此外驾驶员操作制动踏板以及触发隔离开关,则进行从自主驾驶到手动驾驶的期望转移。
[0003]
由de 11 2016 004 141 t5已知一种用于车辆的辅助系统,所述辅助系统使得能够自主操作制动系统。该辅助系统对于通过驾驶员的脚不小心地刹住制动踏板的情况也允许自主执行的制动过程。
技术实现要素:
[0004]
利用根据本发明的方法,可以在车辆中执行自主驾驶过程(autonomer fahrvorgang)。在此情况下,对于在自主执行的驾驶过程期间进行车辆中的人员的人员驾驶干预的情况,当所涉及的人员不具有驾驶授权时使该人员驾驶干预失效,所述人员驾驶干预影响车辆的行驶性能或行驶动力学。
[0005]
该行为方式具有以下优点:可以在自主运动的车辆中显著改善行驶安全性。因此,对行驶性能或行驶动力学产生影响的对车辆的每个手动干预在自主执行的驾驶过程期间处于执行干预的人员的驾驶授权的保留条件下(unter dem vorbehalt
…
stehen)。如果给出驾驶授权,则可以执行人员驾驶干预,由此影响并且必要时中断自主驾驶过程。相反地,如果不存在执行驾驶干预的人员的驾驶授权,则使相应的人员驾驶干预失效。
[0006]
使人员驾驶干预(personenfahreingriff)失效有利地既包括使通过人员驾驶干预激活的驾驶操作单元无效的情形,又有利地包括刹住(blockieren)所激活的驾驶操作单元的情形。但是,在可替代实施方案中,也可能足够的是仅使所激活的驾驶操作单元无效或者仅刹住所激活的驾驶操作单元。
[0007]
该方法优选地涉及驾驶员或位于驾驶员座位上的人员,其驾驶授权被检验。但是,该方法附加地也可以涉及车辆中的其他人员,例如同乘者座位或后座上的人员,其故意地或无意地在车辆中执行人员驾驶干预,例如握住方向盘或操作手制动器。这种情况也由根据本发明的方法包括,因为确定出不位于驾驶员座位上的人员不具有当前的驾驶授权,紧接着使由该人员执行的驾驶干预失效。可能的是,仅仅检验驾驶员的驾驶授权,或者在可替代实施方案中,既检验驾驶员的驾驶授权,又检验不位于驾驶员座位上的车辆中人员的驾驶授权或干预授权。
[0008]
必要时由车辆中的人员操作的驾驶操作单元影响车辆的行驶性能或行驶动力学。尤其是,经由驾驶操作单元影响车辆的纵向动力学和/或横向动力学。驾驶操作单元尤其是车辆中的踏板、优选是制动踏板。但是,也考虑其他驾驶操作单元,例如加速踏板或方向盘。
bremsanforderung)失效。该行为方式保持对车辆的行驶动力学没有影响,因为通过驾驶员的制动压力要求仅直至达到自主制动压力要求为止被实现。在液压制动系统中有预压传感器,其中可以由驾驶员经由所述预压传感器确定制动压力要求。
[0017]
可能适宜的是,在通过驾驶员进行制动踏板操作期间,在达到由自主系统预先给定的制动压力极限之后将制动液从车轮制动器输送到液压制动回路中的缓冲容器中或者输送到液压缸中。
[0018]
如果在达到由自主系统预先给定的制动压力极限之后,由于可能的等待时间附加地经由驾驶员操作来建立制动压力,并且将容量推移到车轮制动器中,则可能适宜的是,将该液压容量输送回缓冲容器或制动压力缸中。
[0019]
为了产生警告信号,根据另一有利的实施方案可能适宜的是,即使不存在驾驶授权,在驾驶员操作制动踏板期间通过打开液压制动回路中的入口阀也暂时允许压力建立。由于暂时压力建立,车辆相应地暂时被减速,这可以由驾驶员感知并且可以被解释为警告信号。有利地,实现与经由通过驾驶员进行踏板操作会产生的压力建立不同的压力建立。例如,可能适宜的是,仅暂时实现较高的压力建立或使以时间延迟进行压力建立。
[0020]
根据同样涉及当在无驾驶授权的情况下发生人员驾驶干预时产生的警告信号的另一有利的实施方案,在未经授权的制动踏板操作情况下通过相应短地且受控制地打开入口阀来暂时允许液压容量流,以便允许踏板运动。接着,制动液可以被输送回,用以调制制动踏板中的恢复力,并且由此警告驾驶员。此外,可能的是,自主地调制制动压力,以便调整制动踏板中的相应的恢复力和/或相应改变的减速(verz
ö
gerung)。
[0021]
必要时,多次重复调制制动踏板中的制动力或恢复力,以便产生明确可感知的警告信号。此外,可能的是,尤其是以补偿制动压力的方式自动地影响车辆的驱动功率,以便将车辆速度保持在额定速度。
[0022]
制动系统是液压制动系统,所述液压制动系统尤其是装备有附加的esp系统(电子稳定程序),该esp系统在液压回路中包括esp液压泵。在这种制动系统情况下,上述方法仅仅能够经由软件操控来实现。
[0023]
本发明此外涉及用于执行上述方法的控制设备。各种方法步骤在控制设备中运行,在所述控制设备中通过在车辆中操控车辆制动器、驱动电机和/或转向系统产生用于执行自主驾驶过程的控制信号。在控制设备中检验是否存在在无驾驶授权情况下的人员驾驶干预,其中在这种情况下,使人员驾驶干预失效。与此相应地,可以经由控制设备使经由人员驾驶干预激活的驾驶操作单元无效,其方式是例如在制动踏板的情况下打开或关闭制动回路中的阀。
[0024]
最后,本发明还涉及一种车辆,其具有相应的控制设备和可经由控制设备操控的驾驶操作单元。
[0025]
本发明此外还涉及一种具有程序代码的计算机程序产品,所述程序代码被设计用于实施上述方法步骤。该计算机程序产品在上述控制设备中运行。
附图说明
[0026]
可以从其他权利要求、附图说明和附图中获悉其他优点和适宜的实施方案。其中:图1示出车辆制动系统的液压电路图,
图2示出具有用于在车辆中执行自主驾驶过程的方法步骤的流程图。
具体实施方式
[0027]
在根据图1的液压电路图中示出的在车辆中的液压制动系统1具有两个交叉(
ü
ber kreuz)布置的制动回路2和3。第一制动回路2被构造为前轴制动回路,并且第二制动回路3被构造为后轴制动回路,所述制动回路2、3用于给左前和右前轮处的车轮制动单元8和9或左后和右后轮处的车轮制动单元10和11供应液压制动液。
[0028]
可替代地也考虑制动回路2和3的交叉划分,其中,车轮制动单元8和9布置在左前和右后轮处,而车轮制动单元10和11布置在右前和左后轮处。
[0029]
两个制动回路2、3连接到共同的主制动缸4上,所述主制动缸经由制动液体储存容器5被供应制动液。主制动缸4由驾驶员经由制动踏板6操作,由驾驶员施加的踏板行程经由踏板行程传感器7测量。可电操作的制动力放大器16位于制动踏板6和主制动缸4之间,所述制动力放大器包括例如电动机,所述电动机优选地经由变速箱(getriebe)操作主制动缸4(智能化助力器(ibooster))。
[0030]
转换阀12布置在每个制动回路2、3,所述转换阀位于主制动缸与相应的车轮制动单元8和9或10和11之间的流动路径中。转换阀12在其无流的(stromlos)初始位置(grundstellung)中打开。给每个转换阀12分配有并联连接的止回阀,其中可以在相应的车轮制动单元的方向上流经所述止回阀。
[0031]
入口阀(einlassventile)13位于转换阀12与相应的车轮制动单元8、9或10、11之间,其中给所述入口阀13分配止回阀,其中可以在反方向上、也即从车轮制动单元朝向主制动缸的方向流经所述止回阀。车辆前轮处的入口阀13无流地打开,车辆后轮处的入口阀13在无流状态下关闭,但是在超过所定义的压差情况下所述入口阀被置于打开位置(
ö
ffnungsstellung)(与压差有关地无流地关闭)。
[0032]
给每个车轮制动单元8、9或10、11分别分配排放阀14,所述排放阀无流地关闭。排放阀14分别与泵单元15的吸入侧连接,所述泵单元在每个制动回路2、3中具有泵18或19。共同的电驱动电机或泵电机22分配给泵单元,所述电驱动电机或泵电机经由轴23操作两个泵18和19。泵18或19的压力侧对于每个制动回路连接到转换阀12和两个入口阀13之间的管路分段上。
[0033]
泵18和19的吸入侧分别与主或高压切换阀24连接,该主或高压切换阀以液压的方式连接到主制动缸4上。在驾驶动态调节干预的情况下,可以打开在无流状态下关闭的主切换阀24,用于快速制动压力建立,使得泵18和19直接从主制动缸4吸取液压液。可以与通过驾驶员对制动系统的操作无关地执行这种制动压力建立。具有两个单泵18和19、电泵电机22和轴23的泵单元15可以属于驾驶员辅助系统并且构成电子稳定程序(esp系统),该电子稳定程序尤其是被激活用于使车辆稳定。
[0034]
对于每个制动回路2、3,液压蓄能器25位于排放阀14与泵18和19的吸入侧之间,所述液压蓄能器25用于中间存储制动液体,所述制动液体在驾驶动态干预期间通过排放阀14从车轮制动单元8、9或10、11被排出。给每个液压蓄能器25分配止回阀,所述止回阀在泵18、19的吸入侧的方向上打开。
[0035]
为了进行压力测量,压力传感器26在每个制动回路2、3中分别位于车轮制动单元
8、9或10、11的区域中。另一压力传感器27与主制动缸4相邻地布置在制动回路2中。
[0036]
具有泵单元15的esp系统构成制动执行系统,用于在两个制动回路2、3中在车轮制动单元中与驾驶员无关地产生液压制动压力。使用esp系统用于使车辆稳定,其方式是以防止车轮刹住的方式操控制动系统中的各种阀以及泵18和19。
[0037]
此外,给制动系统1分配控制设备17,在所述控制设备中处理传感器信号并且产生控制信号(stellsignal)用于操控活跃的(aktiver)单元、例如esp系统的制动力放大器、阀以及泵。
[0038]
在图2中示出具有用于对于驾驶员或车辆中的另一人员执行驾驶干预的情况在车辆中执行自主驾驶过程的方法步骤的流程图。
[0039]
首先,在第一方法步骤30中检验车辆是否处于自主行驶状态,在所述自主行驶状态下尤其是完全自主地利用自动制动、加速和转向干预来控制车辆。如果这不是这种情况,则遵循否分支(“否(n)”)再次返回到步骤30中询问的开始,并且以循环间隔重新经历询问。
[0040]
相反地,如果车辆处于自主驾驶过程,则遵循是分支(“是(y)”)前进到下一方法步骤31,在该下一方法步骤中询问当前是否存在通过车辆中的人员的驾驶干预。该驾驶干预尤其是通过驾驶员对制动踏板的操作。然而,也考虑其他驾驶干预,尤其是加速踏板的操作和方向盘的操作。
[0041]
如果不存在这种驾驶干预,则遵循否分支再次返回到整个方法的开始,从在步骤30处开始以循环间隔重新经历所述整个方法。相反地,如果存在这种驾驶干预,则遵循是分支前进到下一步骤32。
[0042]
在步骤32中,检验是否在驾驶授权情况下进行了来自步骤31的驾驶干预。该授权可以在行驶开始之前例如根据驾驶员的标识、例如通过检验驾驶证或其他身份证来进行。附加地或可替代地,也可能的是,尤其是鉴于高度疲劳状态或鉴于影响驾驶能力的物质的服用,在车辆中经由传感器系统检验驾驶员的当前驾驶授权。这例如通过以下方式进行,即从车辆中的驾驶操作单元的先前的或当前的操作中、例如从转向运动中来分析以传感方式检测的状态参量。附加地或可替代地,也可能的是,例如经由摄像机检验驾驶员的头部运动或眼睛运动,并且鉴于与参考模式的一致性来进行检验,所述参考模式使推断出无驾驶能力性(fahrunt
ü
chtigkeit)或至少推断出驾驶员的降低的驾驶能力。
[0043]
如果在步骤32中的检验得出驾驶员在驾驶授权的情况下进行了干预,则遵循是分支前进到步骤33。在这种情况下,典型地涉及从自主驾驶过渡到手动驾驶,接着结束自主驾驶,并且将对驾驶的责任转到驾驶员上。在此情况下结束根据图2的方法。
[0044]
相反地,如果在步骤32中的询问得出驾驶员在无驾驶授权的情况下执行了干预,则遵循否分支前进到步骤34,并且使驾驶员的干预失效。这要么通过使由驾驶员产生的驾驶操作单元激活无效,要么通过刹住驾驶操作单元来进行。如果例如驾驶员已经操作了制动踏板或者刚要操作,则可以刹住制动踏板运动或者在不刹住(blockade)的情况下允许制动踏板运动,但是可以使其与制动系统液压分开,使得制动踏板运动对当前的制动力产生不产生影响。
[0045]
如果当前在自主行驶状态下执行制动过程,则必要时可以以这种方式考虑由驾驶员引起的制动踏板运动用于产生制动压力,直至达到由自主系统预先给定的制动压力水平为止。此外,使由驾驶员发起的制动踏板运动有效。
[0046]
该方法还适用于抵消通过车辆中的同乘者或乘客进行的未经授权的驾驶干预。经由车辆中的传感器系统可以确定:可能的驾驶干预由同乘者或乘客触发,接着使该驾驶干预无效。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips