
 商标分类
商标分类  商标转让
商标转让 
一种智能汽车警示装置的制作方法
 2021-02-03 15:02:26|
2021-02-03 15:02:26| 243|
243| 起点商标网
起点商标网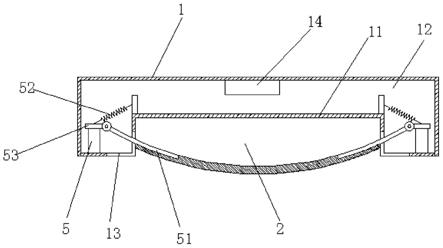
[0001]
本发明涉及安全预防技术领域,尤其是一种智能汽车警示装置。
背景技术:
[0002]
现在汽车上的三角警示牌需要在发生车祸以后人为的放置在汽车的后方作为警示标志防止二次事故的发生。由于人员的安全意识不到位或者车上人员由于车祸导致行为能力暂时丧失,使得三角牌在车祸现场没有得到及时正确的放置导致二次车祸事故的发生。
技术实现要素:
[0003]
为了解决上述问题,本发明提供一种智能汽车警示装置,能够在车辆发生车祸时自动移动至合适的位置以对后方的车辆进行预警。
[0004]
为了实现上述目的,本发明采用的技术方案为:
[0005]
一种智能汽车警示装置,包括固定座及警示盒,所述固定座固设在车辆的底部,且所述固定座背向所述车辆的一面凹设有固定槽,所述警示盒嵌在所述固定槽内,且所述警示盒通过第一锁定装置与所述固定座连接,所述第一锁定装置与所述车辆的控制系统连接,以使所述车辆发出碰撞时,所述第一锁定装置对所述警示盒进行释放;
[0006]
所述警示盒包括盒体、轮体、警示板、控制模组及电源模块,
[0007]
所述轮体设有两个,且两所述轮体分别通过轮毂电机与所述盒体的两端连接;
[0008]
所述盒体内设有放置腔,且所述盒体朝向所述固定槽的一面设有与所述放置腔连通的预留口,所述警示板位于所述放置腔内,且所述警示板一端通过收放机构与所述盒体连接,以使所述警示板远离所述收放机构的一端能够通过预留口伸出至所述放置腔外;
[0009]
所述盒体朝向所述固定槽一面设有触发按钮;
[0010]
所述控制模组分别与所述轮毂电机、所述收放机构、所述触发按钮及电源模块电连接,以使所述控制模组获得所述触发按钮的触发信号时,所述控制模组通过控制两所述轮毂电机将所述盒体移动至设定位置后,控制所述收放机构打开,以使所述警示板伸出至所述放置腔外。
[0011]
进一步地,所述第一锁定装置位于所述警示盒的两侧,且所述第一锁定装置包括电磁条、锁定件及释放弹簧,所述固定座设有空腔,所述电磁条位于所述固定槽的两侧并固定设置于所述空腔内,所述电磁条与所述车辆的控制系统连接,
[0012]
所述固定槽的两侧设有若干与所述空腔连通的开口,所述锁定件设有若干个,且所述锁定件一端通过所述开口穿入所述空腔内并与所述固定座转动连接,另一端朝向所述固定槽,所述锁定件位于所述空腔内的一端设有铁块,所述电磁条通电时,所述电磁条能够对所述铁块进行吸合,以使所述锁定件将所述警示盒抵接固定在所述固定槽内;所述释放弹簧位于所述空腔内,且所述释放弹簧两端分别与所述铁块及所述固定座固定连接,所述电磁条失电时,在所述释放弹簧的弹力作用下,所述锁定件远离所述空腔的一端朝远离所
述固定槽方向转动,以使所述警示盒能够从所述固定槽滑出。
[0013]
进一步地,所述收放机构包括转动件、发条弹簧及第二锁定装置(63),所述转动件为圆盘结构,所述转动件外壁的一侧与所述警示板的一端固定连接,所述转动件的圆心处设有转动轴,所述转动轴转动穿设于所述转动件并与所述盒体固定连接,所述发条弹簧套设在所述转动轴上,且所述转动轴两端分别与所述转动件及所述转动轴固定连接;
[0014]
所述第二锁定装置包括固定套、卡接件及电磁块,所述固定套一端与所述放置腔固定连接,另一端设有滑动槽,所述卡接件一端滑动嵌入所述滑动槽,另一端朝向所述转动件并设有卡齿,所述转动件的外壁设置有与所述卡齿卡接配合的齿条,所述滑动槽内设有锁定弹簧,所述锁定弹簧两端分别与所述固定套及所述卡接件抵接,在所述锁定弹簧的弹力作用下,所述卡接件朝向所述转动件滑动,并使所述卡齿与所述齿条卡接配合,以使所述警示板远离所述转动件的一端锁定在所述盒体内;
[0015]
所述电磁块位于所述滑动槽内并与所述固定套固定连接,且所述卡接件朝向所述滑动槽的一端为铁性材质,所述电磁块与所述控制模组电连接,通过所述控制模组控制所述电磁块得电,所述电磁块对所述卡接件进行吸合,所述卡齿与所述齿条分离,以在所述发条弹簧的弹力作用下,所述警示板远离所述转动件的一端能够通过预留口伸出至所述放置腔外。
[0016]
进一步地,所述预留口设有限位件,以使所述警示板伸长所述放置腔外时,所述述警示板能够与所述限位件抵接,以构成倾斜的角度。
[0017]
进一步地,所述控制模组包括控制模块及驱动模块,
[0018]
所述控制模块用于获取所述触发按钮的信号;
[0019]
所述驱动模块用于通过所述控制模块获取所述触发按钮的信号,并驱动两所述轮毂电机转动,以使所述警示盒与所述固定座分离后,移动至所述车辆后方的设定位置;
[0020]
所述控制模块通过所述驱动模块获取所述警示盒停止的信号,且所述控制模块在所述警示盒停止后控制所述收放机构打开,以使所述警示板伸出至所述放置腔外。
[0021]
进一步地,驱动模块包括距离判断子模块及移动纠正子模块,
[0022]
所述距离判断子模块用于通过所述轮毂电机的半径及所述轮毂电机的转速计算所述警示盒移动的距离,且所述距离判断子模块在所述警示盒到达设定的移动距离时控制两所述轮毂电机停止转动;
[0023]
所述移动纠正子模块用于通过超声波探头获取道路两侧的围栏,以使所述警示盒在道路范围内行使,所述超声波探头设有两个,且两所述超声波探头分别位于所述盒体的两端,且所述超声波探头与所述轮毂电机位于相同侧面;当一侧所述超声波探头感应到围栏的距离到达阈值时,所述移动纠正子模块控制与该所述超声波探头相对一侧的所述轮毂电机提速,直至所述超声波探头感应到围栏的距离小于阈值后,所述移动纠正子模块控制两所述轮毂电机以相同的转速运行。
[0024]
进一步地,所述驱动模块还包括状态感应模子模块,所述状态感应模子模块通过三轴陀螺传感器获取所述警示盒的移动及方向状态;所述距离判断子模块还能够根据所述状态感应模子模块计算出所述移动纠正子模块在控制所述警示盒转弯时所述警示盒移动的直线距离,且所述距离判断子模块在计算所述警示盒移动的距离时,将所述警示盒的转弯移动距离替换为直线移动距离。
[0025]
进一步地,所述控制模组还包括平衡模块,所述平衡模块用于通过所述三轴陀螺传感器制两所述轮毂电机,以使所述警示盒处于平衡状态并使所述警示板朝向上方。
[0026]
进一步地,所述控制模组还包括初始位置修正模块,所述初始位置修正模块用于通过所述三轴陀螺传感器获得所述警示盒脱离所述固定座前与所述警示盒落地后偏转的角度,所述初始位置修正模块计算出偏转角度,且所述初始位置修正模块根据所述轮体的半径及所述轮毂电机的转速,控制一所述轮毂电机转动,另一所述轮毂电机停止,以使所述警示盒脱离所述固定座前与所述警示盒落地后具有相同的角度。
[0027]
进一步地,所述控制模组还包括报警模块,所述报警模块用于通过所述控制模块获取所述触发按钮的信号,且所述报警模块将车辆的gps定位信息及预设的报警文字发送至预设的报警号码中。
[0028]
本发明的有益效果是:
[0029]
1.由于第一锁定装置与车辆的控制系统连接,当车辆的控制系统识别出车辆出现碰撞或事故时,第一锁定装置对警示盒进行释放,以使警示盒能够从车辆上脱离;当警示盒与固定座脱离后,触发按钮产生了触发信号,使得控制模组控制轮毂电机转动,警示盒移动至设定的位置,以使警示盒能够位移至事故发生处的后方,同时在收放机构的作用下,警示板伸出至盒体外,从而实现了对后方的车辆进行警示,使得驾驶员在丧失行为能力时,警示盒能够及时对后方的车辆作出警示,防止二次车祸事故的发生。
[0030]
2.在锁定弹簧的作用下,卡接件朝向转动件滑动,并使卡齿与齿条卡接配合,使得警示板能够固定在盒体内。当示盒移动至设定的位置后,控制模组控制电磁块得电,电磁块对卡接件进行吸合,使得卡接件朝远离转动件的方向移动,从而,卡齿与齿条分离,同时在发条弹簧的弹力作用下,警示板远离转动件的一端能够通过预留口伸出至放置腔外,使得警示板能够对后方的车辆进行警示,防止二次车祸事故的发生。
[0031]
3.由于车辆事故的发生地点可能为弯道,在移动纠正子模块的作用下,能够通过盒体的两端的超声波探头对道路的两侧进行监测,当某一端的超声波探头监测到围栏的距离到达阈值时,证明警示盒正在靠近围栏,移动纠正子模块控制与该超声波探头相对一侧的轮毂电机提速,使得警示盒能够进行转弯,防止警示盒移动出道路外。距离判断子模块是通过轮体的半径及轮毂电机的转速计算警示盒移动的距离,同时距离判断子模块预设了警示盒的移动距离,当警示盒转弯后,直线距离变短,从而导致了不能及时地为后方车辆提供警示作用,本发明在三轴陀螺传感器的作用下,使得距离判断子模块根据状态感应模子模块计算出移动纠正子模块在控制警示盒转弯时警示盒移动的直线距离,同时距离判断子模块在计算警示盒移动的距离时,将警示盒的转弯移动距离替换为直线移动距离,保证了警示盒在转弯后依然能够移动至所设定直线距离的位置。
[0032]
4.当车辆发生碰撞时,警示盒在释放的过程中会出现偏转,如警示盒在偏转后依旧进行直线运动,会导致警示盒朝向车辆的前方移动,因此,本发明中通过初始位置修正模块对警示盒的初始位置进行修正,使得警示盒产生偏转后能够进行调整,保证警示盒能够朝车辆后方进行移动。
附图说明
[0033]
图1是发明一较佳实施方式的智能汽车警示装置的结构示意图。
[0034]
图2是发明一较佳实施方式的智能汽车警示装置的警示盒结构示意图。
[0035]
图3是发明一较佳实施方式的智能汽车警示装置的警示盒内部结构示意图。
[0036]
图4是发明一较佳实施方式的智能汽车警示装置的第二锁定装置结构示意图。
[0037]
图5是发明一较佳实施方式的智能汽车警示装置的限位件结构示意图。
[0038]
图6是发明一较佳实施方式的智能汽车警示装置的控制框图。
[0039]
图7是发明一较佳实施方式的智能汽车警示装置的控制电路图。
[0040]
图中,1-固定座,11-固定槽,12-空腔,13-开口,2-警示盒,21-盒体,211-放置腔,212-预留口,213-触发按钮,214-限位件,22-轮体,221-轮毂电机,23-警示板,24-超声波探头,25-充电插口,3-控制模组,31-控制模块,32-驱动模块,321-距离判断子模块,322-移动纠正子模块,323-状态感应模子模块,33-平衡模块,34-初始位置修正模块,35-报警模块,4-电源模块,5-电磁条,51-锁定件,52-释放弹簧,53-铁块,6-转动件,61-发条弹簧,62-转动轴,63-第二锁定装置,64-固定套,641-卡接件,642-电磁块,643-滑动槽,644-卡齿,645-齿条,646-锁定弹簧。
具体实施方式
[0041]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0042]
需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
[0043]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0044]
请同时参见图1至图7,本发明一较佳实施方式的智能汽车警示装置,包括固定座1及警示盒2。
[0045]
固定座1固设在车辆的底部,且固定座1背向车辆的一面凹设有固定槽11,警示盒2嵌在固定槽11内,且警示盒2通过第一锁定装置与固定座1连接,第一锁定装置与车辆的控制系统连接,以使车辆发出碰撞时,第一锁定装置对警示盒2进行释放。
[0046]
本实施例中,第一锁定装置位于警示盒2的两侧,且第一锁定装置包括电磁条5、锁定件51及释放弹簧52,固定座1设有空腔12,电磁条5位于固定槽11的两侧并固定设置于空腔12内,电磁条5与车辆的控制系统连接。本实施例的中,电磁条5通过蓄电池14供电,蓄电池14通过车辆的电池进行充电。
[0047]
固定槽11的两侧设有若干与空腔12连通的开口13,锁定件51设有若干个,且锁定件51一端通过开口13穿入空腔12内并与固定座1转动连接,另一端朝向固定槽11,锁定件51
位于空腔12内的一端设有铁块53,电磁条5通电时,电磁条5能够对铁块53进行吸合,以使锁定件51将警示盒2抵接固定在固定槽11内。释放弹簧52位于空腔12内,且释放弹簧52两端分别与铁块53及固定座1固定连接,电磁条5失电时,在释放弹簧52的弹力作用下,锁定件51远离空腔12的一端朝远离固定槽11方向转动,以使警示盒2能够从固定槽11滑出。
[0048]
警示盒2包括盒体21、轮体22、警示板23、控制模组3及电源模块4。
[0049]
轮体22设有两个,且两轮体22分别通过轮毂电机221与盒体21的两端连接。本实施例的轮体22直径大于盒体21的最大高度,以使盒体21不会与地面接触。
[0050]
盒体21内设有放置腔211,且盒体21朝向固定槽11的一面设有与放置腔211连通的预留口212,警示板23位于放置腔211内,且警示板23一端通过收放机构与盒体21连接,以使警示板23远离收放机构的一端能够通过预留口212伸出至放置腔211外。
[0051]
盒体21朝向固定槽11一面设有触发按钮213。
[0052]
控制模组3分别与轮毂电机221、收放机构、触发按钮213及电源模块4电连接,以使控制模组3获得触发按钮213的触发信号时,控制模组3通过控制两轮毂电机221将盒体21移动至设定位置后,控制收放机构打开,以使警示板23伸出至放置腔211外。
[0053]
本实施例的盒体21和警示板23的表面均设有反光条,以实现对后车进行警示提醒。
[0054]
由于第一锁定装置与车辆的控制系统连接,当车辆的控制系统识别出车辆出现碰撞或事故时,第一锁定装置对警示盒2进行释放,以使警示盒2能够从车辆上脱离;当警示盒2与固定座1脱离后,触发按钮213产生了触发信号,使得控制模组3控制轮毂电机221转动,警示盒2移动至设定的位置,以使警示盒2能够位移至事故发生处的后方,同时在收放机构的作用下,警示板23伸出至盒体21外,从而实现了对后方的车辆进行警示,使得驾驶员在丧失行为能力时,警示盒2能够及时对后方的车辆作出警示,防止二次车祸事故的发生。
[0055]
本实施例中,收放机构包括转动件6、发条弹簧61及第二锁定装置63,转动件6为圆盘结构,转动件6外壁的一侧与警示板23的一端固定连接,转动件6的圆心处设有转动轴62,转动轴62转动穿设于转动件6并与盒体21固定连接,发条弹簧61套设在转动轴62上,且转动轴62两端分别与转动件6及转动轴62固定连接;
[0056]
第二锁定装置63包括固定套64、卡接件641及电磁块642,固定套64一端与放置腔211固定连接,另一端设有滑动槽643,卡接件641一端滑动嵌入滑动槽643,另一端朝向转动件6并设有卡齿644,转动件6的外壁设置有与卡齿644卡接配合的齿条645,滑动槽643内设有锁定弹簧646,锁定弹簧646两端分别与固定套64及卡接件641抵接,在锁定弹簧646的弹力作用下,卡接件641朝向转动件6滑动,并使卡齿644与齿条645卡接配合,以使警示板23远离转动件6的一端锁定在盒体21内;
[0057]
电磁块642位于滑动槽643内并与固定套64固定连接,且卡接件641朝向滑动槽643的一端为铁性材质,电磁块642与控制模组3电连接,通过控制模组3控制电磁块642得电,电磁块642对卡接件641进行吸合,卡齿644与齿条645分离,以在发条弹簧61的弹力作用下,警示板23远离转动件6的一端能够通过预留口212伸出至放置腔211外。
[0058]
在锁定弹簧61的作用下,卡接件641朝向转动件6滑动,并使卡齿644与齿条645卡接配合,使得警示板23能够固定在盒体内。当警示盒2移动至设定的位置后,控制模组3控制电磁块642块得电,电磁块642对卡接件进行吸合,使得卡接件641朝远离转动件的方向移
动,从而,卡齿644与齿条645分离,同时在发条弹簧的弹力作用下,警示板23远离转动件6的一端能够通过预留口212伸出至放置腔211外,使得警示板23能够对后方的车辆进行警示,防止二次车祸事故的发生。
[0059]
如图5所示,预留口212设有限位件213,以使警示板23伸长放置腔211外时,警示板23能够与限位件213抵接,以构成倾斜的角度。
[0060]
本实施例中,盒体21朝向固定座1的一面设有充电接口25,充电接口25与电源模块4电连接,固定座1设有充电插头,充电插头与车辆的电池电连接,当警示盒2固定在固定座1上时,充电插头嵌入充电接口25内,以对电源模块4进行充电,保证警示盒2具有充足的电量。
[0061]
本实施例中,控制模组3包括控制模块31及驱动模块32。
[0062]
控制模块31用于获取触发按钮213的信号。
[0063]
驱动模块32用于通过控制模块31获取触发按钮213的信号,并驱动两轮毂电机221转动,以使警示盒2与固定座1分离后,移动至车辆后方的设定位置。
[0064]
控制模块31通过驱动模块32获取警示盒2停止的信号,且控制模块31在警示盒2停止后控制收放机构打开,以使警示板23伸出至放置腔211外。
[0065]
驱动模块32包括距离判断子模块321及移动纠正子模块322。
[0066]
距离判断子模块321用于通过轮体22的半径及轮毂电机221的转速计算警示盒2移动的距离,且距离判断子模块321在警示盒2到达设定的移动距离时控制两轮毂电机221停止转动。
[0067]
移动纠正子模块322用于通过超声波探头24获取道路两侧的围栏,以使警示盒2在道路范围内行使,超声波探头24设有两个,且两超声波探头24分别位于盒体21的两端,且超声波探头24与轮毂电机221位于相同侧面;当一侧超声波探头24感应到围栏的距离到达阈值时,移动纠正子模块322控制与该超声波探头24相对一侧的轮毂电机221提速,直至超声波探头24感应到围栏的距离小于阈值后,移动纠正子模块322控制两轮毂电机221以相同的转速运行。
[0068]
由于车辆事故的发生地点可能为弯道,在移动纠正子模块322的作用下,能够通过盒体21的两端的超声波探头24对道路的两侧进行监测,当某一端的超声波探头24监测到围栏的距离到达阈值时,证明警示盒2正在靠近围栏,移动纠正子模块322控制与该超声波探头24相对一侧的轮毂电机221提速,使得警示盒2能够进行转弯,防止警示盒2移动出道路外。
[0069]
驱动模块32还包括状态感应模子模块323,状态感应模子模块323通过三轴陀螺传感器获取警示盒2的移动及方向状态;距离判断子模块321还能够根据状态感应模子模块323计算出移动纠正子模块322在控制警示盒2转弯时警示盒2移动的直线距离,且距离判断子模块321在计算警示盒2移动的距离时,将警示盒2的转弯移动距离替换为直线移动距离。
[0070]
距离判断子模块是通过轮体22的半径及轮毂电机221的转速计算警示盒2移动的距离,同时距离判断子模块321预设了警示盒2的移动距离,当警示盒2转弯后,直线距离变短,从而导致了不能及时地为后方车辆提供警示作用,本实施例在三轴陀螺传感器的作用下,使得距离判断子模块321根据状态感应模子模块323计算出移动纠正子模块322在控制警示盒2转弯时警示盒2移动的直线距离,同时距离判断子模块321在计算警示盒2移动的距
离时,将警示盒2的转弯移动距离替换为直线移动距离,保证了警示盒2在转弯后依然能够移动至所设定直线距离的位置。
[0071]
控制模组3还包括平衡模块33,平衡模块33用于通过三轴陀螺传感器制两轮毂电机221,以使警示盒2处于平衡状态并使警示板23朝向上方。
[0072]
控制模组3还包括初始位置修正模块34,初始位置修正模块34用于通过三轴陀螺传感器获得警示盒2脱离固定座1前与警示盒2落地后偏转的角度,初始位置修正模块34计算出偏转角度,且初始位置修正模块34根据轮体22的半径及转速,控制一轮毂电机221转动,另一轮毂电机221转动,以使警示盒2脱离固定座1前与警示盒2落地后具有相同的角度。
[0073]
控制模组3还包括初始位置修正模块34,初始位置修正模块34用于通过三轴陀螺传感器获得警示盒2脱离固定座1前与警示盒2落地后偏转的角度,初始位置修正模块34计算出偏转角度,且初始位置修正模块34根据轮体22的半径及转速,控制一轮毂电机221转动,另一轮毂电机221转动,以使警示盒2脱离固定座1前与警示盒2落地后具有相同的角度。
[0074]
当警示盒2出现了偏转,初始位置修正模块34通过三轴陀螺传感器记录水平方向的旋转角度α,然后初始位置修正模块34分别控制两个轮毂电机221转速,并以一轮毂电机221为原点,另外一个轮毂电机221转动,通过角度α,算出弧长l,再算出轮体22需要转动的圈数,让警示盒2转向,经过修正后,两个轮毂电机221再以同样的速度旋转,此时警示盒2开始往来车的方向行走。
[0075]
控制模组3还包括报警模块35,报警模块35用于通过控制模块31获取触发按钮213的信号,且报警模块35将车辆的gps定位信息及预设的报警文字发送至预设的报警号码中。报警模块35设有gps模块,当报警模块35在获得触发按钮213信号后,报警模块35将gps模块的定位信息和提前编辑好的警示文字通过nb-lot模块,利用窄带互联网把报警信息发送到提前设置好的电话号码上。
[0076]
如图7所示,本实施例的控制模组3采用stm32f103c8t6型号的mcu芯片,gps模块中管脚4(txd)与管脚5(rxd)分别连接上stm32f103c8t6芯片中的引脚32(pa10/rx)和引脚33(pa10/tx)完成gps定位功能。
[0077]
电磁块642设有继电器,且继电器的管脚3(in)与stm32f103c8t6芯片引脚18(pb0)连接接收输入信号实现继电器控制电磁块642的开启。
[0078]
nb-lot模块中管脚1(txd)与管脚2(rxd)分别连接上stm32f103c8t6芯片中的引脚21(pb10)和引脚22(pb11)实现通信功能。
[0079]
超声波探头24中由管脚2(trig)和管脚3(echo)与stm32f103c8t6上的引脚27(pb14)引脚28(pb15)连接完成单片机控制超声波探头24实现避障功能及保持道路内行驶的功能;
[0080]
轮毂电机221由控制电机芯片l293d的管脚1(en1)、管脚2(in1)、管脚7(in2)管脚连上stm32f103c8t6对应引脚11(pa1)、12(pa2)、13(pa3)控制一轮毂电机221运转,l293d的管脚9(en2)、管脚10(in3)、管脚15(in4)与stm32f103c8t6的引脚14(pa4)、15(pa5)、16(pa6)连接控制另一轮毂电机221运转。
[0081]
本实施例的智能汽车警示装置的运行过程为:
[0082]
s1.车辆控制系统控制电磁条5失电,在释放弹簧52的弹力作用下,锁定件51远离空腔12的一端朝远离固定槽11方向转动,以使警示盒2能够从固定槽11滑出。
[0083]
s2.控制模块31获得触发按钮213的触发信号,当警示盒2落地后,初始位置修正模块34用于通过三轴陀螺传感器获得警示盒2脱离固定座1前与警示盒2落地后偏转的角度,且初始位置修正模块34计算出偏转角度,且初始位置修正模块34根据轮体22的半径及转速,控制一轮毂电机221转动,另一轮毂电机221转动,以使警示盒2脱离固定座1前与警示盒2落地后具有相同的角度。
[0084]
s3.驱动模块32在获得触发按钮213的信号后,控制两轮毂电机221转动,警示盒2向车辆后方进行移动。当一侧超声波探头24感应到围栏的距离到达阈值时,移动纠正子模块322控制与该超声波探头24相对一侧的轮毂电机221提速,直至超声波探头24感应到围栏的距离小于阈值后,移动纠正子模块322控制两轮毂电机221以相同的转速运行。
[0085]
s4.距离判断子模块321通过轮体22的半径及轮毂电机221的转速计算警示盒2移动的距离,同时距离判断子模块321根据状态感应模子模块323计算出移动纠正子模块322在控制警示盒2转弯时警示盒2移动的直线距离,且距离判断子模块321在计算警示盒2移动的距离时,将警示盒2的转弯移动距离替换为直线移动距离。当警示盒2到达设定的移动距离时,距离判断子模块321控制两轮毂电机221停止转动。
[0086]
s5.控制模块31获得两轮毂电机221停止转动的信号后控制电磁块642得电,电磁块642对卡接件641进行吸合,卡齿644与齿条645分离,以在发条弹簧61的弹力作用下,警示板23远离转动件6的一端能够通过预留口212伸出至放置腔211外。
[0087]
s6.报警模块35在获得触发按钮213信号后,报警模块35将gps模块的定位信息和提前编辑好的警示文字通过nb-lot模块,利用窄带互联网把报警信息发送到提前设置好的电话号码上。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips