
 商标分类
商标分类  商标转让
商标转让 
一种可自动寻光充电的避障小车系统的制作方法
 2021-02-03 15:02:17|
2021-02-03 15:02:17| 259|
259| 起点商标网
起点商标网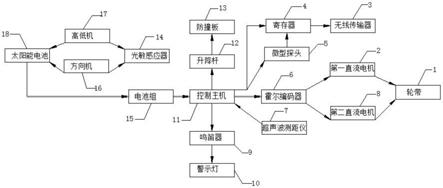
[0001]
本实用新型属于避障小车领域,尤其涉及一种可自动寻光充电的避障小车系统。
背景技术:
[0002]
自汽车发明以来,一直在人类生产生活当中扮演着极为重要的角色,从自动化向智能化方向转变是车辆发展的大趋势,而主动回避障碍是智能化载具的一个基本的安全要求,也是智能辅助驾驶的关键,另一方面,汽车的大范围应用也带来了严重的能源与环境污染问题,如今越来越多的汽车制造商正不断推出使用清洁能源的汽车方案,而太阳能汽车正是其中一种方案,但太阳能转化条件较为苛刻,现有的避障小车若太阳能板未能正对光源,则发电效率会大幅下降,当光源发生变化时,太阳能板无法及时调整自身姿势。
技术实现要素:
[0003]
本实用新型提供一种可自动寻光充电的避障小车系统,旨在解决太阳能转化条件较为苛刻,现有的避障小车若太阳能板未能正对光源,则发电效率会大幅下降,当光源发生变化时,太阳能板无法及时调整自身姿势的问题。
[0004]
本实用新型是这样实现的,一种可自动寻光充电的避障小车系统,包括安装模块,控制模块、避障模块和光源追踪模块,所述安装模块包括壳体,所述壳体一端转动安装轮带,所述控制模块包括控制主机,所述控制主机电性连接电池组,所述避障模块包括超声波测距仪,所述超声波测距仪电性连接控制主机,所述控制主机电性连接驱动装置,所述光源追踪模块包括光敏感应装置,所述光敏感应装置电性连接控制主机,所述控制主机电性连接舵机驱动组,所述舵机驱动组电性连接舵机组,所述舵机组一端固定安装太阳能电池,所述太阳能电池电性连接电池组。
[0005]
优选的,所述控制主机包括niosii软核处理器,所述niosii软核处理器电性连接dram控制器与epcs控制器,所述niosii软核处理器电性连接jtag串口。
[0006]
优选的,所述驱动装置包括第一直流电机,所述控制主机电性连接第一直流电机,所述控制主机电性连接第二直流电机,所述第一直流电机与第二直流电机均电性连接霍尔编码器,所述霍尔编码器电性连接控制主机。
[0007]
优选的,所述光敏感应装置包括光敏感应器,所述光敏感应器设有四个,所述四个光敏感应器分别对应上下左右四个方位。
[0008]
优选的,所述舵机组包括高低机,所述高低机电性连接控制主机。
[0009]
优选的,所述舵机组还包括方向机,所述方向机电性连接控制主机。
[0010]
优选的,所述壳体一端固定安装微型探头,所述微型探头电性连接控制主机,所述控制主机电性连接寄存器。
[0011]
优选的,所述寄存器一端电性连接无线传输器,所述无线传输器电性连接控制主机,所述无线传输器无线连接云端控制中心。
[0012]
优选的,所述壳体沿中心线对称开设两个安装孔,所述安装孔内设有缓冲弹簧,所
述缓冲弹簧一端固定安装升降杆,所述升降杆电性连接控制主机,所述升降杆一端固定安装防撞板。
[0013]
优选的,所述壳体一端固定安装鸣笛器,所述鸣笛器电性连接控制主机,所述壳体一端固定安装警示灯,所述警示灯电性连接控制主机。
[0014]
与现有技术相比,本实用新型的有益效果是:本实用新型的一种可自动寻光充电的避障小车系统,通过设置光源追踪模块,当光源出现移动时,光敏感应装置可以及时捕获光源的移动,并将光源移动信息转换为电信号传达至控制主机,控制主机根据计算,可以得到太阳能电池需要移动的角度,并通过舵机驱动组启动舵机组,舵机组根据光源的移动可以带动太阳能电池在水平和垂直方向移动,确保太阳能电池输入端时刻正对光源,保证太阳能电池对光源的充分利用,提高了资源的使用率,解决了太阳能转化条件较为苛刻,现有的避障小车若太阳能板未能正对光源,则发电效率会大幅下降,当光源发生变化时,太阳能板无法及时调整自身姿势的问题。
附图说明
[0015]
图1为本实用新型的系统流程图;
[0016]
图2为本实用新型中控制主机的结构示意图;
[0017]
1、轮带,2、第一直流电机,3、无线传输器,4、寄存器,5、微型探头,6、霍尔编码器,7、超声波测距仪,8、第二直流电机,9、鸣笛器,10、警示灯,11、控制主机,12、升降杆,13、防撞板,14、光敏感应器,15、电池组,16、方向机,17、高低机,18、太阳能电池,111、niosii软核处理器,112、jtag串口,113、dram控制器,114、epcs控制器。
具体实施方式
[0018]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
[0019]
请参阅图1-2,本实用新型提供一种技术方案:一种可自动寻光充电的避障小车系统,包括安装模块,控制模块、避障模块和光源追踪模块,安装模块包括壳体,壳体一端转动安装轮带1,控制模块包括控制主机11,控制主机11电性连接电池组15,避障模块包括超声波测距仪7,超声波测距仪7电性连接控制主机11,控制主机11电性连接驱动装置,光源追踪模块包括光敏感应装置,光敏感应装置电性连接控制主机11,控制主机11电性连接舵机驱动组,舵机驱动组电性连接舵机组,舵机组一端固定安装太阳能电池18,太阳能电池18电性连接电池组15。
[0020]
在本实施方式中,由于小车的控制系统为需要高精度的控制,niosii软核处理器111的计算精度高,响应速度快,满足了小车控制系统的需求,通过niosii软核处理器111电性连接dram控制器113与epcs控制器114,可以确保niosii软核处理器111在执行过程中的高稳定性,通过niosii软核处理器111电性连接jtag串口112,可以实现对控制主机11内原件进行分别测试,通过在控制主机11内设置两个设定值,当超声波测距仪7检测到前方有障碍物时,将信号传达至控制主机11,控制主机11经过计算确定与障碍物之间的距离处于那个设定区间,当与障碍物处于第一设定值时,控制主机11通过霍尔编码器6启动第一直流电
机2和第二直流电机8,带动轮带1进行移动,使小车进行转向避让,当与障碍物处于第二设定值时,由于第二设定值处于与障碍物非常近的距离,进而控制主机11通过霍尔编码器6启动第一直流电机2和第二直流电机8,带动轮带1进行移动,使小车反向移动,并进行转向避让,实现了避障的功能,当光源出现移动时,光敏感应装置可以及时捕获光源的移动,光敏感应器14将所接收到的光源信息收集并传达至控制主机11,通过光敏感应器14设有四个,四个光敏感应器14分别对应上下左右四个方位,使得光敏感应器14可以多角度的收集光源信号,便于太阳能电池18及时跟随光源移动,确保太阳能电池18任意时刻都是正对光源,并将光源移动信息转换为电信号传达至控制主机11,控制主机11根据计算,可以得到太阳能电池18需要移动的角度,并通过舵机驱动组启动舵机组,当控制主机11接收到光源移动的信号后,通过启动高低机17,由于光源会随着时间在竖直方向进行周期性转变,高低机17可以在竖直方向进行180度旋转,进而确保太阳能电池18在竖直方向上可以任意时刻正对光源,当控制主机11接收到光源移动的信号后,通过启动方向机16,由于光源会随着时间在水平方向进行周期性转变,方向机16可以在水平方向进行360度旋转,进而确保太阳能电池18在水平方向上可以任意时刻正对光源,舵机组根据光源的移动可以带动太阳能电池18在水平和垂直方向移动,确保太阳能电池18输入端时刻正对光源,保证太阳能电池18对光源的充分利用,提高了资源的使用率,解决了太阳能转化条件较为苛刻,现有的避障小车若太阳能板未能正对光源,则发电效率会大幅下降,当光源发生变化时,太阳能板无法及时调整自身姿势的问题。
[0021]
进一步的,控制主机11包括niosii软核处理器111,niosii软核处理器111电性连接dram控制器113与epcs控制器114,niosii软核处理器111电性连接jtag串口112。
[0022]
在本实施方式中,由于小车的控制系统为需要高精度的控制,niosii软核处理器111的计算精度高,响应速度快,满足了小车控制系统的需求,通过niosii软核处理器111电性连接dram控制器113与epcs控制器114,可以确保niosii软核处理器111在执行过程中的高稳定性,通过niosii软核处理器111电性连接jtag串口112,可以实现对控制主机11内原件进行分别测试。
[0023]
进一步的,驱动装置包括第一直流电机2,控制主机11电性连接第一直流电机2,控制主机11电性连接第二直流电机8,第一直流电机2与第二直流电机8均电性连接霍尔编码器6,霍尔编码器6电性连接控制主机11。
[0024]
在本实施方式中,通过在控制主机11内设置两个设定值,当超声波测距仪7检测到前方有障碍物时,将信号传达至控制主机11,控制主机11经过计算确定与障碍物之间的距离处于那个设定区间,当与障碍物处于第一设定值时,控制主机11通过霍尔编码器6启动第一直流电机2和第二直流电机8,带动轮带1进行移动,使小车进行转向避让,当与障碍物处于第二设定值时,由于第二设定值处于与障碍物非常近的距离,进而控制主机11通过霍尔编码器6启动第一直流电机2和第二直流电机8,带动轮带1进行移动,使小车反向移动,并进行转向避让,实现了避障的功能。
[0025]
进一步的,光敏感应装置包括光敏感应器14,光敏感应器14设有四个,四个光敏感应器14分别对应上下左右四个方位。
[0026]
在本实施方式中,光敏感应器14将所接收到的光源信息收集并传达至控制主机11,通过光敏感应器14设有四个,四个光敏感应器14分别对应上下左右四个方位,使得光敏
感应器14可以多角度的收集光源信号,便于太阳能电池18及时跟随光源移动,确保太阳能电池18任意时刻都是正对光源。
[0027]
进一步的,舵机组包括高低机17,高低机17电性连接控制主机11。
[0028]
在本实施方式中,当控制主机11接收到光源移动的信号后,通过启动高低机17,由于光源会随着时间在竖直方向进行周期性转变,高低机17可以在竖直方向进行180度旋转,进而确保太阳能电池18在竖直方向上可以任意时刻正对光源。
[0029]
进一步的,舵机组还包括方向机16,方向机16电性连接控制主机11。
[0030]
在本实施方式中,当控制主机11接收到光源移动的信号后,通过启动方向机16,由于光源会随着时间在水平方向进行周期性转变,方向机16可以在水平方向进行360度旋转,进而确保太阳能电池18在水平方向上可以任意时刻正对光源。
[0031]
进一步的,壳体一端固定安装微型探头5,微型探头5电性连接控制主机11,控制主机11电性连接寄存器4。
[0032]
在本实施方式中,通过在壳体一端固定安装微型探头5,可以时刻记录小车的行车情况,并通过寄存器4将视频信息储存起来,便于后期进行查阅。
[0033]
进一步的,寄存器4一端电性连接无线传输器3,无线传输器3电性连接控制主机11,无线传输器3无线连接云端控制中心。
[0034]
在本实施方式中,由于寄存器4容量有限,需要定时删除视频信息,通过在寄存器4一端电性连接无线传输器3,可将视频信息传送至云端控制中心,同时使用者可以通过手机或者移动电脑随时随地的调取视频信息。
[0035]
进一步的,壳体沿中心线对称开设两个安装孔,安装孔内设有缓冲弹簧,缓冲弹簧一端固定安装升降杆12,升降杆12电性连接控制主机11,升降杆12一端固定安装防撞板13。
[0036]
在本实施方式中,由于避障小车的避障工功能为同一水平线的避障,当侧方被撞击时,无论对车身还是车内人员都会造成较大的损害,小车启动时,升降杆12将推动防撞板13,使防撞板13位于小车两侧,当侧方被撞击时,撞击物体挤压防撞板13,通过在升降杆12一端设有缓冲弹簧,可以大幅度的减轻撞击力度,提高了小车的安全性能。
[0037]
进一步的,壳体一端固定安装鸣笛器9,鸣笛器9电性连接控制主机11,壳体一端固定安装警示灯10,警示灯10电性连接控制主机11。
[0038]
在本实施方式中,当控制主机11接收到障碍物信息后,启动警示灯10与鸣笛器9,警示灯10闪烁以及鸣笛器9发出鸣笛警报,用以提醒前方人为控制的障碍物,进一步提高了小车的安全性。
[0039]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips