
 商标分类
商标分类  商标转让
商标转让 
电动车辆及其能量回收控制系统、稳定控制方法和介质与流程
 2021-02-03 15:02:56|
2021-02-03 15:02:56| 304|
304| 起点商标网
起点商标网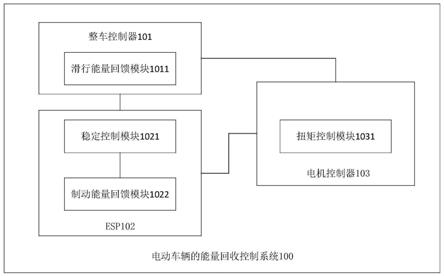
[0001]
本发明涉及车辆技术领域,具体涉及一种电动车辆的能量回收控制系统、一种电动车辆能量回收时的稳定控制方法、一种计算机可读存储介质和一种电动车辆。
背景技术:
[0002]
为了提高电动车辆的续航能力,已有滑行能量回收和制动能量回收同时应用在电动车辆的方案。正常情况下,滑行能量回收是由整车控制器控制,制动能量回收是由esp(electronic stability program,车身稳定控制系统)控制。但是,当电动车辆进行滑行能量回收时,踩下制动踏板,制动能量回收介入,滑行能量回收退出,导致滑行能量回收扭矩突变,从而导致电动车辆产生顿挫感,控制效果较差,降低舒适性体验。
[0003]
为解决扭矩突然变化的问题,相关技术中采用一个控制器对扭矩进行统筹计算叠加的方案,如由车身稳定控制系统esp控制整个能量回收策略,即滑行回收与制动回收均由esp进行控制。具体地,在滑行过程中,整车控制器先把滑行扭矩发送至esp,esp根据车身稳定情况把扭矩过滤后再发送给整车控制器进行能量回收。当只有制动能量回收时,esp经过运算后直接把扭矩发给整车控制器,整车控制器直接进行制动能量回收。当进行滑行能量回收时,若制动能量回收介入,esp则进行逻辑处理,把滑行能量回收的值与制动能量回收的值进行叠加处理,然后发送给整车控制器,由整车控制器进行扭矩能量回收。
[0004]
但是,上述方案中整个能量回收策略均由esp控制,所以会相应增加esp的开发工时和开发成本。
技术实现要素:
[0005]
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种电动车辆的能量回收控制系统,以对滑行能量回收过程中,因制动能量回收介入造成的不舒适性进行控制,从而提升能量回收过程中的舒适性,并有效降低了系统的开发工时和开发成本。
[0006]
本发明的第二个目的在于提出一种电动车辆。
[0007]
本发明的第三个目的在于提出一种电动车辆能量回收时的稳定控制方法。
[0008]
本发明的第四个目的在于提出一种计算机可读存储介质。
[0009]
为达到上述目的,本发明第一方面实施例提出了一种电动车辆的能量回收控制系统,包括整车控制器、车身稳定控制系统esp和电机控制器,
[0010]
所述整车控制器中集成滑行能量回馈模块,所述滑行能量回馈模块用于在所述电动车辆滑行时获取滑行能量回馈值;所述esp集成稳定控制模块和制动能量回馈模块,所述制动能量回馈模块用于在所述电动车辆制动时获取制动能量回馈值,所述稳定控制模块用于获取所述电动车辆的滑移率,并根据所述电动车辆的滑移率监控车辆状态;所述电机控制器集成扭矩控制模块,所述扭矩控制模块用于响应所述电机控制器接收到的扭矩请求;
[0011]
其中,所述稳定控制模块根据所述车辆状态确定所述电动车辆在滑行能量回收过
程中和/或制动能量回收过程中出现失稳时计算扭矩回馈值,并通过所述esp与所述电机控制器之间的通信连接将所述扭矩回馈值发送给所述电机控制器,以便所述扭矩控制模块仅响应所述稳定控制模块的扭矩请求。
[0012]
根据本发明实施例的电动车辆的能量回收控制系统,当电动车辆在滑行能量回收过程中和/或制动能量回收过程中出现失稳时,通过稳定控制模块计算扭矩回馈值,并通过esp与电机控制器之间的通信连接将所述扭矩回馈值发送至电机控制器,以使扭矩控制模块仅响应稳定控制模块的扭矩请求,从而可对滑行能量回收过程中,因制动能量回收介入造成的不舒适性进行控制,进而提升了能量回收过程中的舒适性,并有效降低了系统的开发工时和开发成本。
[0013]
为达到上述目的,本发明第二方面实施例提出了一种电动车辆,包括上述所述的电动车辆的能量回收控制系统。
[0014]
根据本发明实施例的电动车辆,可通过电动车辆的能量回收控制系统对滑行能量回收过程中,因制动能量回收介入造成的不舒适性进行控制,从而提升了能量回收过程中的舒适性,并有效降低了系统的开发工时和开发成本。
[0015]
为达到上述目的,本发明第三方面实施例提出了一种电动车辆能量回收时的稳定控制方法,包括:获取所述电动车辆的滑移率,并根据所述电动车辆的滑移率监控车辆状态;根据所述车辆状态确定所述电动车辆在滑行能量回收过程中和/或制动能量回收过程中是否出现失稳;在确定所述电动车辆出现失稳时计算扭矩回馈值,并根据所述扭矩回馈值响应车身稳定控制系统esp中稳定控制模块的扭矩请求。
[0016]
根据本发明实施例的电动车辆能量回收时的稳定控制方法,当确定电动车辆在滑行能量回收过程中和/或制动能量回收过程中出现失稳时,可对扭矩回馈值进行计算,并根据扭矩回馈值响应车身稳定控制系统esp中稳定控制模块的扭矩请求,从而可对滑行能量回收过程中,因制动能量回收介入造成的不舒适性进行控制,进而提升了能量回收过程中的舒适性,并有效降低了系统的开发工时和开发成本。
[0017]
为达到上述目的,本发明第四方面实施例提出了一种计算机可读存储介质,其上存储有电动车辆能量回收时的稳定控制程序,该稳定控制程序被处理器执行时实现上述所述的电动车辆能量回收时的稳定控制方法。
[0018]
根据本发明实施例的计算机可读存储介质,其上存储的电动车辆能量回收时的稳定控制程序被处理器执行时,可对滑行能量回收过程中,因制动能量回收介入造成的不舒适性进行控制,从而提升了能量回收过程中的舒适性,并有效降低了系统的开发工时和开发成本。
[0019]
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0020]
图1为根据本发明一个实施例的电动车辆的能量回收控制系统的结构框图;
[0021]
图2为根据本发明一个具体示例的电动车辆的能量回收控制系统的工作流程图;
[0022]
图3为根据本发明一个具体示例的电动车辆的能量回收控制系统的交互示意图;
[0023]
图4为根据本发明一个实施例的电动车辆的结构框图;
[0024]
图5为根据本发明一个实施例的电动车辆能量回收时的稳定控制方法的流程图。
具体实施方式
[0025]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0026]
下面参考附图1-5描述本发明实施例的电动车辆及其能量回收控制系统、稳定控制方法和介质。
[0027]
图1为根据本发明一个实施例的电动车辆的能量回收控制系统的结构框图。参考图1所示,电动车辆的能量回收控制系统100包括整车控制器101、车身稳定控制系统esp102和电机控制器103。
[0028]
其中,整车控制器101中集成滑行能量回馈模块1011,滑行能量回馈模块1011用于在电动车辆滑行时获取滑行能量回馈值。
[0029]
esp102集成稳定控制模块1021和制动能量回馈模块1022,制动能量回馈模块1022用于在电动车辆制动时获取制动能量回馈值,稳定控制模块1021用于获取电动车辆的滑移率,并根据电动车辆的滑移率监控车辆状态。
[0030]
电机控制器103集成扭矩控制模块1031,扭矩控制模块1031用于响应电机控制器103接收到的扭矩请求。
[0031]
其中,稳定控制模块1021根据车辆状态确定电动车辆在滑行能量回收过程中和/或制动能量回收过程中出现失稳时计算扭矩回馈值,并通过esp102与电机控制器103之间的通信连接将扭矩回馈值发送给电机控制器103,以便扭矩控制模块1031仅响应稳定控制模块1021的扭矩请求。
[0032]
具体地,当只有滑行能量回收或制动能量回收时,稳定控制模块1021可获取电动车辆的滑移率,并根据电动车辆的滑移率监控电动车辆的状态。
[0033]
需要说明的是,电动车辆的滑移率一般控制在10%-30%之间,当车轮滑移率处于15%-20%范围时,车轮附着系数如纵向附着系数和横向附着系数可达到最大值,车轮相对路面的附着力较大,电动车辆的车身状态也相应越稳定。当电动车辆的滑移率大于30%且一直增大时,车轮的附着系数会急剧减小,车轮相对路面的附着力减小,电动车辆的车身状态将处于失稳状态。
[0034]
参考图1所示,如果根据电动车辆的状态判定电动车辆失稳,则由稳定控制模块1021计算扭矩回馈值,并通过esp102与电机控制器103之间的通信连接将扭矩回馈值发送给电机控制器103,以便扭矩控制模块1031仅响应稳定控制模块1021的扭矩请求。由此,可对电动车辆的失稳进行有效控制,提升电动车辆的舒适性。
[0035]
在本发明的一个实施例中,在只有滑行能量回收时,参考图2所示,整车控制器101可先判断滑行能量回馈模块1011是否触发,若触发,则可通过滑行能量回馈模块1011获取滑行能量回馈值。如果稳定控制模块1021根据电动车辆的状态判定电动车辆未失稳,则在只有滑行能量回收时,如图1所示,滑行能量回馈模块1011可通过整车控制器101与电机控制器103之间的通信连接将滑行能量回馈值发送给电机控制器103,以便扭矩控制模块1031仅响应滑行能量回馈模块1011的扭矩请求。由此,可保证滑行能量的有效回收。
[0036]
在本发明的另一个实施例中,在只有制动能量回收时,参考图2所示,esp102可判断制动能量回馈模块1022是否触发。若制动能量回馈模块1022触发,则可通过制动能量回馈模块1022获取制动能量回馈值。稳定控制模块1021如果根据电动车辆的状态判定电动车辆未失稳,则在只有制动能量回收时,如图1所示,制动能量回馈模块1022可通过esp102与电机控制器103之间的通信连接将制动能量回馈值发送给电机控制器103,以便扭矩控制模块仅响应制动能量回馈模块1022的扭矩请求。由此,可保证制动能量的有效回收。
[0037]
在本发明的又一个实施例中,当滑行能量回收和制动能量回收同时进行时,参考图2所示,esp102可判断abs(antilock brake system,制动防抱死系统)、vdc(vehicle dynamics control,车辆动态控制系统)、cdd(complex device drivers,复杂驱动系统)、apa(auto parking assist,自动泊车辅助系统)和rpa(parking assist system,倒车辅助系统)等电动车辆辅助系统的工作状态。
[0038]
作为一个示例,当踩踏加速踏板时,abs或vdc触发,esp102可向整车控制器101发送abs或vdc的工作状态,例如esp102检测到abs的工作状态标志位absworkstas或vdc的工作状态标志位vdcwokstas为1时,则表明abs或vdc触发,并如图3所示,向整车控制器101发送absworkstas或vdcwokstas。由于abs或vdc为单轮控制,而滑行能量回收为整轴控制,所以在abs或vdc触发的前提下,进行滑行能量回收,会影响车辆的稳定性。因此,在整车控制器101接收到esp102发送的absworkstas或vdcwokstas之后,可控制滑行能量回收退出,直至下次踩踏加速踏板之后,控制滑行能量回收介入。
[0039]
作为另一个示例,当电动车辆的辅助系统apa和/或rpa和/或cdd触发时,如esp102检测到cddworkstas为1,则向整车控制器101发送cddworkstas,整车控制器101接收后,控制滑行能量回收退出,并触发crbs(cooperative regenerative braking system,协作式再生制动系统)实现电动车辆的减速。
[0040]
crbs触发后,如图3所示,esp102发送crbs的扭矩请求和对应的扭矩值。整车控制器101接收到该扭矩请求和对应扭矩值后,将该值和滑行能量回收的值进行叠加,并向esp102发送电机当前响应crbs的回收扭矩和电机能给crbs提供的最大回收扭矩,其中电机当前响应crbs的回收扭矩和电机能给crbs提供的最大回收扭矩均不包含滑行能量回收值。
[0041]
在本发明的一个示例中,整车控制器101还可向esp102发送当前的实际扭矩,其中扭矩为正表示驱动,扭矩为负表示能量回收。当esp102检测到dtc(dynamic tractive control,动力牵引控制)系统触发时,如检测到标志前轴dtc触发的标志位fmcutorqincreareqvldty为1或者标志后轴dtc触发的标志位rmcutorqincreareqvldty为1,则向整车控制器101发送dtc的工作状态和dtc扭矩请求。整车控制器101响应dtc扭矩请求,其中dtc负扭矩请求可实现滑行能量回收的效果。当然,整车控制器101也可主动向esp102发送滑行能量回收的请求,以请求退出dtc系统,使得滑行能量回收由整车控制器101进行控制。
[0042]
进一步地,当滑行能量回收和制动能量回收同时进行时,如果稳定控制模块1021根据电动车辆的状态判定电动车辆失稳,如图2所示,整车控制器101和esp102则分别控制滑行能量回收和制动能量回收退出,然后由稳定控制模块1021计算扭矩回馈值,并向电机控制器103发送,以便扭矩控制模块1031仅响应稳定控制模块1021的扭矩请求。
[0043]
当电动车辆在滑行能量回收过程和制动能量回收过程同时介入且未出现失稳时,
滑行能量回馈模块1011通过整车控制器101与电机控制器103之间的通信连接将滑行能量回馈值发送给电机控制器103,且制动能量回馈模块1022通过esp102与电机控制器103之间的通信连接将制动能量回馈值发送给电机控制器103,以便扭矩控制模块1031同时响应滑行能量回馈模块1011的扭矩请求和制动能量回馈模块1022的扭矩请求。当然,如图2所示,滑行能量回馈模块1011和制动能量回馈模块1022也可分别将滑行能量回馈值和制动能量回馈值发送给整车控制器,由整车控制器进行叠加后,发送给电机控制器103。
[0044]
根据本发明实施例的电动车辆的能量回收控制系统,当电动车辆在滑行能量回收过程中和/或制动能量回收过程中出现失稳时,通过稳定控制模块计算扭矩回馈值,并通过esp与电机控制器之间的通信连接将所述扭矩回馈值发送至电机控制器,以使扭矩控制模块仅响应稳定控制模块的扭矩请求,从而可对滑行能量回收过程中,因制动能量回收介入造成的不舒适性进行控制,进而提升了能量回收过程中的舒适性,并有效降低了系统的开发工时和开发成本。
[0045]
进一步地,本发明还提出了一种电动车辆。参考图4所示,电动车辆1000包括上述所述的电动车辆的能量回收控制系统100。
[0046]
根据本发明实施例的电动车辆,可通过电动车辆的能量回收控制系统对滑行能量回收过程中,因制动能量回收介入造成的不舒适性进行控制,从而提升了能量回收过程中的舒适性,并有效降低了系统的开发工时和开发成本。
[0047]
图5为根据本发明一个实施例的电动车辆能量回收时的稳定控制方法的流程图。如图5所示,该稳定控制方法包括:
[0048]
s101,获取电动车辆的滑移率,并根据电动车辆的滑移率监控车辆状态。
[0049]
s102,根据车辆状态确定电动车辆在滑行能量回收过程中和/或制动能量回收过程中是否出现失稳。
[0050]
s103,在确定电动车辆出现失稳时计算扭矩回馈值,并根据扭矩回馈值响应车身稳定控制系统esp中稳定控制模块的扭矩请求。
[0051]
在本发明的一个实施例中,当电动车辆在滑行能量回收过程中未出现失稳时,电机控制器中的扭矩控制模块可根据电动车辆滑行时的滑行能量回馈值响应整车控制器中滑行能量回馈模块的扭矩请求。
[0052]
在本发明的一个实施例中,当电动车辆在制动能量回收过程中未出现失稳时,电机控制器中的扭矩控制模块可根据电动车辆制动时的制动能量回馈值响应esp中制动能量回馈模块的扭矩请求。
[0053]
在本发明的一个实施例中,电动车辆在滑行能量回收过程和制动能量回收过程同时介入且未出现失稳时,扭矩控制模块可将电动车辆制动时的制动能量回馈值和电动车辆滑行时的滑行能量回馈值进行叠加,以便同时响应整车控制器中滑行能量回馈模块的扭矩请求和esp中制动能量回馈模块的扭矩请求。
[0054]
根据本发明实施例的电动车辆能量回收时的稳定控制方法,当确定电动车辆在滑行能量回收过程中和/或制动能量回收过程中出现失稳时,可对扭矩回馈值进行计算,并根据扭矩回馈值响应车身稳定控制系统esp中稳定控制模块的扭矩请求,从而可对滑行能量回收过程中,因制动能量回收介入造成的不舒适性进行控制,进而提升了能量回收过程中的舒适性,并有效降低了系统的开发工时和开发成本。
[0055]
进一步地,本发明还提出了一种计算机可读存储介质,其上存储有电动车辆能量回收时的稳定控制程序,该稳定控制程序被处理器执行时实现上述所述的电动车辆能量回收时的稳定控制方法。
[0056]
根据本发明实施例的计算机可读存储介质,其上存储的电动车辆能量回收时的稳定控制程序被处理器执行时,可对滑行能量回收过程中,因制动能量回收介入造成的不舒适性进行控制,从而提升了能量回收过程中的舒适性,并有效降低了系统的开发工时和开发成本。
[0057]
需要说明的是,在流程图中表示或在此以其他方式描述的逻辑和/或步骤,例如,可以被认为是用于实现逻辑功能的可执行指令的定序列表,可以具体实现在任何计算机可读介质中,以供指令执行系统、装置或设备(如基于计算机的系统、包括处理器的系统或其他可以从指令执行系统、装置或设备取指令并执行指令的系统)使用,或结合这些指令执行系统、装置或设备而使用。就本说明书而言,"计算机可读介质"可以是任何可以包含、存储、通信、传播或传输程序以供指令执行系统、装置或设备或结合这些指令执行系统、装置或设备而使用的装置。计算机可读介质的更具体的示例(非穷尽性列表)包括以下:具有一个或多个布线的电连接部(电子装置),便携式计算机盘盒(磁装置),随机存取存储器(ram),只读存储器(rom),可擦除可编辑只读存储器(eprom或闪速存储器),光纤装置,以及便携式光盘只读存储器(cdrom)。另外,计算机可读介质甚至可以是可在其上打印所述程序的纸或其他合适的介质,因为可以例如通过对纸或其他介质进行光学扫描,接着进行编辑、解译或必要时以其他合适方式进行处理来以电子方式获得所述程序,然后将其存储在计算机存储器中。
[0058]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0059]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0060]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0061]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips