
 商标分类
商标分类  商标转让
商标转让 
用于控制旋转电机以补偿机动车辆牵引链的扭矩振荡的方法与流程
 2021-02-03 15:02:11|
2021-02-03 15:02:11| 248|
248| 起点商标网
起点商标网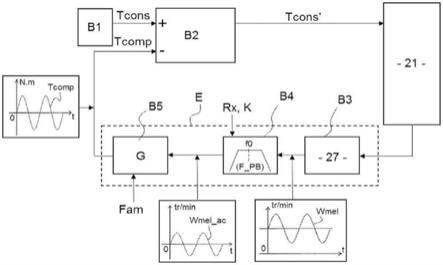
[0001]
本发明涉及一种用于控制旋转电机以补偿机动车辆牵引链的扭矩振荡的方法。
背景技术:
[0002]
在已知方式中,机动车辆的牵引链包括热力发动机,该热力发动机借助于离合器耦合至齿轮箱。位于齿轮箱输出端的驱动轴借助于差速齿轮和万向节与车轮机械地连接。
[0003]
已知使用可逆电机耦合至齿轮箱。此混合系统允许车辆以组合的方式或独立地使用与电机和热力发动机关联的多种功能。因此,特别地,电机能够单独地或与热力发动机组合地以电动机模式运行,以确保牵引车辆。电机还能够确保热力发动机的启动。此电机还能够以发电机模式运行,以便(特别是在恢复制动阶段期间)向车辆的电池供电。
[0004]
在纯电动行驶阶段,通过打开离合器,热力发动机被关闭并与动力传动系的其余部分解耦合。然后,电机被指令并经由齿轮箱的比率之一来向车轮提供扭矩。
[0005]
由于运动链(主要是驱动轴和万向节)的扭转刚度,因此在高设定点的扭矩梯度下,观察到扭矩振荡以及车辆的明显晃动。实际上,该组件充当质量弹簧类型的系统,其共振频率取决于接合的齿轮箱的速度。
[0006]
根据本申请,参考了接合的齿轮箱(第一、第二、第三等)以及对应于这些齿轮中的每一个的减速比(3、3、1、9、1、3等)。接合的最小齿轮提供最大的减速比。
技术实现要素:
[0007]
本发明的目的是通过提出一种用于控制包含在机动车辆牵引链中的旋转电机的方法来有效地消除此缺点,该牵引链包括热力发动机,该热力发动机借助于离合器连接至齿轮箱,该旋转电机耦合至齿轮箱,
[0008]
其特征在于,当打开离合器并且旋转电机以电动机模式运行以确保机动车辆的电动行驶时,方法包括:
[0009]-生成对应于驾驶员的加速期望的设定点扭矩的步骤;
[0010]-确定脉冲扭矩以补偿由牵引链产生的扭矩振荡的步骤;
[0011]-组合设定点扭矩和预先确定的脉冲补偿扭矩以获得最终的修正设定点扭矩的步骤;以及
[0012]-将最终的修正设定点扭矩应用于旋转电机的步骤。
[0013]
因此,本发明使得可能减小或甚至消除在电动机模式下机动车辆行驶期间的扭矩振荡,并因此增加了乘客的舒适度。本发明还具有经济性质,这在于其能够至少部分地借助于软件实施来实现。本发明是有效的。
[0014]
要衰减的振荡是由于缺乏来自热力发动机的自然阻尼而产生的,特别是与当发动机连接到驱动链的其余部分时而在其中产生的内部摩擦有关。这些振荡的幅度和频率和与热力发动机关联的振荡非常不同。
[0015]
电机能在扭矩传递到车辆车轮的方向上并入在离合器下游的所谓的热力驱动链
中。电机能被并入在离合器和齿轮箱之间。电机能被并入到齿轮箱中。特别地,电机能连接在位置2、5处。因此,电机连接到齿轮箱的偶数比率或者奇数比率。电机能被并入在齿轮箱和车辆的车轮之间。
[0016]
作为变型,电机能被并入在除了热力驱动链之外的驱动链中,例如在车辆的车轮中,或者能被装配在未连接至热力驱动链的车轴上。
[0017]
根据一个实施例,脉冲补偿扭矩取决于减速比和牵引链的刚度。具体地,脉冲补偿扭矩的幅度和相位是相关的,这使得可以更精确地调节补偿。
[0018]
根据一个实施例,为了确定脉冲补偿扭矩,该方法包括:
[0019]-测量旋转电机的旋转速度以获得速度信号的步骤;
[0020]-提取速度信号的替代分量的步骤;以及
[0021]-将增益应用于该速度信号的替代分量的步骤。
[0022]
根据一个实施例,通过将通带滤波器应用于速度信号来进行提取速度信号的替代分量的步骤,带通滤波器具有对应于扭矩振荡频率的中心频率。中心频率可以包含在5至13hz的范围内。滤波器的频率能够取决于接合的传动比。滤波器的中心频率能包含在扭矩振荡频率
±
15%的中心值范围内。
[0023]
根据一个实施例,增益取决于所需的阻尼系数。
[0024]
根据一个实施例,阻尼系数是预先确定的或者取决于机动车辆的驱动模式。阻尼系数可以包含在0.25至0.7的范围内。
[0025]
根据一个实施例,脉冲补偿扭矩相对于牵引链的扭矩振荡以相反的相位被注入。
[0026]
根据一个实施例,该方法包括通过应用预滤波器来限制设定点扭矩中扭矩变化的先前步骤。该预滤波器具有预防作用,这在于要衰减的扭矩振荡可能不太明显,因此较难补偿。
[0027]
定义该预滤波器以使得切断固定分量和/或使得切断高频,并使得允许与电机的驱动链的刚度相关联的频率通过。
[0028]
根据一个实施例,预滤波器是斜坡。
[0029]
根据一个实施例,预滤波器是n阶滤波器,特别是2阶滤波器,特别是3阶滤波器。
[0030]
根据一个实施例,齿轮箱能是手动齿轮箱或者dct齿轮箱。
[0031]
根据本发明的一种实施方式,该补偿方法能由车辆的使用者启动和关闭。
[0032]
本发明还涉及一种旋转电机的控制模块,其特征在于,该控制模块包括存储器,该存储器存储用于实施前述方法的软件指令。
附图说明
[0033]
通过阅读以下描述并查看随附的附图,将会更好地理解本发明。这些附图仅以示例说明的方式提供,而并不限制本发明。
[0034]
图1是实施根据本发明用于补偿电机的扭矩振荡方法的机动车辆牵引链的示意图;
[0035]
图2是电机与齿轮箱之间的耦合的详细示意图;
[0036]
图3是在控制模块中实施的功能块的示意图,控制模块用于实施根据本发明的补偿由牵引链产生的扭矩振荡的方法;
[0037]
图4a和4b是分别在实施和不实施根据本发明方法的情况下获得的、以时间为基础的设定点扭矩、车轮上的扭矩、车轮和电机的旋转速度的图形表示;
[0038]
图5示出了根据本发明的方法的变型实施例,其包括用于设定点截止的预先预防性滤波步骤;
[0039]
图6a和6b是示出分别将斜坡类型滤波器和一阶滤波器应用于设定点扭矩情况下车轮上的扭矩峰值衰减的图形表示。
[0040]
相同、相似或类似的元素从一个附图到另一附图含义相同。
具体实施方式
[0041]
图1示出了机动车辆的牵引链10,其包括通过离合器13耦合至齿轮箱12的热力发动机11。齿轮箱12的输出驱动轴15通过差速齿轮18和万向节20机械地连接至车轮16。
[0042]
可逆电机21耦合至齿轮箱12。此混合系统允许车辆以组合的方式或独立地使用与电机21和热力发动机11关联的多种功能。因此,电机21能够单独地或与热力发动机11组合地以电动机模式运行,以确保牵引车辆。离合器13在车辆的电动行驶阶段是打开的,在车辆的热力行驶阶段是闭合的。电机21还能够确保热力发动机11的启动。此电机21还能够以发电机模式运行,以便(特别是在恢复制动阶段期间)向车辆的电池供电。
[0043]
有利地,电机21是连接到具有48v工作电压的电网的同步双三相类型电机。电机21能够具有15kw至25kw之间的功率,并且能够提供特别是包含在55nm至80nm的范围内的扭矩,这取决于其长度。
[0044]
图2示出了电机21与包括多个传动比r1-rn的齿轮箱12之间的耦合的示例。在所示的示例中,比率n的数值是7,但是可以理解的是,这可以根据应用进行调整。第一轴23与奇数比率关联,第二轴24与偶数比率关联。双离合器系统13使得可能根据接合的比率旋转地连接这些轴23、24或者释放它们。旋转电机21经由减速器25耦合到齿轮箱12。在这种情形下,电机21耦合到第二轴24。电机21能够植入在齿轮箱12的内部或外部。
[0045]
参考图3,在下文中提供了对不同功能块的描述,这些功能块允许实施用于补偿在电动行驶阶段(即当离合器13打开时)以及旋转电机21以电动机模式运行以确保牵引机动车辆的情形下、由牵引链10产生的扭矩波动的方法。不同的功能块能够是存储在旋转电机21的控制模块22的存储器中的软件指令的形式。
[0046]
更具体地,块b1生成对应于驾驶员的加速期望的设定点扭矩tcons,特别是通过按下车辆的加速踏板来限定。
[0047]
功能块的集合e确定脉冲补偿扭矩tcomp,以便补偿由牵引链10产生的扭矩振荡tosc。块b2组合设定点扭矩tcons和先前确定的脉冲补偿扭矩tcomp,以获得最终的修正设定点扭矩tcons'。然后,将最终的修正设定点扭矩tcons
′
应用于旋转电机21,并且因此应用于牵引链10。
[0048]
为了确定脉冲补偿扭矩tcomp,经由块23借助于速度传感器27来测量电机21的旋转速度。因此,在块b3的输出处提供了速度信号wmel。速度传感器27例如是霍尔效应传感器。
[0049]
然后,经由块b4通过应用通带滤波器f_pb来提取速度信号的替代分量wmel_ac。该带通滤波器f_pb具有对应于扭矩振荡tosc的频率的中心频率f0。滤波器的中心频率f0取决
于接合的速率比rx和牵引链10的刚度k。例如,能够通过引擎计算机接收接合的齿轮箱比率rx作为输入而借助于制图获得中心频率f0。
[0050]
然后,块b5将增益g应用于滤波后的速度信号wmel_ac。增益g取决于所需的阻尼系数fam。阻尼系数fam是预先确定的或者取决于机动车辆的驱动模式。阻尼系数fam越大,扭矩振荡tosc的衰减时间越短。
[0051]
通过块b2,脉冲补偿扭矩tcomp相对于牵引链10的扭矩振荡tosc以相反的相位被注入。
[0052]
图4a是在不实施根据本发明的方法的情况下获得的、以时间为基础的设定点扭矩tcons、车轮上的扭矩tr、车轮旋转速度wr以及电机旋转速度wmel的图形表示。
[0053]
图4b是实施根据本发明的方法的情况下获得的、以时间为基础的设定点扭矩tcons(并入脉冲补偿扭矩tcomp的最终的修正设定点扭矩tcons')、车轮上的扭矩tr、车轮旋转速度wr以及电机旋转速度wmel的图形表示。
[0054]
可以看出,由于本发明的实施,减弱了车轮上的扭矩波动tr,本发明将脉冲补偿扭矩tcomp并入到设定点扭矩tcons中。
[0055]
在图5的实施例中,该方法包括经由块b6应用预滤波器来限制设定点扭矩tcons中的扭矩变化的先前步骤。
[0056]
如图6a所示,预滤波器能是斜坡,使得可能获得滤波后的设定点扭矩tcons_f。瞬时扭矩变化的限制使得可能将车轮上的扭矩tr的峰值减小大约20%至25%。
[0057]
如图6b所示,预滤波器能是一阶滤波器,其将梯度引入到滤波后的设定点扭矩tcons_f,以及在“起飞”(即开始处)和“着陆”(即在设定点阶段的末尾)时的水平切线,因此,相比于斜坡类型的预滤波器,车轮上的扭矩振荡tr额外降低了10%。
[0058]
更一般地,预滤波器能是n阶滤波器。滤波器的阶数n越高,牵引链10自身模式承受的应力就越小。
[0059]
可以理解的是,以上描述仅以示例的方式提供,并不限制本发明的领域,通过任何其他等同来替换不同的元件,将不构成本发明的偏离。
[0060]
另外,本发明的不同特性、变型和/或实施例可以根据不同的组合彼此关联,只要它们不是不兼容或相互排斥即可。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips