
 商标分类
商标分类  商标转让
商标转让 
一种水陆两栖机器人的制作方法
 2021-02-03 14:02:01|
2021-02-03 14:02:01| 315|
315| 起点商标网
起点商标网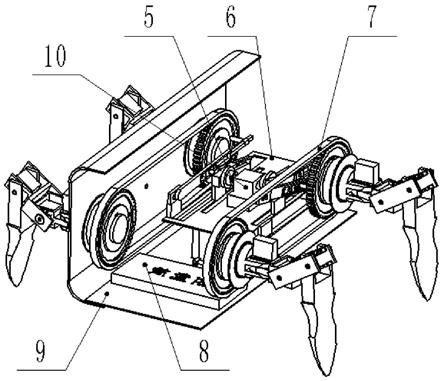
[0001]
本发明涉及机器人技术领域,更具体的说,尤其涉及一种水陆两栖机器人。
背景技术:
[0002]
近年来,机器人技术在各领域的应用得到不断地发展。操作式机器人可代替人员进行各种复杂的作业;移动式机器人可在陆地上进行地形勘察、地震救灾、运输物资等工作;水下机器人可在水中完成一系列作业。
[0003]
水陆两栖机器人结合了移动式机器人与水下机器人,既可在陆地上行走又可在水中游动,能够实现在两种不同环境的快速切换,可达到持续地工作。
[0004]
申请号为201510157435.1的中国发明专利公开了一种可变形结构的水陆两栖机器人,通过舵机的转向来实现两种模式的切换,并且在车轮上内嵌螺旋桨为机器人在水面航行提供推力;申请号为201310480381.3的中国发明专利公开了新型水陆两栖行走机构,利用离合器装置来使车轮内的螺旋叶片伸出展开,实现水陆的切换;申请号为200910222487.7中国发明专利公开了一种基于轮桨-足板混合驱动的水陆两栖机器人,可切换使用轮桨驱动和足板驱动这两种不同运动机理的驱动装置来实现水陆环境中的工作。但是,上述发明专利均采用水中螺旋桨推动的方式,导致推力不高,且易被水中杂质缠住而损坏机体;而且也存在着切换操作复杂等问题。
[0005]
针对上述不足,需要设计和开发一种新的水陆两栖机器人,能够补足上述不足。
技术实现要素:
[0006]
本发明的目的在于解决现有的水陆两栖机器人切换模式复杂,水中推力效率低等问题,提出了一种水陆两栖机器人,通过脚链既可在陆地上行走,又可在水中摆动而产生推力,从而达到快速切换模式,在水陆两种环境中持续稳定地工作。
[0007]
本发明通过以下技术方案来实现上述目的:一种水陆两栖机器人,包括机器人外壳、控制器、中间板、腿机构、双输出轴电机和复合曲柄摇杆滑块机构,所述控制器固定在机器人外壳的下底板上,中间板固定在所述机器人外壳的下底板上,双输出轴电机和复合曲柄摇杆滑块机构安装在中间板上,腿机构包括分布在机器人外壳两侧的四条行走腿,四条行走腿分别两条前侧腿和两条后侧腿,复合曲柄摇杆滑块机构连接设置在机器人外壳两侧的四条行走腿并驱动四条行走腿的运动;
[0008]
所述腿机构的四条行走腿的结构完全相同,所述行走腿包括支撑脚、上下舵机支架、前后舵机支架、旋转轴、腿部轴承座、腿部轴承、腿部连接键、第一舵机、第二舵机和第三舵机,所述上下舵机支架的一端与所述支撑脚通过第一铰接轴铰接且第一铰接轴固定在支撑脚上,所述第一舵机固定在上下舵机支架上且第一舵机的输出轴连接第一铰接轴;所述上下舵机支架的另一端与前后舵机支架的一端通过第二铰接轴铰接且第二铰接轴固定在上下舵机支架上,所述第二舵机固定在前后舵机支架上且第二舵机的输出轴连接第二铰接轴;所述前后舵机支架的另一端与旋转轴的一端通过第三铰接轴铰接且第三铰接轴固定在
前后舵机支架上,所述第三舵机固定在旋转轴上且第三舵机的输出轴连接第三铰接轴;所述旋转轴上套装有腿部轴承座,腿部轴承座和旋转轴通过腿部轴承连接,所述腿部轴承座的外侧固定在机器人外壳上;旋转轴的端部设置有用于连接齿轮传动装置的腿部连接键;
[0009]
所述复合曲柄摇杆滑块机构包括第一基座、第二基座、第一曲柄、第二曲柄、摇杆、第一滑块、第二滑块、第三滑块、主动轮、从动轮和同步带,所述第一基座和第二基座均固定在中间板上,双输出轴电机的输出轴通过轴承支撑在第一基座上,第一曲柄的一端固定在双输出轴电机的输出轴上,第一曲柄的另一端与第三滑块铰接,第二曲柄的一端设置有与第三滑块相配合的第一滑槽,第三滑块套装在第二曲柄的第一滑槽内;所述摇杆的一端铰接在第二基座上,所述主动轮靠近边缘的位置设置有平行于主动轮轴线设置的滑块铰接轴,第二滑块固定在滑块铰接轴的一端,摇杆的另一端设置有与第一滑块相配合的滑动杆,第二滑块套装在摇杆的滑动杆上;所述摇杆中部开设有与第一滑块相配合的第二滑槽,所述第二曲柄远离第一滑槽的一端铰接有第一滑块,第一滑块套装在摇杆的第二滑槽内;所述主动轮和从动轮通过同步带连接,主动轮固定安装在后侧腿的旋转轴上,从动轮固定安装在前侧腿的旋转轴上;双输出轴电机工作时驱动第一曲柄绕着双输出轴电机的输出轴转动,带动第三滑块在第二曲柄的第一滑槽内滑动,从而带动第二曲柄另一端的第一滑块在摇杆的第二滑槽内滑动,驱动主动轮来回摆动;
[0010]
所述复合曲柄摇杆滑块机构设置有左右对称的一对,两个复合曲柄摇杆滑块机构分别连接双输出轴电机的两根输出轴为四条行走腿提供行走动力。
[0011]
进一步的,所述机器人外壳包括前侧板、后侧板、左侧板、右侧板、上底板和下底板,前侧板、后侧板、左侧板、右侧板、上底板和下底板共同构成密封的机器人外壳。
[0012]
进一步的,所述上底板和下底板的结构完全相同,上底板和下底板平行设置,前侧板的上下两端分别固定在上底板和下底板的前侧,后侧板的上下两端分别固定在上底板和下底板的后侧,左侧板的上下两端分别固定在上底板和下底板的左侧,右侧板的上下两端分别固定在上底板和下底板的右侧;所述前侧板、后侧板、左侧板、右侧板均垂直于上底板和下底板安装。前侧板、后侧板、左侧板、右侧板与上底板和下底板的连接方式采用卡槽加螺栓的连接方式,并在连接处设置密封圈用于整体的密封;也可以采用除去上底板后一体成型的方式。
[0013]
进一步的,所述中间板通过均布在中间板底部的铜柱固定在机器人外壳的下底板上,所述中间板通过螺栓固定在铜柱上。
[0014]
进一步的,所述主动轮上设置有一个与主动轮的轮毂呈90度角的小孔。该小孔为滑块铰接轴的安装孔,滑块铰接轴套装在该小孔内。
[0015]
进一步的,所述主动轮和从动轮通过键固定在旋转轴上。
[0016]
本发明的有益效果在于:
[0017]
1、本发明的采用腿机构两用方式,既可在陆地上行走,又可在水中摆动提供推力,使机器人在水陆两种环境下可实现快速的切换,很好地解决了采用螺旋桨在水中易损坏的问题,无须装备额外的水下推进设备,工作适应性强、效率高,能够实现水陆环境的持续稳定工作。
[0018]
2、本发明在陆地行走模式时采用安装在支撑脚上的舵机进行驱动,水中游动模式时采用安装在机体内部的电机进行驱动,两种控制模式分工明确,不易耦合。
[0019]
3、本发明采用复合曲柄摇杆滑块机构只需控制电机单方向的旋转速度,无需控制电机的正反转,就能驱动支撑脚在一定范围内的上下摆动,进而控制机器人在水中的前进速度。
[0020]
4、本发明利用双输出轴电机以及同步带机构可实现单个电机控制4个支撑脚以相同的频率在水中进行摆动,使之运动方式规律有序,无需额外设计4个脚摆动的顺序方式。
附图说明
[0021]
图1是本发明一种水陆两栖机器人的整体结构示意图。
[0022]
图2是本发明一种水陆两栖机器人在水中的姿态。
[0023]
图3是本发明一种水陆两栖机器人内部结构图。
[0024]
图4是本发明腿机构的结构示意图。
[0025]
图5是本发明复合曲柄摇杆滑块机构的结构示意图。
[0026]
图6是本发明陆地行走结构示意图。
[0027]
图7是本发明水中游动初始状态结构示意图。
[0028]
图8是本发明水中游动时最大摆角结构示意图。
[0029]
图中,1-上侧板、2-腿机构、3-前侧板、4-右侧板、5-复合曲柄摇杆滑块机构、6-中间板、7-同步带、8-控制板、9-下底板、10-双输出轴电机、11-支撑脚、12-第一舵机、13-上下舵机支架、14-第二舵机、15-第三舵机、16-前后舵机支架、17-旋转轴、18-腿部轴承座、19-腿部轴承、20-腿部连接键、21-第二基座、22-摇杆、23-第一基座、24-第一滑块、25-主动轮。26-第二滑块、27-第二曲柄、28第一曲柄。
具体实施方式
[0030]
下面结合附图对本发明作进一步说明:
[0031]
如图1~8所示,一种水陆两栖机器人,其特征在于:包括机器人外壳、控制器8、中间板6、腿机构2、双输出轴电机10和复合曲柄摇杆滑块机构5,所述控制器8固定在机器人外壳的下底板9上,中间板6固定在所述机器人外壳的下底板9上,双输出轴电机10和复合曲柄摇杆滑块机构5安装在中间板6上,腿机构2包括分布在机器人外壳两侧的四条行走腿,四条行走腿分别两条前侧腿和两条后侧腿,复合曲柄摇杆滑块机构5连接设置在机器人外壳两侧的四条行走腿并驱动四条行走腿的运动。
[0032]
所述腿机构2的四条行走腿的结构完全相同,所述行走腿包括支撑脚11、上下舵机支架13、前后舵机支架16、旋转轴17、腿部轴承座18、腿部轴承19、腿部连接键20、第一舵机12、第二舵机14和第三舵机15,所述上下舵机支架13的一端与所述支撑脚11通过第一铰接轴铰接且第一铰接轴固定在支撑脚11上,所述第一舵机12固定在上下舵机支架13上且第一舵机12的输出轴连接第一铰接轴;所述上下舵机支架13的另一端与前后舵机支架16的一端通过第二铰接轴铰接且第二铰接轴固定在上下舵机支架13上,所述第二舵机14固定在前后舵机支架16上且第二舵机14的输出轴连接第二铰接轴;所述前后舵机支架16的另一端与旋转轴17的一端通过第三铰接轴铰接且第三铰接轴固定在前后舵机支架16上,所述第三舵机15固定在旋转轴17上且第三舵机15的输出轴连接第三铰接轴;所述旋转轴17上套装有腿部轴承座18,腿部轴承座18和旋转轴17通过腿部轴承19连接,所述腿部轴承座18的外侧固定
在机器人外壳上;旋转轴17的端部设置有用于连接齿轮传动装置的腿部连接键20。
[0033]
所述复合曲柄摇杆滑块机构5包括第一基座23、第二基座21、第一曲柄28、第二曲柄27、摇杆22、第一滑块24、第二滑块26、第三滑块、主动轮25、从动轮和同步带7,所述第一基座23和第二基座21均固定在中间板6上,双输出轴电机10的输出轴通过轴承支撑在第一基座23上,第一曲柄28的一端固定在双输出轴电机10的输出轴上,第一曲柄28的另一端与第三滑块铰接,第二曲柄27的一端设置有与第三滑块相配合的第一滑槽,第三滑块套装在第二曲柄27的第一滑槽内;所述摇杆22的一端铰接在第二基座21上,所述主动轮25靠近边缘的位置设置有平行于主动轮25轴线设置的滑块铰接轴,第二滑块26固定在滑块铰接轴的一端,摇杆22的另一端设置有与第一滑块24相配合的滑动杆,第二滑块26套装在摇杆22的滑动杆上;所述摇杆22中部开设有与第一滑块24相配合的第二滑槽,所述第二曲柄27远离第一滑槽的一端铰接有第一滑块24,第一滑块24套装在摇杆22的第二滑槽内;所述主动轮25和从动轮通过同步带7连接,主动轮25固定安装在后侧腿的旋转轴17上,从动轮固定安装在前侧腿的旋转轴17上;双输出轴电机10工作时驱动第一曲柄28绕着双输出轴电机10的输出轴转动,带动第三滑块在第二曲柄27的第一滑槽内滑动,从而带动第二曲柄27另一端的第一滑块24在摇杆22的第二滑槽内滑动,驱动主动轮25来回摆动。
[0034]
所述复合曲柄摇杆滑块机构5设置有左右对称的一对,两个复合曲柄摇杆滑块机构5分别连接双输出轴电机10的两根输出轴为四条行走腿提供行走动力。
[0035]
所述机器人外壳包括前侧板3、后侧板、左侧板、右侧板4、上底板1和下底板9,前侧板3、后侧板、左侧板、右侧板4、上底板1和下底板9共同构成密封的机器人外壳。
[0036]
所述上底板1和下底板9的结构完全相同,上底板1和下底板9平行设置,前侧板3的上下两端分别固定在上底板1和下底板9的前侧,后侧板的上下两端分别固定在上底板1和下底板9的后侧,左侧板的上下两端分别固定在上底板1和下底板9的左侧,右侧板4的上下两端分别固定在上底板1和下底板9的右侧;所述前侧板3、后侧板、左侧板、右侧板4均垂直于上底板1和下底板9安装。
[0037]
所述中间板6通过均布在中间板6底部的铜柱固定在机器人外壳的下底板9上,所述中间板6通过螺栓固定在铜柱上。
[0038]
所述主动轮25上设置有一个与主动轮25的轮毂呈90度角的小孔,所述主动轮25和从动轮通过键固定在旋转轴17上。
[0039]
本发明具有陆地移动模式和水中游动模式两种工作模式,具体工作过程如下:
[0040]
陆地移动模式时,如图6所示,当机器人腿机构2在程序的控制下,由第一舵机12和第二舵机14控制着机器人身体距离地面的高度同时控制着支撑脚11上下的翻转,第三舵机15的轴线垂直于地面,并控制着机器人前后行走方向。在此模式下,机器人的行走动力完全来自与每一个腿机构上的三个舵机,由它们控制着速度与方向。
[0041]
水中游动模式时,如图7~8所示,在此模式下,机器人腿机构2将呈现“l”型,并且内缩,此时舵机锁死;双输出轴电机10开始工作,带动复合曲柄摇杆滑块机构5转动,第一曲柄28做周转运动,而主动轮25做上下摆动运动;因主动轮25与腿机构2的旋转轴17连接,并通过键20传动力,从而带动腿机构2运动;并且主动轮25通过同步带7将相同的运动带到了同侧的另一个腿机构2上;这样,四个腿机构2的支撑脚11都在做相同的上下摆动运动,从而产生推力,使机器人在水中游动。
[0042]
上述实施例只是本发明的较佳实施例,并不是对本发明技术方案的限制,只要是不经过创造性劳动即可在上述实施例的基础上实现的技术方案,均应视为落入本发明专利的权利保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips