
 商标分类
商标分类  商标转让
商标转让 
座椅倾斜系统的制作方法
 2021-02-03 14:02:34|
2021-02-03 14:02:34| 296|
296| 起点商标网
起点商标网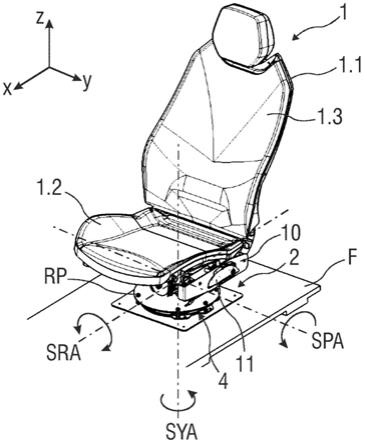
座椅倾斜系统
背景技术:
[0001]
本发明涉及一种用于倾斜座椅、特别是车辆座椅的座椅倾斜系统。本发明还涉及座椅和具有座椅的车辆。
[0002]
车辆座椅通常是可调节的,以使座椅的位置和/或人体工程学构造适应座椅乘员的需求。
技术实现要素:
[0003]
本发明的目的是提供一种改进的座椅倾斜系统,其用于调适座椅的位置,以提高座椅的舒适度。
[0004]
该目的通过根据权利要求1所述的座椅倾斜系统、通过根据权利要求12所述的座椅以及通过根据权利要求13所述的车辆来实现。
[0005]
根据本发明,座椅倾斜系统至少包括用于支撑和安装座椅的座椅支撑结构、限定参考平面的基础平台、以及相对于基础平台耦接座椅支撑结构的多个旋转致动器,其中至少第一旋转致动器被配置为使座椅支撑结构相对于基础平台围绕第一旋转轴线旋转,至少第二旋转致动器被配置为使座椅支撑结构相对于基础平台围绕第二旋转轴线旋转,至少第三旋转致动器被配置为使座椅支撑结构围绕垂直于参考平面的第三旋转轴线转动。
[0006]
根据本发明的座椅倾斜系统使座椅的定向可调节,以使座椅对于座椅的乘员而言更加舒适。特别地,座椅倾斜系统允许使车辆的车辆座椅的定向适应于车辆的驾驶操作,例如车辆的快速转弯,例如以使乘员在座椅中居中。另外,座椅倾斜系统可用于使乘员更容易进出车辆,并允许乘员到达舒适的位置放松。此外,座椅倾斜系统配置为增强自动驾驶车辆中的座椅功能,该功能将旋转功能与其他自由度结合在一起,以方便进出,并额外有助于使乘员的重力(g-forces)居中。
[0007]
此外,座椅倾斜系统被配置成使行动不便的人、例如老年人和大尺寸的个体受益。为此,座椅倾斜系统包括至少三个旋转致动器,以实现座椅的偏航、俯仰和侧倾运动。特别地,座位是基座座椅。
[0008]
此外,该座椅倾斜系统被配置为万向接头,该万向接头允许座椅经由旋转接头运动。这使得座椅能够由诸如倾斜器的核心产品构成,并且能够使座椅平稳地运动。
[0009]
在示例性实施例中,旋转致动器被布置在座椅支撑结构下方。这种布置使得旋转致动器能够以多个自由度的任意组合来调节座椅支撑结构,所述多个自由度包括相对于基础平台的偏航、俯仰和侧倾。
[0010]
根据另一个实施例,座椅倾斜系统可通过使用诸如操纵杆和/或空间球之类的独特控件来控制。附加地或可选地,可以自动控制座椅倾斜系统,以在驾驶时将乘员牢固地保持在座椅中。
[0011]
根据一个实施例,每个旋转致动器包括可以被配置为旋转倾斜器或棘轮倾斜器的倾斜器机构。特别地,倾斜器机构被配置为布置在相应旋转轴线上的摆动驱动机构。附加地或可选地,每个旋转致动器可包括枢转轴承、枢转配件和/或电动可调节配件中的至少一
个。
[0012]
根据另一个实施例,每个旋转致动器被布置和配置成以包括偏航、俯仰和侧倾的多个自由度的任意组合来调节座椅支撑结构。例如,每个旋转致动器可独立地和/或同时地可调节和可锁定在任何位置。因此,每个旋转致动器都是手动或动力驱动可调节的。例如,旋转致动器之一是侧倾旋转致动器。旋转致动器中的另一个是俯仰旋转致动器。此外,旋转致动器中的另一个是偏航旋转致动器。
[0013]
根据另一可能的实施例,第一旋转致动器基本上刚性地安装到座椅支撑结构。例如,第二旋转致动器基本上刚性地安装至基础平台。特别地,第三旋转致动器耦接至基础平台。座椅倾斜系统可在一个基座中提供偏航、俯仰和侧倾运动。偏航运动使整个座椅结构转动,而座椅可在任何方向上锁定,例如,在针对舒适性、交互性、进入或离开的自动驾驶车辆环境中。侧倾运动使整个座椅结构在乘员的h点(髋点)下方横向旋转,作为一种额外的运动,用于舒适性、交互性、进入或离开和/或自动驾驶车辆环境中的任何活动。俯仰运动可将整个座椅结构旋转到乘员的h点以下,并具有斜倚功能,使乘员可以更直立或更斜倚。
[0014]
在另一个可能的实施例中,至少第一旋转致动器可枢转地耦接到第二旋转致动器,使得当第二旋转致动器被致动时,第一旋转致动器相对于基础平台运动。可以减小安装空间,而第一和第二旋转致动器彼此相互作用,使得两个不同的旋转轴线通过旋转轴线的一个共同的中心点提供给座椅。这意味着旋转致动器可以布置成彼此尽可能靠近。
[0015]
根据一个实施例,至少第一旋转致动器和第二旋转致动器经由适配器彼此耦接。适配器尤其是立方体形、梯形、矩形或环形的。特别地,两个第一旋转致动器和两个第二旋转致动器成对安装在适配器的相反侧。由此,绕一个旋转轴线的每个旋转力由两个致动器补偿。此外,乘员的重力得到补偿和平衡。而且,每个旋转致动器都可以被弹簧加载。
[0016]
根据另一实施例,旋转致动器以其旋转轴线在基础平台的中心点相交的方式彼此布置。中心点,特别是枢转点/旋转点,被布置在座椅下方的安装空间的下方且靠近h点,以允许不会影响座椅的舒适性。可以同时或单独释放所有三个动作,即偏航、俯仰和侧倾。
[0017]
根据另一个可能的实施例,座椅支撑结构至少包括缓冲结构,该缓冲结构可以手动或动力驱动可调节以遵循乘员的大腿角度,其中该缓冲结构可锁定在任何成角度的位置。根据另一实施例,座椅的前部,特别是座椅的缓冲垫的前部可独立于座椅的旋转运动而倾斜和/或弯曲,以遵循乘员的大腿角度。替代地或附加地,座椅的整个缓冲垫是可倾斜的。例如,一个枢转点被布置在座椅下方,并且在乘员的h点稍微靠前的位置,在该位置乘员可以轻松地通过他/她的体重改变缓冲垫角度。
[0018]
在另一个实施例中,缓冲结构由基本柔性的材料制成。例如,缓冲结构包括泡沫材料和/或由任何柔性材料制成,因此缓冲垫的前部可以随着缓冲结构的前倾运动而弯曲。
[0019]
此外,本发明描述了一种座椅,特别是车辆座椅,其具有根据以上描述的座椅倾斜系统。
[0020]
此外,本发明描述了一种车辆,其具有这种座椅和用于使座椅倾斜的座椅倾斜系统。
[0021]
根据下文给出的详细描述,本发明的进一步应用范围将变得显而易见。然而,应该理解,详细说明和具体示例虽然指示了本发明的优选实施例,但是仅是通过举例说明的方式给出,因为根据该详细描述,本发明的精神和范围内的各种改变和修改对本领域技术人
员将变得显而易见。
附图说明
[0022]
从以下给出的详细描述和附图中,将仅对本发明进行更全面的理解,这些附图仅是为了举例说明而给出的,因此,不构成对本发明的限制,其中:
[0023]
图1示出了具有车辆座椅和座椅倾斜系统的车辆的截面,
[0024]
图2a和图2b分别示出了座椅和座椅倾斜系统的立体图和后视图,其中座椅处于第一位置,
[0025]
图3a至图3c分别示出了座椅的一部分和座椅倾斜系统的侧视图、立体图和后视图,其中座椅处于第一位置,
[0026]
图4a和图4b分别示出了座椅的一部分和座椅倾斜系统的侧视图,其中座椅处于不同的位置,
[0027]
图5a和5b分别示出了座椅和座椅倾斜系统的正视图,其中座椅处于不同位置,
[0028]
图6a至图6c分别示出了座椅和座椅倾斜系统的立体图,其中座椅处于不同位置,
[0029]
图7a至图7c分别示出了座椅倾斜系统的实施例的立体图,
[0030]
图8a至图8f分别示出了处于不同位置的座椅倾斜系统的实施例的侧视图,
[0031]
图9a至图9c分别示出了座椅倾斜系统的旋转致动器的倾斜器芯元件的实施例的立体图,
[0032]
图10示出了座椅的一部分和不具有盖的座椅倾斜系统的实施例的立体图,
[0033]
图11a至图11c示出了座椅的一部分和座椅倾斜系统的实施例的侧视图,其中座椅缓冲结构处于不同位置,
[0034]
图12示出了座椅缓冲结构的缓冲面板的实施例的立体图,以及
[0035]
图13a和图13b示出了座椅的所述部分和座椅倾斜系统的实施例的侧视图,其中座椅缓冲结构处于不同位置。
[0036]
在所有附图中,相应的部件都标有相同的附图标记。
具体实施方式
[0037]
图1示意性地示出了具有车辆座椅1的车辆v的截面图。座椅1包括用于将座椅1倾斜到各种位置的座椅倾斜系统2。
[0038]
为了更好地理解座椅1的后续描述,在另外的图中示出了坐标系。该坐标系包括相对于车辆v的纵轴x、横轴y和竖直轴z。
[0039]
座椅倾斜系统2包括用于将座椅1支撑和安装到例如车辆v的座椅支撑结构3。此外,座椅倾斜系统2包括安装至车辆v的车辆地板f的基础平台4。特别地,座椅支撑结构3相对于基础平台4耦接。
[0040]
图2a和图2b示出了座椅1和座椅倾斜系统2的立体图,其中座椅1处于第一位置。特别地,图2a以立体图示出了座椅1,而图2b以后视图示出了座椅1。
[0041]
例如,座椅1包括刚性座椅结构1.1,特别是座椅框架结构。座椅1包括座板1.2和靠背1.3。通过移动,特别是旋转/倾斜座椅1,座板1.2和靠背1.3一起移动。因此,座椅倾斜系统2的座椅支撑结构3刚性地耦接至座板1.2。例如,座椅支撑结构3包括图3c、图7a至图8a所
示的多个横管3.1。横管3.1安装至座板1.2的下侧。特别地,下侧面向基础平台4。
[0042]
特别地,座椅倾斜系统2布置在下方并安装到座板1.2。例如,座椅1是基座座椅。座椅倾斜系统2被配置为在座椅1和基础平台4之间的万向接头系统。
[0043]
座椅倾斜系统2被配置为围绕第一旋转轴线sra(特别是平行于座椅1的纵轴x的侧倾轴线)旋转/倾斜座椅1。此外,座椅倾斜系统2被配置为围绕第二旋转轴线spa(特别是平行于座椅1的横轴y的俯仰轴线)旋转/倾斜座椅1。此外,座椅倾斜系统2被配置为使座椅1围绕第三旋转轴线sya(特别是平行于车辆v的竖直轴z的偏航轴线)转动。
[0044]
特别地,基础平台4限定平行于坐标系的xy平面的参考平面rp,x轴从座椅1的后侧延伸到前侧。
[0045]
特别地,用于倾斜座椅1的座椅倾斜系统2至少包括用于支撑和安装座椅1的座椅支撑结构3、限定参考平面rp的基础平台4以及多个旋转致动器5至9(尤其在图9a中示出),所述旋转致动器相对于基础平台4耦接座椅支撑结构3,其中至少第一旋转致动器5、6被配置为使座椅支撑结构3相对于基础平台4围绕第一旋转轴线sra旋转,至少第二旋转致动器7、8被配置为使座椅支撑结构3相对于基础平台4围绕第二旋转轴线spa旋转,以及至少第三旋转致动器9被配置为使座椅支撑结构3围绕垂直于基础平台4的第三旋转轴线sya转动。在图9a至图9c的描述中更详细地描述了旋转致动器5至9。
[0046]
图3a示出了座椅1的一部分、特别是在座板部分中的以及座椅倾斜系统2的侧视图,其中座椅1处于第一位置。图3b示出了座椅1的该部分和座椅倾斜系统2的立体图,图3c示出了座椅1的该部分和座椅倾斜系统2的后视图。
[0047]
座椅倾斜系统2包括布置在座椅1下方的多个旋转致动器5至9。旋转致动器5至9布置成相对于基础平台4安装座椅1。
[0048]
第一旋转致动器5、6被配置为使座椅支撑结构3相对于基础平台4围绕第一旋转轴线sra旋转。第二旋转致动器7、8被配置为使座椅支撑结构3相对于基础平台4围绕第二旋转轴线spa旋转,其中仅示出了两个第二旋转致动器7、8之一。第三旋转致动器9被配置为使座椅支撑结构3围绕垂直于参考平面rp的第三旋转轴线sya旋转。
[0049]
特别地,两个第一旋转致动器5、6和两个第二旋转致动器7、8彼此成对相对地布置。第一旋转致动器5、6相反地布置在座椅1的后侧和前侧中。第二旋转致动器7、8相反地布置在座椅1的横向侧面中。第三旋转致动器9被布置在第一和第二旋转致动器5至8下方。
[0050]
特别地,座椅倾斜系统2被配置成与未进一步示出的乘员的h点hp(髋点)成一直线或接近成一直线旋转。这意味着,旋转致动器5至9以其相应的旋转轴线sra、spa、sya在中心点cp处彼此相交的方式布置。中心点cp,特别是枢转点/旋转点,被布置在座椅1下方的安装空间的下方且靠近h点hp的位置,以允许不影响座椅1的舒适性。座椅倾斜系统2在一个基座上提供偏航、俯仰和侧倾运动。每个旋转致动器5至9被布置和被配置为以包括偏航、俯仰和侧倾在内的多个自由度的任意组合来调节座椅支撑结构3。可以同时或单独释放所有三个运动。此外,每个旋转致动器5至9可锁定在座椅1的任何位置组合中。例如,每个旋转致动器5至9被弹簧加载。
[0051]
旋转致动器5至9分别是手动的或动力驱动可调节的。旋转致动器5至9中的每个包括倾斜器机构rm中的至少一个。例如,倾斜器机构rm被配置为旋转倾斜器或增量可调的倾斜器。特别地,倾斜器机构rm被配置为布置在相应的旋转轴线sra、spa、sya中的摆动驱动机
构。
[0052]
根据另一实施例,旋转致动器5至9分别被配置为枢转配件。附加地或可选地,旋转致动器5至9分别被配置为电动的(连续的)可调节的配件。
[0053]
第一旋转致动器5、6基本上刚性地安装到座椅支撑结构3。第二旋转致动器7、8基本上刚性地安装到基座平台4。第三旋转致动器9耦接到基座平台4。例如,基础平台4细分为上平台4.1和下平台4.2,而上平台4.1相对于下平台4.2可移动地,特别是可转动地安装。下平台4.2固定至车辆地板f。第三旋转致动器9布置在上平台4.1和下平台4.2之间。
[0054]
例如,第一旋转致动器5、6可枢转地耦接到第二旋转致动器7、8,使得当第二旋转致动器7、8被致动时,第一旋转致动器5、6相对于基础平台4运动,特别是转动。
[0055]
此外,座椅支撑结构3包括缓冲结构3.2,该缓冲结构被配置为随着乘员的大腿角度倾斜和/或弯曲。特别地,缓冲结构3.2可独立于座椅1的偏航、俯仰和侧倾运动或与之同时可调节。缓冲结构3.2是手动或动力驱动可调节的。例如,可倾斜和/或柔性缓冲结构3.2布置在前座板侧1.2.1处。特别地,缓冲结构3.2可锁定在任何成角度的位置。根据另一实施例,缓冲结构3.2被配置为缓冲面板3.3。例如,缓冲结构3.2由基本上柔性的材料制成。在另一实施例中,缓冲结构3.2可随乘员的大腿角度而自作用调节,而缓冲垫角度可通过重量压力移位。
[0056]
此外,座椅支撑结构3包括盖10,该盖相对于座板1.2的横向侧面覆盖座椅支撑结构3的一侧。此外,用于乘员的操作和/或释放和锁定的杠杆11安装在盖侧。例如,杠杆11被配置为致动座椅倾斜系统2和/或缓冲结构3.2的运动。
[0057]
图4a和图4b分别示出了座椅1的一部分和座椅倾斜系统2的侧视图,其中座椅1处于不同的位置。特别地,座椅1通过第二旋转致动器7、8围绕第二旋转轴线spa、特别是俯仰轴线倾斜。俯仰运动使整个座椅结构1.1倾斜到乘员的h点hp下方,并作为斜倚功能,使乘员可以更直立或斜倚。座板1.2的前部,特别是缓冲结构3.2,以乘员大腿角度倾斜和/或弯曲以保持大腿的接触和支撑。当座椅1处于或接近完全斜倚的位置时,前缓冲垫的倾斜运动还可以防止乘客的腿抬离车辆地板f。
[0058]
图5a和图5b分别示出了座椅1和座椅倾斜系统2的正视图,其中座椅1处于不同位置。特别地,座椅1通过第一旋转致动器5、6围绕第一旋转轴线sra、特别是侧倾轴线倾斜。侧倾运动使整个座椅结构1.1在乘员的h点hp下方横向倾斜,其作为一种额外的运动,用于舒适性、交互、进入或离开或自动驾驶车辆环境中的任何活动。
[0059]
图6a至图6c分别示出了座椅1和座椅倾斜系统2的立体图,其中座椅1处于不同位置。特别地,图6a示出了座椅1通过第三旋转致动器9围绕第三旋转轴线sya、特别是偏航轴线旋转。偏航运动使整个座椅结构1.1转动,而座椅1可在任何方向上锁定,例如在自动驾驶车辆v环境中,以确保舒适、交互、进入或离开。
[0060]
图6b和图6c示出座椅1围绕第三旋转轴线sya旋转并且围绕第一旋转轴线sra以及第二旋转轴线spa倾斜。在每个相应的旋转轴线sya、spa、sra设定的行程限制内,座椅1能以偏航-俯仰-侧倾运动的任意组合移动和锁定。前缓冲弯曲部也可以定位并锁定在设定行程限制内的任何所需位置。所示示例是可用于进入或离开的多个可能组合位置和运动组合的摘录。
[0061]
图7a至图7c分别示出了座椅倾斜系统2的实施例的立体图。座椅倾斜系统2包括针
对侧倾轴线的第一组手动或动力旋转致动器5、6,例如座椅倾斜器,以及针对俯仰轴线的第二组手动或动力驱动的旋转致动器7、8,例如座椅倾斜器。
[0062]
图7a示出了每个旋转致动器5、6和7、8与杆12、12
′
相连接,所述杆12、12
′
形成了倾斜器机构rm的驱动轴。根据所示的实施例,第一旋转致动器5、6经由连续的杆12连接。第二旋转致动器7、8分别连接到单独的杆12
′
,其端部彼此隔开。换句话说:第二旋转致动器7、8之间的杆12
′
被间隙断开,使得第二旋转致动器7、8不通过杆12
′
彼此连接。特别地,杆适配器13布置在第二旋转致动器7、8之间,以便沿着第二旋转轴线spa、特别是沿着俯仰轴线连接杆12
′
。该间隙允许相应的杆12、12
′
自由转动并释放所有四个手动或动力旋转致动器5至8。第三旋转致动器9与图7c所示的杆12
″
连接。
[0063]
弹簧14用于平衡俯仰和侧倾运动。弹簧14例如是螺旋弹簧,特别是张紧盘簧。根据所示的实施例,每个旋转致动器5至8包括两个弹簧14,以便满足倾斜器机构rm的所需载荷。
[0064]
弹簧14被布置和被配置为在旋转轴线spa、sra中的每一个上沿两个方向致动。弹簧14被配置为将旋转致动器5至8朝着侧倾轴线和俯仰轴线两者的中心或中性位置偏置。侧倾轴线,特别是第三旋转轴线sra没有被弹簧加载。
[0065]
根据所示的实施例,弹簧14各自以一个端部14.1固定到弹簧片20.1.1,该弹簧片是接合到旋转执行器5至8的倾斜器芯元件5.1至8.1的适配器板20.1、20.2的刚性部分(见图9a至图9c)。特别地,旋转致动器5至8分别包括至少一个倾斜器芯元件5.1至8.1、两个适配器板20.1、20.2和一个弹簧14。每个倾斜器芯元件5.1至8.1被配置为旋转致动器5至8的中心件,并且分别布置在两个适配器板20.1、20.2之间,如图9a和图9b所示。因此,倾斜器芯元件5.1至8.1使得能够对适配器板20.1、20.2和弹簧14进行机械支撑。
[0066]
如图7a所示,一个适配器板20.1接合到中心立方体形适配器15,该适配器被布置为连接所有四个旋转致动器5至8。两个第一旋转致动器5、6和两个第二旋转致动器7、8分别经由它们的适配器板20.1成对安装在立方体形适配器15的相反侧。其他适配器板20.2分别与适配器板20.1相对地面对座椅1的外部区域布置。
[0067]
弹簧14分别接合至适配器板20.1,其中,弹簧端14.1可以法兰状地插入到布置在弹簧片20.1.1内的间隙中。弹簧片20.1.1从接合到中心立方体形适配器15的适配器板20.1的边缘轴向突出。特别地,弹簧片20.1.1沿远离中心立方体形适配器15的方向突出。
[0068]
此外,其他适配器板20.2分别包括从适配器板20.2的边缘朝向适配器板20.1轴向突出的行程止挡件19。行程止挡件19被配置为与插入到适配器板20.1的边缘中的相应凹部19'接合,以便经由第一和第二旋转致动器5至8限制座椅1的运动。凹部19'的端部使得行程止挡件19能够在凹部19'内进行限制运动。图7a示例性地示出了与第一旋转致动器6的凹部19'接合的行程止挡件19。
[0069]
第一旋转致动器5、6还分别经由安装板3.4安装至座椅支撑结构3的横管3.1。将安装板3.4分别拧到相应的横管3.1上,尽管与上平台4.1隔开一定距离,但朝着基础平台4突出。安装板3.4可分别包括中心孔,杆12被引导穿过该中心孔。此外,弹簧14可以接合到安装板3.4,其中弹簧14的另一端(未示出)以形状配合、力配合和/或粘结的方式固定到安装板3.4。
[0070]
第二旋转致动器7、8还分别经由另一安装板4.3安装至基础平台4。其他安装板4.3均接合至上平台4.1或与上平台4.1一体形成。其他安装板4.3还可以分别包括中心孔,杆
12'被引导穿过该中心孔。此外,弹簧14可以接合到另一安装板4.3,其中,弹簧14的另一端(未示出)以形状配合、力配合和/或粘结的方式固定到另一安装板4.3。
[0071]
除了弹簧14或可选地,可使用阻尼器来偏置旋转致动器5至8。
[0072]
图7b示出了座椅倾斜系统2包括多个释放元件16,例如杠杆。参照第一和第二旋转致动器5至8,释放元件16布置在每个杆12、12'的端部。释放元件16均包括中心间隙,杆12、12'之一穿过该中心间隙突出。参照第三旋转致动器9,释放元件16平行于上平台4.1布置,由此,杆12"被引导穿过释放元件16的中心间隙(未示出)。
[0073]
每个释放元件16被配置为立刻释放相应的旋转致动器5至9,例如所有的旋转致动器5至9。因此,分配给第三旋转致动器9的未示出的释放元件16连接至其他释放元件16,以便能够同时释放所有的旋转致动器5至9。例如,缆线系统和/或联动系统17可以用于操作释放元件16。在所示的实施例中,释放元件16连接至缆线系统17,例如,两侧上的鲍登(bowden)缆线。
[0074]
缆线系统17将释放元件16链接到操作和/或释放和锁定的杠杆11,其安装到座椅1的盖侧并且被配置成致动座椅倾斜系统2和/或缓冲结构3.2的运动。如果沿预定方向操作杠杆11,则杆12、12'、12”之一围绕相应的旋转轴线spa、sra、sya运动,从而导致座椅1的期望运动。相应的旋转致动器5至9的弹簧14加载,从而使释放元件16围绕相应的旋转轴线spa、sra、sya旋拧。
[0075]
未示出的锁定机构适于锁定座椅1的期望位置。锁定机构可以耦接至操作和/或释放和锁定的杠杆11。
[0076]
为了释放座椅1的锁定位置,杠杆11在另一个预定方向上被操作,从而导致相应的释放元件16围绕相应的旋转轴线spa、sra、sya旋拧,或者立刻导致所有释放元件16旋拧。第三旋转致动器9的释放元件16可以链接到其他旋转致动器5至8,例如以同时被释放。操作杠杆11以释放所有旋转致动器5至9可包括释放前缓冲垫倾斜。前缓冲垫倾斜也可以由单独的元件释放,例如由按钮或杠杆(未示出)释放。所述单独的元件可以布置在座椅1上的不同位置,并且被配置为以不同类型的释放处理。
[0077]
此外,弹簧14每个均由弹簧盖14.2覆盖,其中在图7b中仅示出了用于第一旋转致动器5的弹簧盖14.2。
[0078]
图7c示出了座椅倾斜系统2的仰视图,其中仅示出了基础平台4的上平台4.1。
[0079]
可以看出,第三旋转致动器9的倾斜器芯元件9.1接合到上平台4.1的底侧。如前所述,偏航轴线sya没有被弹簧加载。因此,倾斜器芯元件9.1未与弹簧14接合,并且适配器板20.1、20.2不包括弹簧片20.1.1和行程止挡件19。
[0080]
根据另一实施例,旋转致动器5至9耦接至在每个轴线处共同工作的至少一个马达m和传动机构,以电动地移动座椅1,如图8c中示例性地示出的。旋转致动器5至9的释放也可以经由电传动机构来实现。例如,单个按钮杠杆或推压按钮可用于同时释放所有旋转致动器5至9。这减少了工作量、释放时间和锁定时间。
[0081]
图8a至图8f分别示出了处于不同位置的座椅倾斜系统2的实施例的侧视图。
[0082]
图8a示出了座椅倾斜系统2的正视图。
[0083]
图8b示出了第一侧倾旋转致动器5、6的侧倾运动的正视图,而弹簧14用于平衡两侧的侧倾运动。由此,当将座椅1调节到期望的角度位置时,乘员获得受控的平滑感觉。此
外,座椅倾斜系统2的动力版本被配置为具有受控速度,例如,使用一组按钮和/或操纵杆进行直观操作不同运动。
[0084]
图8c示出了第二组俯仰旋转致动器7、8的截面图。例如,每个旋转致动器7、8包括用于俯仰运动的倾斜器芯元件7.1、8.1。此外,第三偏航旋转致动器9包括倾斜器芯元件9.1。
[0085]
座椅倾斜系统2还包括旋转轴承18,该旋转轴承布置在上平台4.1和下平台4.2之间,并且被配置为减少移动座椅1所付出的努力。
[0086]
此外,旋转致动器5至9均耦接至马达m。特别地,杆12、12
′
、12
″
均耦接至用于电动移动座椅1的马达m。
[0087]
图8d示出了第一组第一侧倾旋转致动器5、6的截面图。例如,每个旋转致动器5、6包括用于侧倾运动的倾斜器芯元件5.1、6.1。
[0088]
图8e和图8f示出了第二俯仰旋转致动器7、8的俯仰运动的侧视图,而弹簧14用于平衡两侧的俯仰运动。特别地,图8e和图8f示出了座椅1围绕第二旋转轴线spa(即俯仰轴线)的俯仰运动。座椅1以及因此与第一旋转致动器5、6接合的横管3.1相对于基础平台4以及相对于其他旋转致动器7至9侧向地向着右侧旋转(参考观察方向)。
[0089]
图9a至图9c分别示出了座椅倾斜系统2的旋转致动器5至9之一的倾斜器芯元件5.1至9.1之一的实施例的立体图。所示的倾斜器芯元件5.1至9.1包括大致陀螺仪的形状。倾斜器芯元件5.1至9.1进一步包括适于容纳杆12、12'、12”之一的中心孔5.1.1至9.1.1以及在倾斜器芯元件5.1至9.1的外周上布置并分布的多个另外的孔5.1.2至9.1.2。另外的孔5.1.2至9.1.2适于接收布置在适配器板20.1、20.2上的紧固元件20.3,并适于将旋转致动器5至8固定在适配器15上,并且将旋转致动器9固定在上平台4.1上。
[0090]
特别地,图9a和图9b示出了具有多个适配器板20.1、20.2的倾斜器芯元件5.1至9.1之一。如上所述,适配器板20.1、20.2沿着每个相应的旋转轴线sra、spa、sya被布置和被配置为将弹簧片20.1.1附接到弹簧14并且将行程止挡件19附接到凹部19'。动力倾斜器核心可以使用类似的设置。用于第三旋转致动器9的适配器板20.1、20.2可以不包括弹簧片20.1.1和行程止挡件19。图9c示出了没有适配器板20.1、20.2的倾斜器芯元件5.1至9.1之一。
[0091]
图10示出了座椅1的一部分和座椅倾斜系统2的实施例的立体图,其不具有盖10而是具有包括手动线性致动器21.1的手动机构21,这将在下面进一步描述。
[0092]
图11a至图11c示出了没有盖10并且座椅缓冲结构3.2处于不同位置的座椅1和座椅倾斜系统2。特别地,图11a示出了处于第一完全向下折叠位置的缓冲结构3.2。图11b示出了处于向上折叠位置的缓冲结构3.2,并且图11c示出了缓冲结构3.2的较小的已向上折叠、正向下折叠的位置。
[0093]
特别地,图10和图11a至图11c示出了手动机构21,该手动机构包括在缓冲结构3.2的两侧上的手动线性致动器21.1。手动机构21使缓冲结构3.2的前部倾斜或弯曲。特别地,线性致动器21.1可以被配置为弹簧致动器,例如缠绕在主轴21.2上的压缩弹簧。主轴21.2固定至配件3.5,该配件3.5铰接地结合至缓冲结构3.2。主轴21.2进一步被引导通过空心套筒3.6,该空心套筒的直径大于主轴21.2的直径但小于或等于线性致动器21.1的直径。
[0094]
因此,手动机构21被弹簧加载,从而由于乘员的重量使缓冲结构3.2的前部在向上
的方向上偏置,前缓冲垫角度遵循乘员的大腿角度。参照图11a和图11b,当由于乘员的重量而将缓冲结构3.2向下压时,线性致动器21.1被压缩(图11a)。线性致动器21.1的压缩是由于主轴21.2的运动遵循配件3.5的运动而产生的,配件3.5的运动是逆时针旋转的。因此,主轴21.2通过套筒3.6向右移动(参照观察方向)。套筒3.6的面向线性致动器21.1的端部形成用于线性致动器21.1的止挡,因此线性致动器21.1在接触套筒3.6时压缩。
[0095]
当缓冲结构3.2由于乘员的重量的释放而在向上的方向上移动时,线性致动器21.1被释放(图11b)。
[0096]
缓冲结构3.2的后部是静止的,因此保持了座椅1的咬合线bl。因此,缓冲垫倾斜和弯曲轴线ca基本上布置在座板1.2的中心区域中。特别是,倾斜和弯曲轴线ca低于乘员的h点hp,并在接近乘员自然骨盆倾斜的位置稍微向前。根据另一实施例,缓冲结构3.2也可以被分开,使得缓冲结构3.2的每个横向侧面被配置为独立地遵循乘员的每个大腿角度。因此,可以将独立的锁定机构和联动系统耦接至缓冲结构3.2。
[0097]
图12示出了座椅缓冲结构3.2的座椅缓冲面板3.3的实施例的立体图。例如,缓冲面板3.3包括泡沫和/或由任何柔性材料制成,因此前部可以随着缓冲结构3.2的前倾斜运动而弯曲。在所示的实施例中,缓冲面板3.3包括布置在缓冲面板3.3的横向侧面上的切口3.3.1。切口3.3.1(例如凹口)被布置为产生弯曲点,所述弯曲点对应于如前图所示的缓冲结构3.2的倾斜和弯曲轴线ca。
[0098]
图13a和图13b示出了座椅1的所述部分和座椅倾斜系统2的实施例的侧视图,其中座椅缓冲结构3.2处于不同的位置。特别地,图13a示出了处于向上折叠位置的缓冲结构3.2。图13b示出了处于向下折叠位置的缓冲结构3.2。在所示的实施例中,座椅1的整个缓冲垫是可倾斜的。例如,缓冲结构3.2在座板1.2的整个长度和宽度上延伸。枢转点pp布置在乘员h点hp的下方并稍微靠前,在乘员可以轻松通过他/她的体重移位缓冲垫角度的位置。替代地或可选地,缓冲结构3.2可以是弹簧加载的。通过移位整个缓冲结构3.2,咬合线bl将受到影响。
[0099]
附图标记列表
[0100]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
座椅
[0101]
1.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
座椅结构
[0102]
1.2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
座板
[0103]
1.2.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
前座板侧
[0104]
1.3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
靠背
[0105]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
座椅倾斜系统
[0106]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
座椅支撑结构
[0107]
3.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
横管
[0108]
3.2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
缓冲结构
[0109]
3.3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
缓冲面板
[0110]
3.3.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
切口
[0111]
3.4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
安装板
[0112]
3.5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
配件
[0113]
3.6
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
套筒
[0114]4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基础平台
[0115]
4.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
上平台
[0116]
4.2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
下平台
[0117]
4.3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
安装板
[0118]
5至9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转致动器
[0119]
5.1至9.1
ꢀꢀꢀꢀꢀꢀꢀꢀ
倾斜器芯元件
[0120]
5.1.1至9.1.1
ꢀꢀꢀꢀ
中心孔
[0121]
5.1.2至9.1.2
ꢀꢀꢀꢀ
另外的孔
[0122]
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
盖
[0123]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杠杆
[0124]
12、12
′
、12
″ꢀꢀ
杆
[0125]
13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆适配器
[0126]
14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧
[0127]
14.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧端部
[0128]
14.2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧盖
[0129]
15
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
适配器
[0130]
16
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
释放元件
[0131]
17
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
缆线和/或联动系统
[0132]
18
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轴承
[0133]
19
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
行程止挡件
[0134]
19'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
凹部
[0135]
20.1、20.2
ꢀꢀꢀꢀ
适配器板
[0136]
20.1.1
ꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧片
[0137]
20.3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
紧固元件
[0138]
21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
手动机构
[0139]
21.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
线性致动器
[0140]
21.2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
主轴
[0141]
bl
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
咬合线
[0142]
ca
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
倾斜和弯曲轴线
[0143]
cp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
中心点
[0144]
f
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
地板
[0145]
hp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
h点(髋点)
[0146]
pp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
枢转点
[0147]
rm
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
倾斜器机构
[0148]
rp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
参考平面
[0149]
spa
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转轴线,俯仰轴线
[0150]
sra
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转轴线,侧倾轴线
[0151]
sya
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转轴线,偏航轴线
[0152]
v
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车辆
[0153]
x
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
纵轴
[0154]
y
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
横轴
[0155]
z
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
竖直轴
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips